
Lecture: Visual Navigation for Flying Robots
In recent years, flying robots such as quadcopters have gained increased interest in robotics and computer vision research. For navigating safely, these robots need the ability to localize themselves autonomously using their onboard sensors. Potential applications of such systems include the autonomous 3D reconstruction of buildings, inspection and simple maintenance tasks, surveillance of public places as well as in search and rescue systems.
(6 ECTS, changed on 12.7.2012)
December 07, 2012: This course has been distinguished with the Teach Inf Award 2011/12 at our faculty for the best lecture in computer science in the summer term 2012. Thank you very much for your support!
Content
In this course, we will provide an overview of current techniques for 3D localization, mapping and navigation that are suitable for quadcopters. This course will cover the following topics:
- necessary background on robot hardware, sensors, 3D transformations
- motion estimation from images (including interest point detection, feature descriptors, robust estimation, visual odometry, iteratively closest point)
- filtering techniques and data fusion
- non-linear minimization, bundle adjustment, place recognition, 3D reconstruction
- autonomous navigation and exploration of unknown environments
The lecture will be accompanied by a lab course where the students will implement their own visual navigation system. This course is an excellent preparation for a master thesis project in this area.
Lab Course
Exercise sheets will be passed out every other week, containing both theoretical problems and programming exercises (in C++). In an exercise group every other week, we will discuss the solutions to the theory problems and the programming problems. Active participation in the exercises is the requirement for participation in the final exam. This will be written or oral, depending on the number of attendees. The questions will cover all material presented in class.
The practical exercises will be implemented directly on a Parrot Ardrone quadrocopter, so we expect a lot of fun (and broken propellors).
Organization
The lecture will be given by Jürgen Sturm.
Lecture: Tuesday, 10:15-11:45, room 02.09.23 (FMI, Boltzmannstrasse 3)
Teaching assistant: Nikolas Engelhard
Lab course/practice: Thursday: 14:15-15:45, room 02.09.23 or 02.09.38 (lab) (FMI, Boltzmannstrasse 3)
Registration: via TUM campus
The oral exam takes place in room 02.09.59. Sign up for a time slot on the list in front of the secretary (room 02.09.52). On the examination day: Please take a seat in the sofa corner in front of room 02.09.52 until we pick you up.
Schedule
A printer ready version (two sides, six pages per sheet) of the lecture notes can be found here: pdf
| Date | Slides |
| 17.04.2012 | Introduction pdf avi (sorry, poor audio quality!) |
| 24.04.2012 | Linear algebra, geometry, sensors pdf (bad synchronization + missing end –> use pdf) |
| 08.05.2012 | State estimation pdf (bad synchronization –> use pdf) |
| 15.05.2012 | Guest talks |
| 22.05.2012 | Robot control pdf |
| 05.06.2012 | Visual motion estimation pdf |
| 12.06.2012 | Simultaneous localization and mapping pdf |
| 19.06.2012 | Bundle adjustment and stereo correspondence pdf |
| 26.06.2012 | Place recognition, ICP, and dense reconstruction pdf |
| 03.07.2012 | Global navigation and path planning pdf |
| 10.07.2012 | Planning under uncertainty, exploration and coordination pdf |
| 17.07.2012 | Evaluation and benchmarking, time for questions pdf |
Recordings can also be found on the TUM TeleTeachingTool website. The raw recordings (before processing) can usually be found a few days before they have been post-processed as MP4 here.
| Date | Exercise |
| 19.04.2012 | Robot lab pdftgz tgz bag1bag2bag3 |
| 26.04.2012 | Robot lab |
| 03.05.2012 | Exercise: Robot Odometry pdf |
| 10.05.2012 | Robot lab pdf (Last update: May 14, 12:00) |
| 24.05.2012 | Exercise: Robot Localization pdf (Last update: May 24, 21:30) |
| 31.05.2012 | Robot lab pdf (Last update: June 4, 12:00) |
| 14.06.2012 | Exercise: Position Control pdf |
| 21.06.2012 | Exercise: Project proposal pdf pdf |
| 28.06.2012 | Robot lab |
| 05.07.2012 | Exercise: Project mid-term pdf |
| 12.07.2012 | Robot lab |
| 19.07.2012 | Exercise: Project presentation pdf pdf |
The participation in the exercises is obligatory. Participation in the robot lab is recommended, but not mandatory.
Student Projects
| Project title | Team name | Proposal | Midterm | Final |
| Trajectory Generation and Following with Position Correction | Crash Pilots | |||
| Localization with a particle filter | Viking | |||
| Autonomous Landing on a Moving Platform | Beer | |||
| Circling around a person | Dragon Sheep | |||
| Autonomous flying drone for building surveillance | Red One | |||
| Using a Saliency Map to turn the Quadcopter towards interesting points | Brezel | |||
| Gesture Based Control | Weissbier | |||
| Fast landing on a moving vehicle | Roter Baron | |||
| Autonomous Landing on a Moving Platform | Weisswurst |
The video-taped talks from the final presentations are now available online (password required, same as for ICRA proceedings).
Literature
- Probabilistic Robotics. Sebastian Thrun, Wolfram Burgard and Dieter Fox. MIT Press, 2005.
- Computer Vision: Algorithms and Applications. Richard Szeliski. Springer, 2010.
Further Material
- Lehrevaluation (in German)
Export as PDF, XML, TEX or BIB
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Books
2014
[] 
Computer Vision: ACCV 2014 , Springer, volume 9003-9007, 2014.
2013
[] 
Special Issue: Energy Optimization Methods , Springer, volume 104, 2013.
[] 
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , Springer, 2013.
2011
[] 
Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR) , Springer, volume 5681, 2011.
[] 
Stereoscopic Scene Flow for 3D Motion Analysis , Springer, 2011.
2010
[] 
Video Processing and Computational Video , Springer, volume 7082, 2010.
2009
[] 
Statistical and Geometrical Approaches to Visual Motion Analysis , Springer, volume 5604, 2009.
[] 
Energy Minimization Methods for Computer Vision and Pattern Recognition (EMMCVPR) , Springer, volume 5681, 2009.
2007
[] 
Energy Minimization Methods for Computer Vision and Pattern Recognition (EMMCVPR) , Springer, volume 4679, 2007.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Book Chapters
2020
[] 
TUM Flyers: Vision—Based MAV Navigation for Systematic Inspection of Structures , Chapter in Bringing Innovative Robotic Technologies from Research Labs to Industrial End-users (F. Caccavale, C. Ott, B. Winkler, Z. Taylor, eds.), Springer International Publishing, 2020.
[] 
On the Well-Posedness of Uncalibrated Photometric Stereo Under General Lighting , Chapter in (JD Durou, M Falcone, Y Quéau, S Tozza, eds.), Springer International Publishing, 2020.
[] 
RGB-D Vision , Chapter in Encyclopedia of Robotics (M.H. Ang, O. Khatib, B. Siciliano, eds.), Springer Berlin Heidelberg, 2020.
2019
[] 
A Review and Quantitative Evaluation of Direct Visual–Inertial Odometry , Chapter in Multimodal Scene Understanding (M. Yang, B. Rosenhahn, V. Murino, eds.), Academic Press, 2019.
2018
[] 
Image Denoising — Old and New , Chapter in (M Bertalmío, ed.), Springer International Publishing, 2018.
2016
[] 
Applying Random Forests to the Problem of Dense Non-rigid Shape Correspondence , Chapter in Perspectives in Shape Analysis, Springer, 2016.
2015
[] 
Holistic Image Reconstruction for Diffusion MRI , Chapter in Computational Diffusion MRI, Springer, 2015.
Book Chapter, and Oral Presentation at MICCAI 2015 Workshop on Computational Diffusion MRI [] Perception of Deformable Objects and Compliant Manipulation for Service Robots , Chapter in Soft Robotics: From Theory to Applications (A. ASO. BA. R A. Verl, ed.), Springer, 2015. (to appear)
[] 
Skeleton-Based Recognition of Shapes in Images via Longest Path Matching , Chapter in Research in Shape Modeling, Springer International Publishing, volume 1, 2015.
[] Image Segmentation with Shape Priors: Explicit Versus Implicit Representations , Chapter in Handbook of Mathematical Methods in Imaging (O. Scherzer, ed.), Springer, 2015.
2014
[] Active Recognition and Manipulation for Mobile Robot Bin Picking , Chapter in Gearing Up and Accelerating Cross‐fertilization between Academic and Industrial Robotics Research in Europe: Technology Transfer Experiments from the ECHORD Project, Springer, 2014.
[] Increasing Flexibility of Mobile Manipulation and Intuitive Human-Robot Interaction in RoboCup@Home , Chapter in RoboCup 2013, Robot Soccer World Cup XVII, Springer, 2014.
[] 
Joint Super-Resolution Using Only One Anisotropic Low-Resolution Image per q-Space Coordinate , Chapter in Computational Diffusion MRI, Springer, 2014.
Book Chapter, and Oral Presentation at MICCAI 2014 Workshop on Computational Diffusion MRI
2013
[] NimbRo@Home: Winning Team of the RoboCup@Home Competition 2012 , Chapter in RoboCup 2012, Robot Soccer World Cup XVI, Springer, 2013.
[] A Game-Theoretic Approach to Pairwise Clustering and Matching , Chapter in Similarity-Based Pattern Analysis and Recognition, Springer, 2013.
[] 
Moment Constraints in Convex Optimization for Segmentation and Tracking , Chapter in Advanced Topics in Computer Vision, Springer, 2013.
2012
[] Towards Robust Mobility, Flexible Object Manipulation, and Intuitive Multimodal Interaction for Domestic Service Robots , Chapter in RoboCup 2011, Robot Soccer World Cup XV, Springer, 2012.
[] Awareness of Road Scene Participants for Autonomous Driving , Chapter in Handbook of Intelligent Vehicles, Springer, 2012.
[] 
A Sequential Monte Carlo Method for Multi-Target Tracking with the Intensity Filter , Chapter in Advances in Intelligent Signal Processing and Data Mining, Springer-Verlag Berlin Heidelberg, 2012.
[] 
Body Schema Learning , Chapter in Towards Service Robots for Everyday Environments, Springer Berlin/Heidelberg, 2012.
2011
[] 
Image Segmentation with Shape Priors: Explicit Versus Implicit Representations , Chapter in Handbook of Mathematical Methods in Imaging, Springer, 2011.
[] 
Convex Relaxation Techniques for Segmentation, Stereo and Multiview Reconstruction , Chapter in Markov Random Fields for Vision and Image Processing, MIT Press, 2011.
2010
[] 
An Introduction to Total Variation for Image Analysis , Chapter in Theoretical Foundations and Numerical Methods for Sparse Recovery, De Gruyter, 2010.
2007
[] 
Efficient kernel density estimation of shape and intensity priors for level set segmentation , Chapter in Parametric and Geometric Deformable Models: An application in Biomaterials and Medical Imagery (J. S. Suri, A. Farag, eds.), Springer, 2007.
[] 
Tracking clothed people , Chapter in Human Motion - Understanding, Modeling, Capture, and Animation, Springer, 2007.
[] 
Contours, optic flow, and prior knowledge: cues for capturing 3D human motion in videos , Chapter in Human Motion - Understanding, Modeling, Capture, and Animation, Springer, 2007.
2006
[] Diffusion filters and wavelets: What can they learn from each other? , Chapter in Handbook of Mathematical Models in Computer Vision (N. Paragios, Y. Chen, O. Faugeras, eds.), Springer, 2006.
[] PDEs for tensor image processing , Chapter in Visualization and Processing of Tensor Fields (J. Weickert, H. Hagen, eds.), Springer, 2006.
[] A survey on variational optic flow methods for small displacements , Chapter in Mathematical Models for Registration and Applications to Medical Imaging (O. Scherzer, ed.), Springer, volume 10, 2006.
[] 
Integral Invariants and Shape Matching , Chapter in Statistical analysis of shapes (modeling and simulation in science, engineering and technology), Birkhauser, 2006.
[] Probabilistic kernel PCA and its application to statistical shape modeling and inference , Chapter in Kernel Methods in Bioengineering, Signal and Image Processing (G. CVet al., ed.), Idea Group Inc., 2006.
[] Adaptive structure tensors and their applications , Chapter in Visualization and Processing of Tensor Fields (J. Weickert, H. Hagen, eds.), Springer, 2006.
2005
[] Variational segmentation with shape priors , Chapter in Handbook of Mathematical Models in Computer Vision (Y. CO. F N. Paragios, ed.), Springer, 2005.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Journal Articles
2024
[] 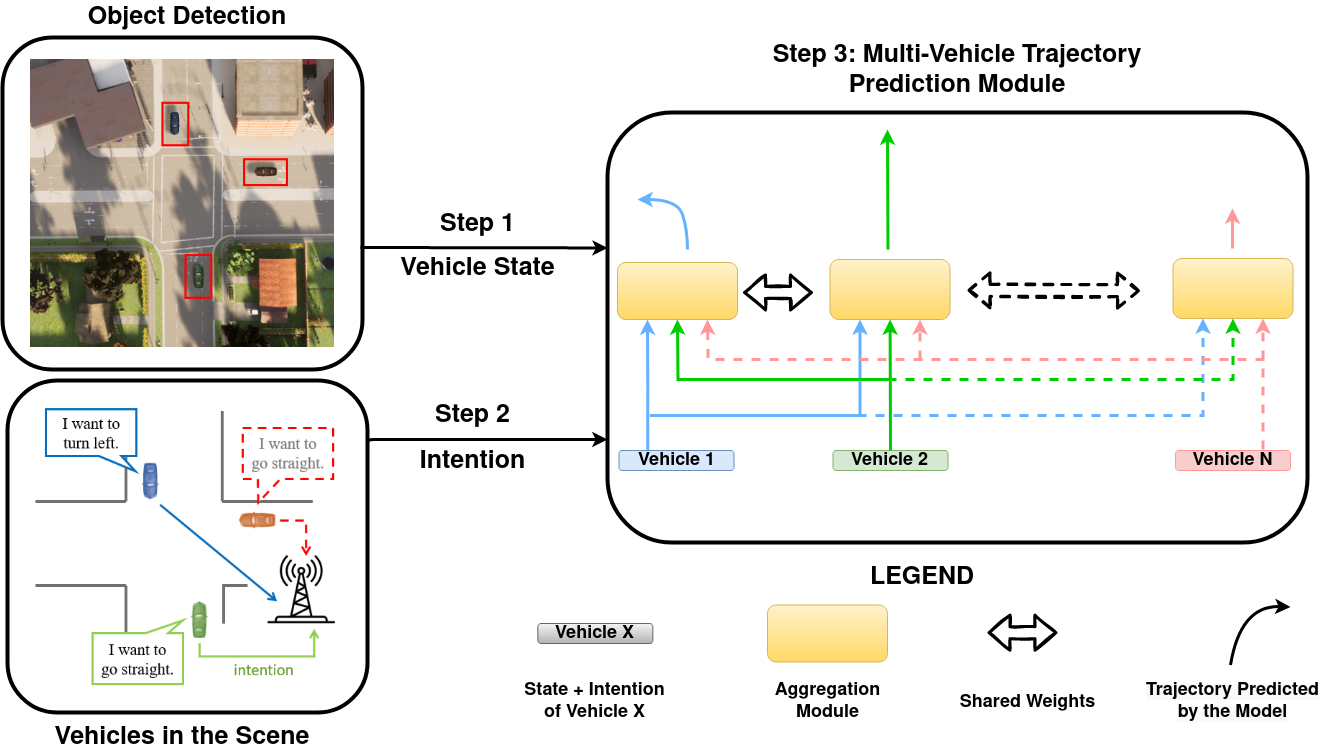
Multi-vehicle trajectory prediction and control at intersections using state and intention information , In Neurocomputing, Elsevier, 2024. ([link][project page][code][pre-print])
2023
[] 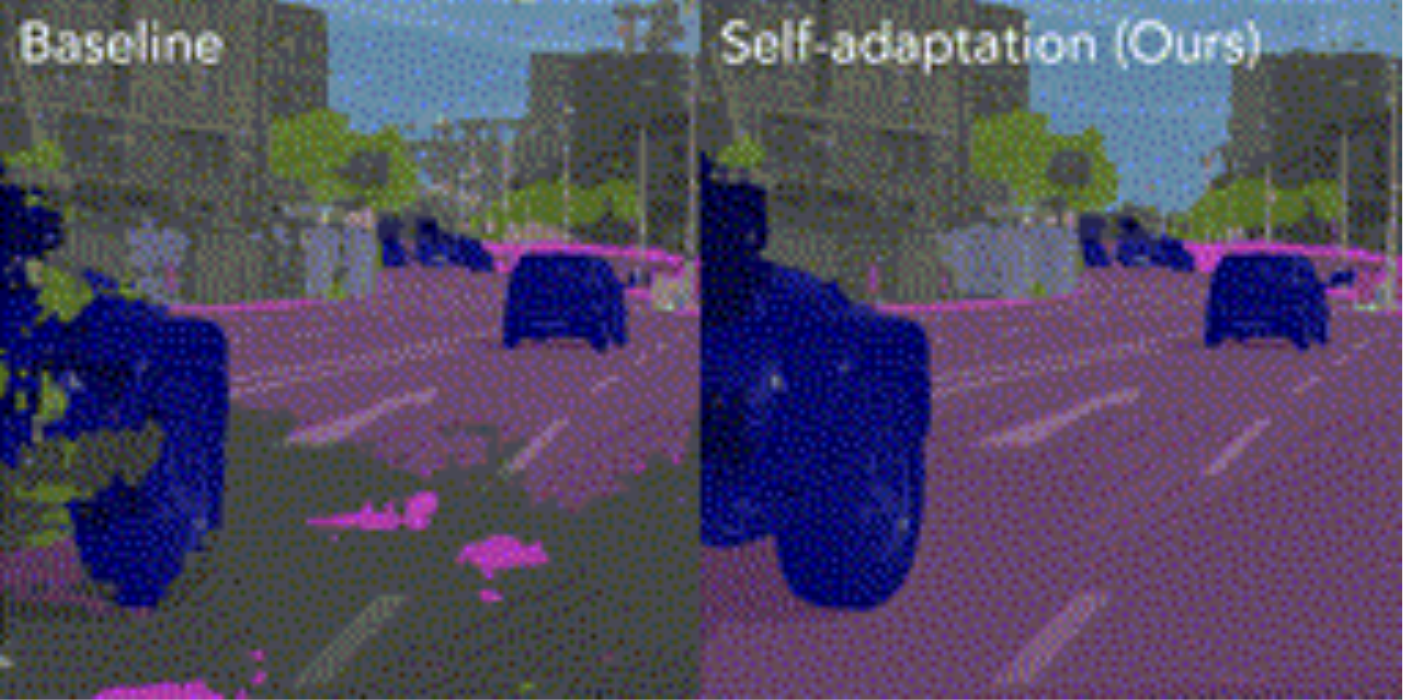
Semantic Self-adaptation: Enhancing Generalization with a Single Sample , In Transactions on Machine Learning Research (TMLR), 2023.
[] 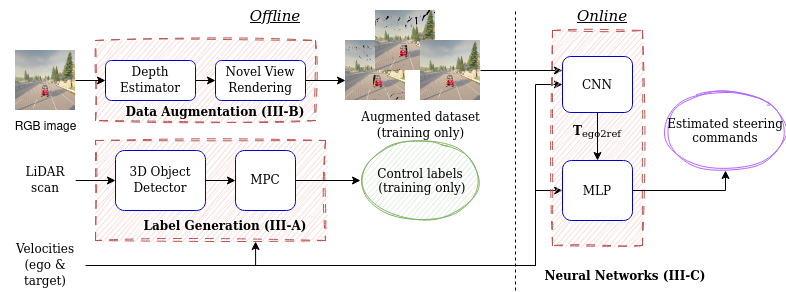
Robust Autonomous Vehicle Pursuit without Expert Steering Labels , In IEEE Robotics and Automation Letters (RA-L), volume 8, 2023. ([arXiv][code])
[] 
Learning vision based autonomous lateral vehicle control without supervision , In Applied Intelligence, Springer, 2023. ([paper][github])
[] 
E-nerf: Neural radiance fields from a moving event camera , In IEEE Robotics and Automation Letters, IEEE, volume 8, 2023. ([project page])
2022
[] 
Exploring Novel Algorithms for Atrial Fibrillation Detection by Driving Graduate Level Education in Medical Machine Learning , In Physiological Measurement, IOP Publishing, volume 43, 2022.
[] 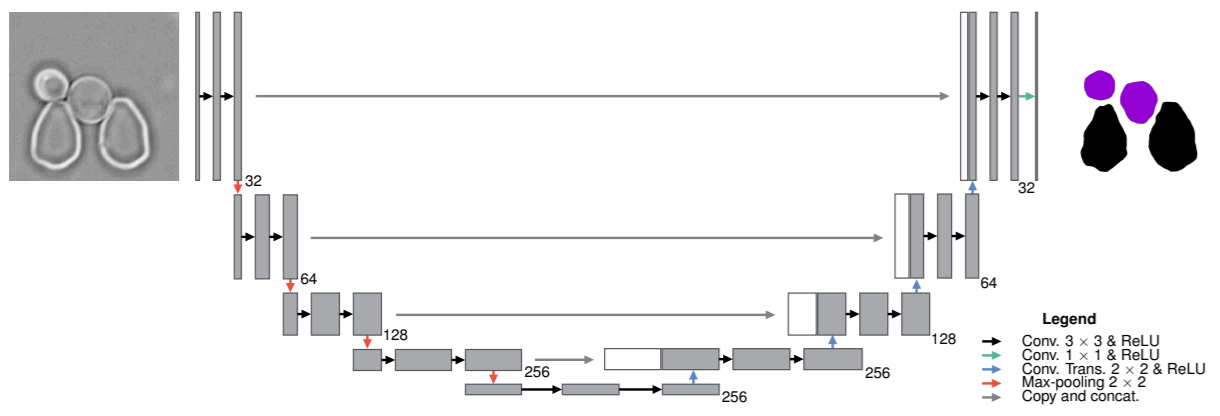
Yeast cell segmentation in microstructured environments with deep learning , In Biosystems, Elsevier, volume 211, 2022.
[] 
Deep Learning in Attosecond Metrology , In Optics Express, OSA, volume 30, 2022.
Editor's Pick [] 
DM-VIO: Delayed Marginalization Visual-Inertial Odometry , In IEEE Robotics and Automation Letters (RA-L) & International Conference on Robotics and Automation (ICRA), volume 7, 2022. ([arXiv][video][project page][supplementary][code])
[] 
A Cutting-Plane Method for Sublabel-Accurate Relaxation of Problems with Product Label Spaces , In International Journal of Computer Vision (IJCV), 2022. ([code])
[] 
Lifting the Convex Conjugate in Lagrangian Relaxations: A Tractable Approach for Continuous Markov Random Fields , In SIAM J. Imaging Sci., volume 15, 2022.
2020
[] 
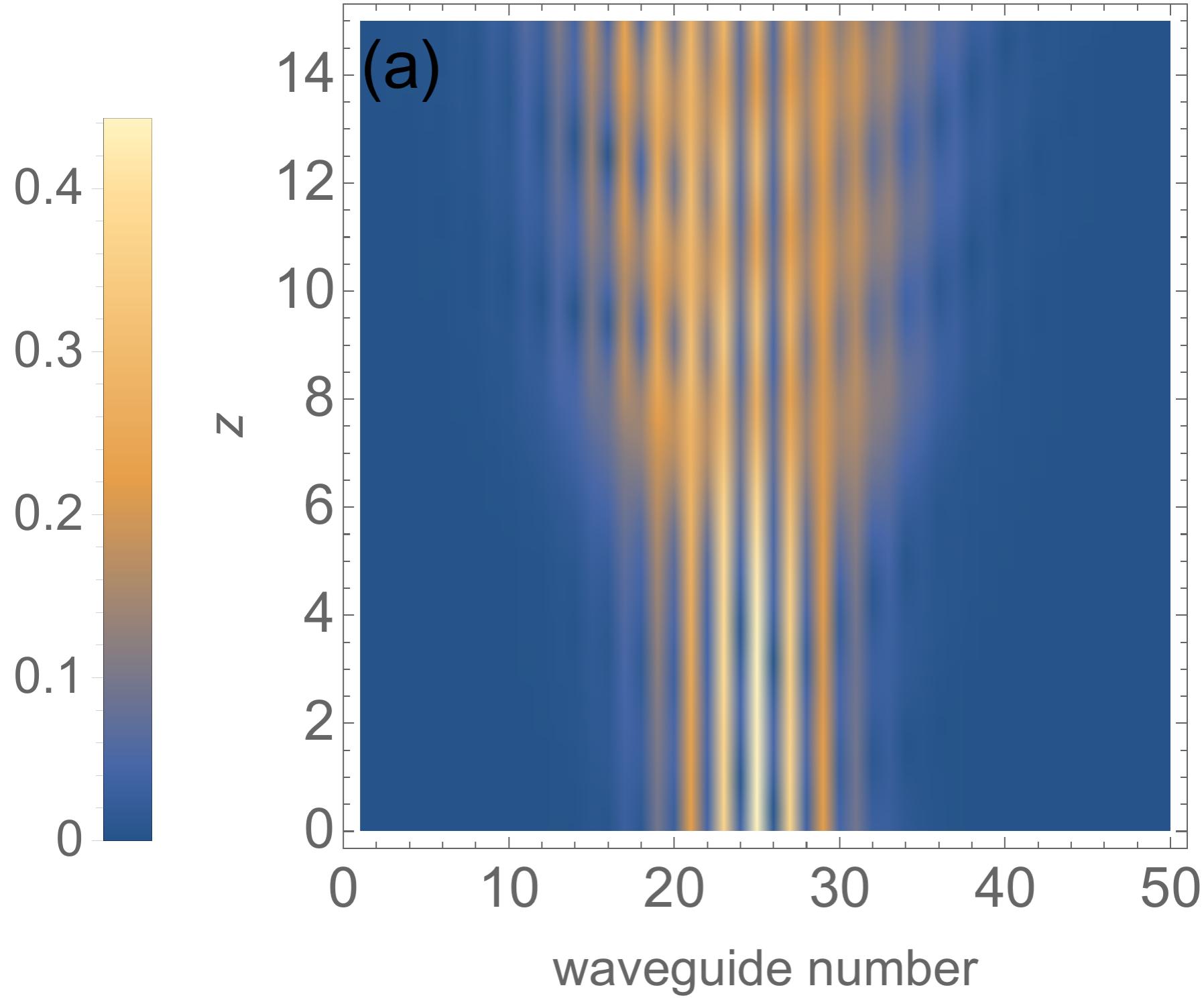
Dirac equation on a square waveguide lattice with site-dependent coupling strengths and the gravitational Aharonov-Bohm effect , In Physical Review A, volume 102, 2020.
[] 
Accelerating in vivo fast spin echo high angular resolution diffusion imaging with an isotropic resolution in mice through compressed sensing , In Magnetic Resonance in Medicine, volume 85, 2020.
[] ARDEA—An MAV with skills for future planetary missions , In Journal of Field Robotics (JFR), 2020.
[] Relocalization With Submaps: Multi-Session Mapping for Planetary Rovers Equipped With Stereo Cameras , In IEEE Robotics and Automation Letters, volume 5, 2020.
[] 
From Planes to Corners: Multi-Purpose Primitive Detection in Unorganized 3D Point Clouds , In IEEE Robotics and Automation Letters (RA-L) & International Conference on Robotics and Automation (ICRA), volume 5, 2020.
[] 
GN-Net: The Gauss-Newton Loss for Multi-Weather Relocalization , In IEEE Robotics and Automation Letters (RA-L), volume 5, 2020. ([arXiv][video][project page][supplementary])
[] 
Visual-Inertial Mapping with Non-Linear Factor Recovery , In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robotics and Automation (ICRA), IEEE, volume 5, 2020. ([arxiv])
[] 
Photometric Depth Super-Resolution , In IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), volume 42, 2020. ([supp] [project page])
[] Bregman Proximal Mappings and Bregman-Moreau Envelopes under Relative Prox-Regularity , In Journal of Optimization Theory and Applications, volume 184, 2020.
2019
[] Augmented Autoencoders: Implicit 3D Orientation Learning for 6D Object Detection , In International Journal of Computer Vision, 2019.
[] 
Efficient Deep Network Architectures for Fast Chest X-Ray Tuberculosis Screening and Visualization , In Scientific Reports, volume 9, 2019.
[] 
A Non-invasive 3D Body Scanner and Software Tool towards Analysis of Scoliosis , In BioMed Research International (BMRI), 2019. ([pdf])
[] 
A Region-based Gauss-Newton Approach to Real-Time Monocular Multiple Object Tracking , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 41, 2019.
[] 
Functional Maps Representation on Product Manifolds , In Computer Graphics Forum, volume 38, 2019. ((Presented at Symposium on Geometry Processing (SGP)) [arxiv])
[] Video Object Segmentation without Temporal Information , In IEEE Trans. Pattern Anal. Mach. Intell., volume 41, 2019.
2018
[] 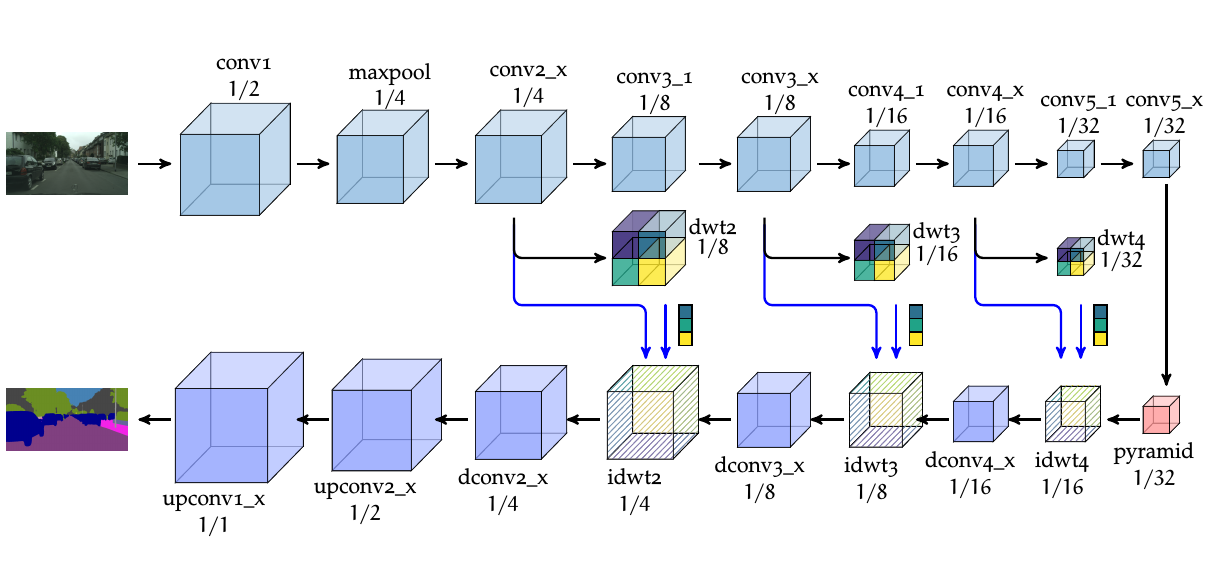
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform , In , 2018. ([arxiv])
[] 
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras , In IEEE Robotics and Automation Letters & Int. Conference on Intelligent Robots and Systems (IROS), IEEE, 2018. ([arxiv])
[] 
What Makes Good Synthetic Training Data for Learning Disparity and Optical Flow Estimation? , In , volume 41, 2018. (arxiv)
[] 
Online Photometric Calibration of Auto Exposure Video for Realtime Visual Odometry and SLAM , In IEEE Robotics and Automation Letters (RA-L), volume 3, 2018. (This paper was also selected by ICRA'18 for presentation at the conference.[arxiv][video][code][project])
ICRA'18 Best Vision Paper Award - Finalist [] 
Variational Reflectance Estimation from Multi-view Images , In Journal of Mathematical Imaging and Vision, volume 60, 2018. ([arxiv])
[] The homotopy method revisited: Computing solution paths of L1-regularized problems , In Math. Comput., volume 87, 2018.
[] 
Variational Methods for Normal Integration , In Journal of Mathematical Imaging and Vision, volume 60, 2018. ([arxiv],[codes])
[] 
Normal Integration: A Survey , In Journal of Mathematical Imaging and Vision, volume 60, 2018. ([arxiv],[codes])
[] 
LED-based Photometric Stereo: Modeling, Calibration and Numerical Solution , In Journal of Mathematical Imaging and Vision, volume 60, 2018. ([arxiv],[codes])
[] 
Challenges in Monocular Visual Odometry: Photometric Calibration, Motion Bias and Rolling Shutter Effect , In In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robots and Systems (IROS), volume 3, 2018. ([arxiv])
[] 
Direct Sparse Odometry , In IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018.
2017
[] Regularized Pointwise Map Recovery from Functional Correspondence , In Comput. Graph. Forum, volume 36, 2017.
[] Tau Like Proteins Reduce Torque Generation in Microtubule Bundles , In Biophysical Journal, Elsevier, volume 112, 2017.
[] Genetic defects in ß-spectrin and tau sensitize C. elegans axons to movement-induced damage via torque-tension coupling , In eLife, eLife Sciences Publications Limited, volume 6, 2017.
[] 
Fast and accurate surface normal integration on non-rectangular domains , In Computational Visual Media, volume 3, 2017.
[] 
Photometric Stereo with Only Two Images: A Theoretical Study and Numerical Resolution , In Image and Vision Computing, volume 57, 2017.
Editor's choice [] 
Consistent Partial Matching of Shape Collections via Sparse Modeling , In Computer Graphics Forum, Wiley, volume 36, 2017.
[] 
Partial Functional Correspondence , In Computer Graphics Forum, Wiley, volume 36, 2017.
[] Computer Vision für 3-D-Rekonstruktion - Vom Nischenthema zum Mainstream , In Informatik Spektrum, volume 40, 2017.
[] Sequential Convex Programming for Computing Information-Theoretic Minimal Partitions: Nonconvex Nonsmooth Optimization , In SIAM J. Imaging Sci., volume 10, 2017.
[] Deep Learning for Computer Vision (Dagstuhl Seminar 17391) , In Dagstuhl Reports, volume 7, 2017.
[] Spatially Regularized Fusion of Multiresolution Digital Surface Models , In IEEE Trans. Geosci. Remote. Sens., volume 55, 2017.
2016
[] 
Dirac equation in 2-dimensional curved spacetime, particle creation, and coupled waveguide arrays , In Annals of Physics, volume 374, 2016.
[] 
A Single-Lobe Photometric Stereo Approach for Heterogeneous Material , In SIAM Journal on Imaging Sciences, volume 9, 2016.
[] 
White Matter MS-Lesion Segmentation Using a Geometric Brain Model , In IEEE Transactions on Medical Imaging, volume 35, 2016.
[] 
Non-Rigid Puzzles , In Computer Graphics Forum, Wiley, volume 35, 2016.
Received the Best Paper Award at SGP 2016 [] 
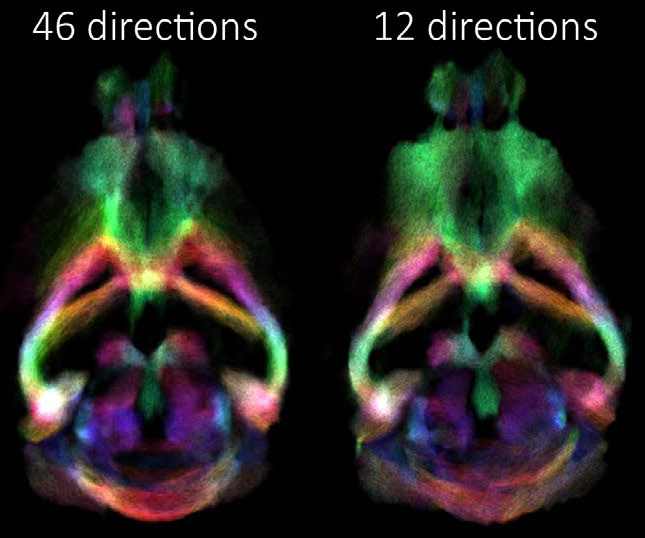
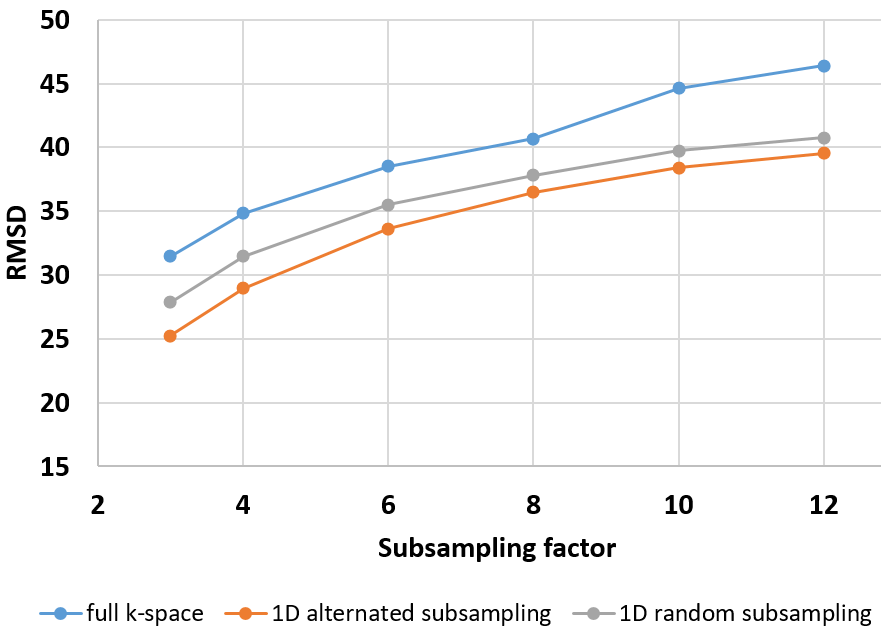
q-Space Deep Learning: Twelve-Fold Shorter and Model-Free Diffusion MRI Scans , In IEEE Transactions on Medical Imaging, volume 35, 2016. Special Issue on Deep Learning
Special Issue on Deep Learning [] Bias and Precision Analysis of Diffusional Kurtosis Imaging for Different Acquisition Schemes , In Magnetic Resonance in Medicine, 2016. (early view)
[] 
An Accurate and Robust Artificial Marker based on Cyclic Codes , In IEEE Transactions on Pattern Analysis and Machine Intelligence, 2016. (to appear)
[] 
Anisotropic Diffusion Descriptors , In Computer Graphics Forum - Proc. EUROGRAPHICS, Wiley, volume 35, 2016.
[] Spectral Decompositions Using One-Homogeneous Functionals , In SIAM J. Imaging Sci., volume 9, 2016.
[] 
Collaborative Total Variation: A General Framework for Vectorial TV Models , In SIAM J. Imaging Sci., volume 9, 2016.
[] 
Midrange Geometric Interactions for Semantic Segmentation , In International Journal of Computer Vision, Springer US, volume 117, 2016. Special Issue on Graphical Models for Scene Understanding
2015
[] Variational Depth From Focus Reconstruction , In IEEE Trans. Image Process., volume 24, 2015.
[] 
Incremental and Batch Planar Simplification of Dense Point Cloud Maps , In Robotics and Autonomous Systems (RAS) ECMR '13 Special Issue, North-Holland Publishing Co., volume 69, 2015.
[] Entropy Minimization for Groupwise Planar Shape Co-alignment and its Applications , In IEEE Signal Process. Lett., volume 22, 2015.
[] Introspective classification for robot perception , In The International Journal of Robotics Research (IJRR), 2015.
[] 
Cloud-based collaborative 3D mapping in real-time with low-cost robots , In IEEE Transactions on Automation Science and Engineering, IEEE, volume 12, 2015.
[] 
The Primal-Dual Hybrid Gradient Method for Semiconvex Splittings , In SIAM Journal on Imaging Sciences, volume 8, 2015.
[] 
Realistic Photometric Stereo Using Partial Differential Irradiance Equation Ratios , In Computers and Graphics, Elsevier, volume 51, 2015.
[] 
A Simple and Effective Relevance-based Point Sampling for 3D Shapes , In Pattern Recognition Letters, Elsevier, volume 59, 2015.
[] Multi-Layered Mapping and Navigation for Autonomous Micro Aerial Vehicles , In Journal of Field Robotics, 2015. (to appear)
[] NimbRo Explorer: Semi-Autonomous Exploration and Mobile Manipulation in Rough Terrain , In Journal of Field Robotics, 2015. (to appear)
[] Efficient Dense Rigid-Body Motion Segmentation and Estimation in RGB-D Video , In International Journal of Computer Vision, Springer US, 2015.
[] 
Efficient Reactive Navigation with Exact Collision Determination for 3D Robot Shapes , In International Journal of Advanced Robotic Systems, volume 12, 2015. ([video])
[] 
Fast Visual Odometry for 3-D Range Sensors , In IEEE Transactions on Robotics, volume 31, 2015. ([video])
[] Field phenotyping of grapevine growth using dense stereo reconstruction , In BMC Bioinformatics, volume 16, 2015.
[] Car detection by fusion of HOG and causal MRF , In IEEE T. on Aerospace and Electronic Systems, volume 51, 2015.
[] 
The Role of Diffusion in Figure Hunt Games , In Journal of Mathematical Imaging and Vision, Springer, volume 52, 2015.
[] 
Fast and Accurate Surface Alignment through an Isometry-Enforcing Game , In Pattern Recognition, Elsevier, volume 48, 2015.
2014
[] Multi-Resolution Surfel Maps for Efficient Dense 3D Modeling and Tracking , In Journal of Visual Communication and Image Representation, volume 25, 2014.
[] Dense Real-Time Mapping of Object-Class Semantics from RGB-D Video , In Journal of Real-Time Image Processing, Springer, 2014.
[] Rough Terrain Mapping and Navigation using a Continuously Rotating 2D Laser Scanner , In Künstliche Intelligenz, Springer, volume 28, 2014.
[] 
Robust Region Detection via Consensus Segmentation of Deformable Shapes , In Computer Graphics Forum, Wiley, volume 33, 2014.
[] 
Scale-Aware Navigation of a Low-Cost Quadrocopter with a Monocular Camera , In Robotics and Autonomous Systems (RAS), volume 62, 2014.
[] 
Convex Relaxation of Vectorial Problems with Coupled Regularization , In SIAM Journal on Imaging Sciences, volume 7, 2014.
[] 
A Super-resolution Framework for High-Accuracy Multiview Reconstruction , In International Journal of Computer Vision, volume 106, 2014.
2013
[] 
Introduction to the special issue on visual understanding and applications with RGB-D cameras , In Journal of Visual Communication and Image Representation (JVCI), 2013.
[] 
3D Mapping with an RGB-D Camera , In IEEE Transactions on Robotics (T-RO), volume 30, 2013.
[] 
Tight Convex Relaxations for Vector-Valued Labeling , In SIAM Journal on Imaging Sciences, volume 6, 2013.
[] 
A Survey and Comparison of Discrete and Continuous Multi-label Optimization Approaches for the Potts Model , In International Journal of Computer Vision, volume 104, 2013. (Code available)
[] 
Spatially Varying Color Distributions for Interactive Multi-Label Segmentation , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 35, 2013. (Code available)
[] 
Stable and Fast Techniques for Unambiguous Compound Phase Coding , In Image and Vision Computing, volume 31, 2013.
[] 
A Scale Independent Selection Process for 3D Object Recognition in Cluttered Scenes , In International Journal of Computer Vision, Springer US, volume 102, 2013.
2012
[] RoboCup@Home: Demonstrating Everyday Manipulation Skills in RoboCup@Home , In IEEE Robotics and Automation Magazine, volume 19, 2012.
[] Efficient 3D Object Perception and Grasp Planning for Mobile Manipulation in Domestic Environments , In Robotics and Autonomous Systems, volume 61, 2012.
[] 
Total Cyclic Variation and Generalizations , In Journal of Mathematical Imaging and Vision, volume 47, 2012.
[] 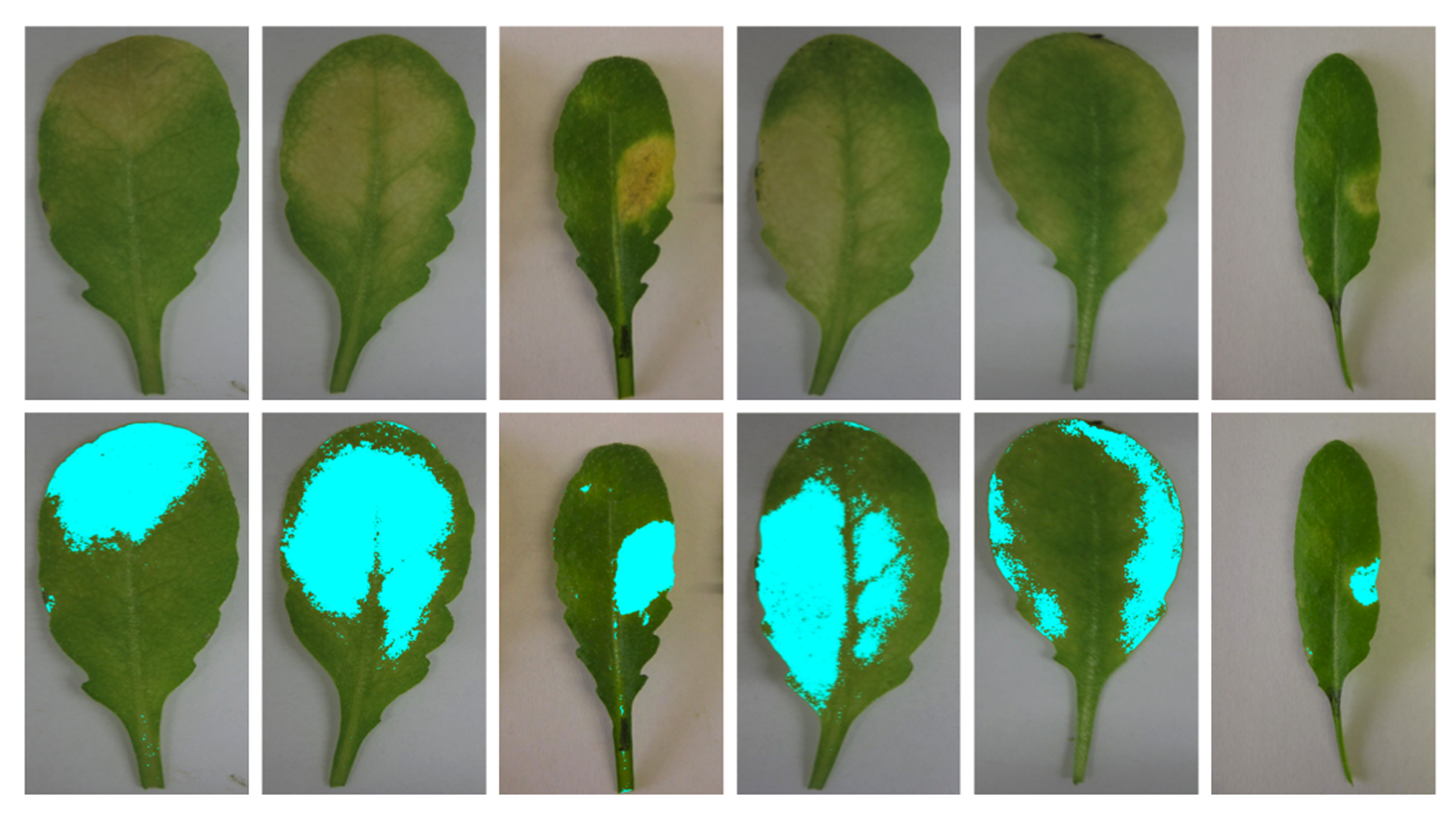
An image classification approach to analyze the suppression of plant immunity by the human pathogen Salmonella Typhimurium , In BMC Bioinformatics, volume 13, 2012.
[] 
Online-6D-SLAM für RGB-D-Sensoren , In at - Automatisierungstechnik, volume 60, 2012.
[] 
Fast Joint Estimation of Silhouettes and Dense 3D Geometry from Multiple Images , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 34, 2012.
[] 
On the André motive of certain irreducible symplectic varieties , In Geometriae Dedicata, volume 156, 2012.
[] 
The Natural Total Variation Which Arises from Geometric Measure Theory , In SIAM Journal on Imaging Sciences, volume 5, 2012.
[] 
Image segmentation with one shape prior - A template-based formulation , In Image and Vision Computing, volume 30, 2012.
[] 
Optimal Solutions for Semantic Image Decomposition , In Image and Vision Computing, volume 30, 2012.
[] 
A linear framework for region-based image segmentation and inpainting involving curvature penalization , In International Journal of Computer Vision, volume 99, 2012.
[] 
A Coding Cost Framework for Super-resolution Motion Layer Decomposition , In IEEE Transactions on Image Processing, volume 21, 2012.
[] 
A Convex Approach to Minimal Partitions , In SIAM Journal on Imaging Sciences, volume 5, 2012.
[] 
Imposing Semi-local Geometric Constraints for Accurate Correspondences Selection in Structure from Motion: a Game-Theoretic Perspective , In International Journal of Computer Vision, Springer US, volume 97, 2012.
Invited submission
2011
[] 
Bootstrap Optical Flow and Uncertainty Measure , In Computer Vision and Image Understanding, volume 115, 2011.
[] 
A Probabilistic Framework for Learning Kinematic Models of Articulated Objects , In Journal on Artificial Intelligence Research (JAIR), volume 41, 2011.
[] 
A Variational Approach to Vesicle Membrane Reconstruction from Fluorescence Imaging , In Pattern Recognition, volume 44, 2011.
[] 
Tactile Sensing for Mobile Manipulation , In IEEE Transactions on Robotics (T-RO), 2011.
[] 
Motion Field Estimation from Alternate Exposure Images , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 33, 2011.
[] 
The Elastic Ratio: Introducing Curvature into Ratio-Based Globally Optimal Image Segmentation , In IEEE Transactions on Image Processing, volume 20, 2011.
[] 
Stereoscopic Scene Flow Computation for 3D Motion Understanding , In International Journal of Computer Vision, volume 95, 2011.
[] 
Multiview Stereo and Silhouette Consistency via Convex Functionals over Convex Domains , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 33, 2011.
[] 
Large-Scale Integer Linear Programming for Orientation-Preserving 3D Shape Matching , In Computer Graphics Forum (Proceedings Symposium Geometry Processing), Eurographics, volume 30, 2011.
2010
[] Multiclass Multimodal Detection and Tracking in Urban Environments , In International Journal of Robotics Research, 2010.
[] 
Movement Directionality in Collective Migration of Germ Layer Progenitors , In Current Biology, volume 20, 2010.
[] 
Stability of tautological vector bundles on Hilbert squares of surfaces , In Rendiconti del Seminario Matematico della Universitá di Padova, volume 124, 2010.
[] 
The Hodge conjecture for self-products of certain K3 surfaces , In Journal of Algebra, volume 324, 2010.
[] 
A Combinatorial Solution for Model-based Image Segmentation and Real-time Tracking , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 32, 2010.
[] 
Global Solutions of Variational Models with Convex Regularization , In SIAM Journal on Imaging Sciences, volume 3, 2010.
2009
[] 
Control of convergent yolk syncytial layer nuclear movement in zebrafish , In Development, volume 136, 2009.
[] 
An appearance-based visual compass for mobile robots , In Robotics and Autonomous Systems, volume 57, 2009.
[] 
Body schema learning for robotic manipulators from visual self-perception , In Journal of Physiology-Paris, volume 103, 2009. (Neurorobotics)
[] 
Folgen von Höhenfußpunktdreiecken und ihre Grenzpunkte , In Elemente der Mathematik, volume 64, 2009.
[] 
Hodge classes on self-products of K3 surfaces , In Bonner Mathematische Schriften, volume 395, 2009. (Ph.D. thesis)
[] 
B-Spline Modeling of Road Surfaces with an Application to Free Space Estimation , In Transactions on Intelligent Transportation Systems, volume 10, 2009.
[] 
Continuous Global Optimization in Multiview 3D Reconstruction , In International Journal of Computer Vision, volume 84, 2009.
[] 
Combined region- and motion-based 3D tracking of rigid and articulated objects , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 32, 2009.
[] 
On local region models and a statistical interpretation of the piecewise smooth Mumford-Shah functional , In International Journal of Computer Vision, volume 84, 2009.
2008
[] Hierarchical Reactive Control for Humanoid Soccer Robots , In International Journal of Humanoid Robots, volume 5, 2008.
[] Monte Carlo localization in outdoor terrains using multilevel surface maps , In Journal of Field Robotics, volume 25, 2008.
[] 
Tailoring the magnetoresistance of MnAs/GaAs:Mn granular hybrid nanostructures , In Applied Physics Letters, volume 92, 2008.
[] 
Influence of non-random incorporation of Mn ions on the magnetotransport properties of $Ga_{1-x}Mn_{x}As$ alloys , In Physica status solidi. C. Current topics in solid state physics, volume 5, 2008.
[] 
3-D Reconstruction of Shaded Objects from Multiple Images Under Unknown Illumination , In International Journal of Computer Vision, volume 76, 2008.
[] 
Nonlinear Dynamical Shape Priors for Level Set Segmentation , In Journal of Scientific Computing, volume 35, 2008.
[] 
Efficient Nonlocal Means for Denoising of Textural Patterns , In IEEE Transactions on Image Processing, volume 17, 2008.
2007
[] Non-iterative Vision-based Interpolation of 3D Laser Scans , In Autonomous Robots and Agents, volume 76, 2007.
[] An Efficient Extension to Elevation Maps for Outdoor Terrain Mapping and Loop Closing , In International Journal of Robotics Research (IJRR), volume 26, 2007.
[] Supervised semantic labeling of places using information extracted from sensor data , In Journal on Robotics and Autonomous Systems (RAS), volume 55, 2007.
[] 
Quantitative modeling of the annealing-induced changes of the magnetotransport in $Ga_{1-x}Mn_{x}As$ alloys , In Journal of Applied Physics, volume 102, 2007.
[] 
Weighted Minimal Hypersurface Reconstruction , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 29, 2007.
[] 
A review of statistical approaches to level set segmentation: integrating color, texture, motion and shape , In International Journal of Computer Vision, volume 72, 2007.
[] 
Computer Lernen Sehen , In Industrial Vision, volume 2, 2007.
[] Three-dimensional shape knowledge for joint image segmentation and pose tracking , In International Journal of Computer Vision, volume 73, 2007. (available online)
[] Algorithmic Differentiation: Application to Variational Problems in Computer Vision , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 29, 2007.
2006
[] 
Strong non-Arrhenius temperature dependence of the resistivity in the regime of traditional band transport , In Applied Physics Letters, volume 89, 2006.
[] 
Integral invariants for shape matching , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 28, 2006.
[] 
A multiphase dynamic labeling model for variational recognition-driven image segmentation , In International Journal of Computer Vision, volume 66, 2006.
[] 
Kernel density estimation and intrinsic alignment for shape priors in level set segmentation , In International Journal of Computer Vision, volume 69, 2006.
[] 
Dynamical statistical shape priors for level set based tracking , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 28, 2006.
2005
[] 
Spin-dependent localization effects in GaAs:Mn/MnAs granular paramagnetic-ferromagnetic hybrids at low temperatures , In J. Superlattices and Microstructures, Elsevier, volume 37, 2005.
[] 
Motion Competition: A variational framework for piecewise parametric motion segmentation , In International Journal of Computer Vision, volume 62, 2005.
2003
[] 
Binary partitioning, perceptual grouping, and restoration with semidefinite programming , In IEEE Transactions on Pattern Analysis and Machine Intelligence, volume 25, 2003.
[] 
Statistical shape knowledge in variational motion segmentation , In Image and Vision Computing, volume 21, 2003.
[] 
Shape Statistics in Kernel Space for Variational Image Segmentation , In Pattern Recognition, volume 36, 2003.
Awarded Best Paper of the Year 2003
2002
[] 
Diffusion Snakes: Introducing statistical shape knowledge into the Mumford–Shah functional , In International Journal of Computer Vision, volume 50, 2002.
[] 
Travelling waves of exitation in neural field models: Equivalence of rate descriptions and integrate-and-fire dynamics , In Neural Computation, volume 14, 2002.
1999
[] 
Flow equations for the Héon-Heiles Hamiltonian , In Physica D, volume 126, 1999.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Preprints
2024
[] 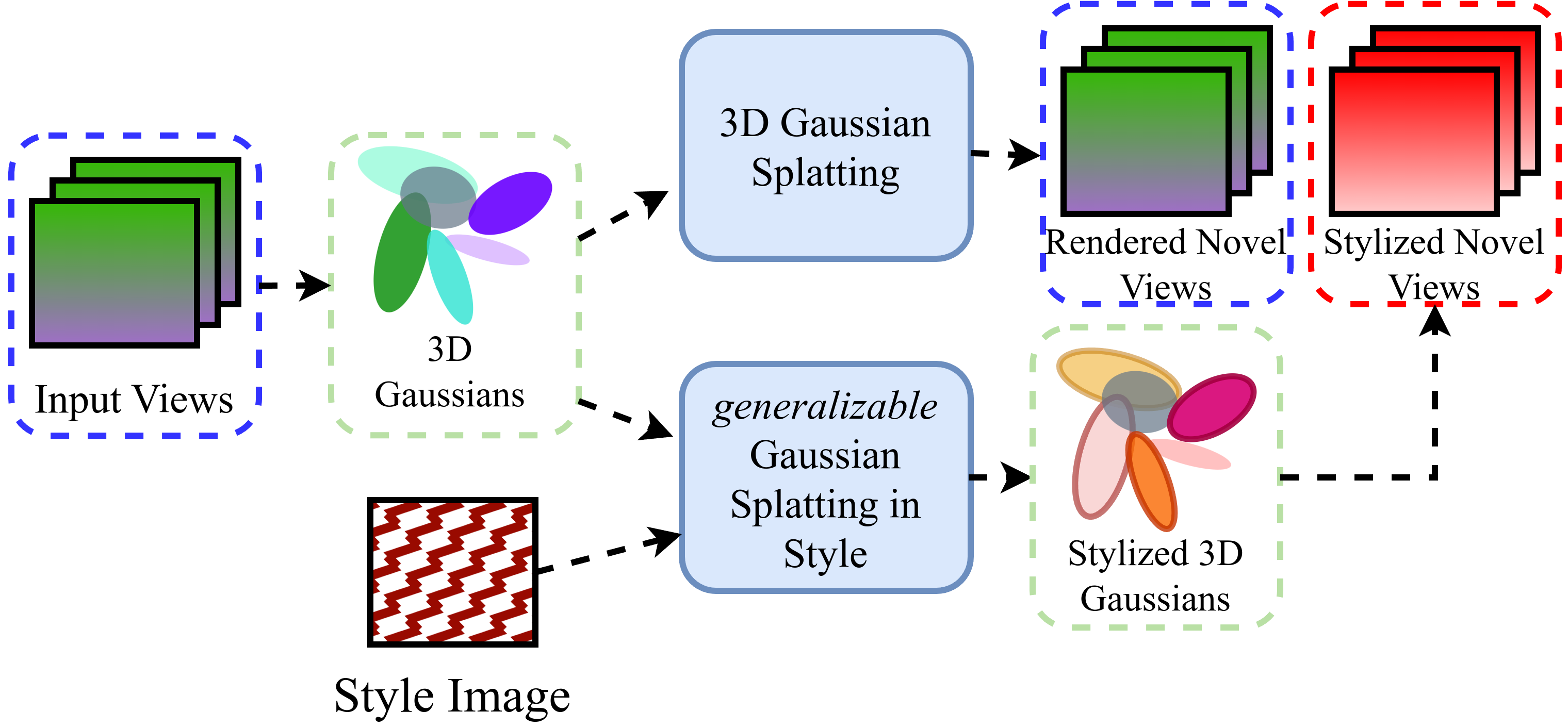
Gaussian Splatting in Style , In arXiv preprint arXiv:2403.08498, 2024.
[] Uncertainty-Based Abstention in LLMs Improves Safety and Reduces Hallucinations , In arXiv preprint, 2024.
2023
[] 
Geometrically Consistent Partial Shape Matching , In arXiv preprint arXiv:2309.05013, 2023.
[] 
Weight-Aware Implicit Geometry Reconstruction with Curvature-Guided Sampling , In arXiv preprint arXiv:2306.02099, 2023.
[] 
Joint MR sequence optimization beats pure neural network approaches for spin-echo MRI super-resolution , In arXiv preprint arXiv:2305.07524, 2023.
[] 
Scale-Equivariant Deep Learning for 3D Data , In arXiv preprint, 2023.
[] Quality Control at Your Fingertips: Quality-Aware Translation Models , In arXiv preprint, 2023.
2022
[] 
4Seasons: Benchmarking Visual SLAM and Long-Term Localization for Autonomous Driving in Challenging Conditions , In arXiv preprint arXiv:2301.01147, 2022.
[] 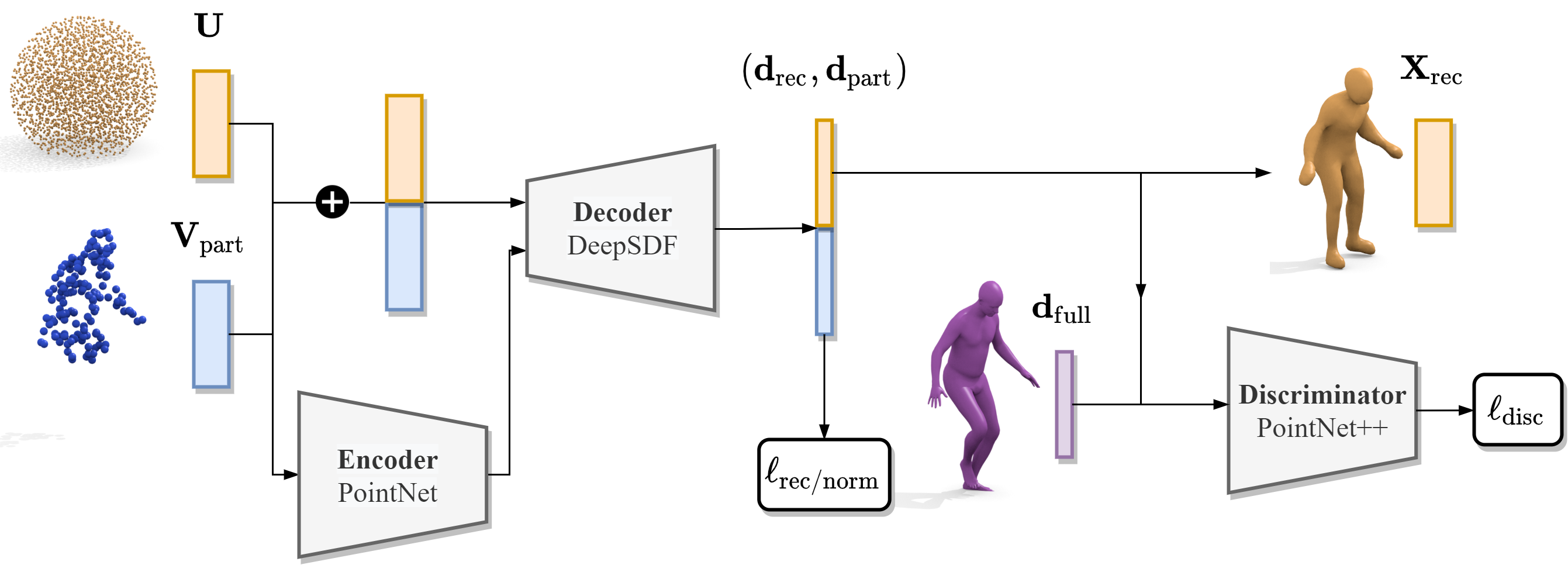
Implicit Shape Completion via Adversarial Shape Priors , In arXiv preprint arXiv:2204.10060, 2022.
[] 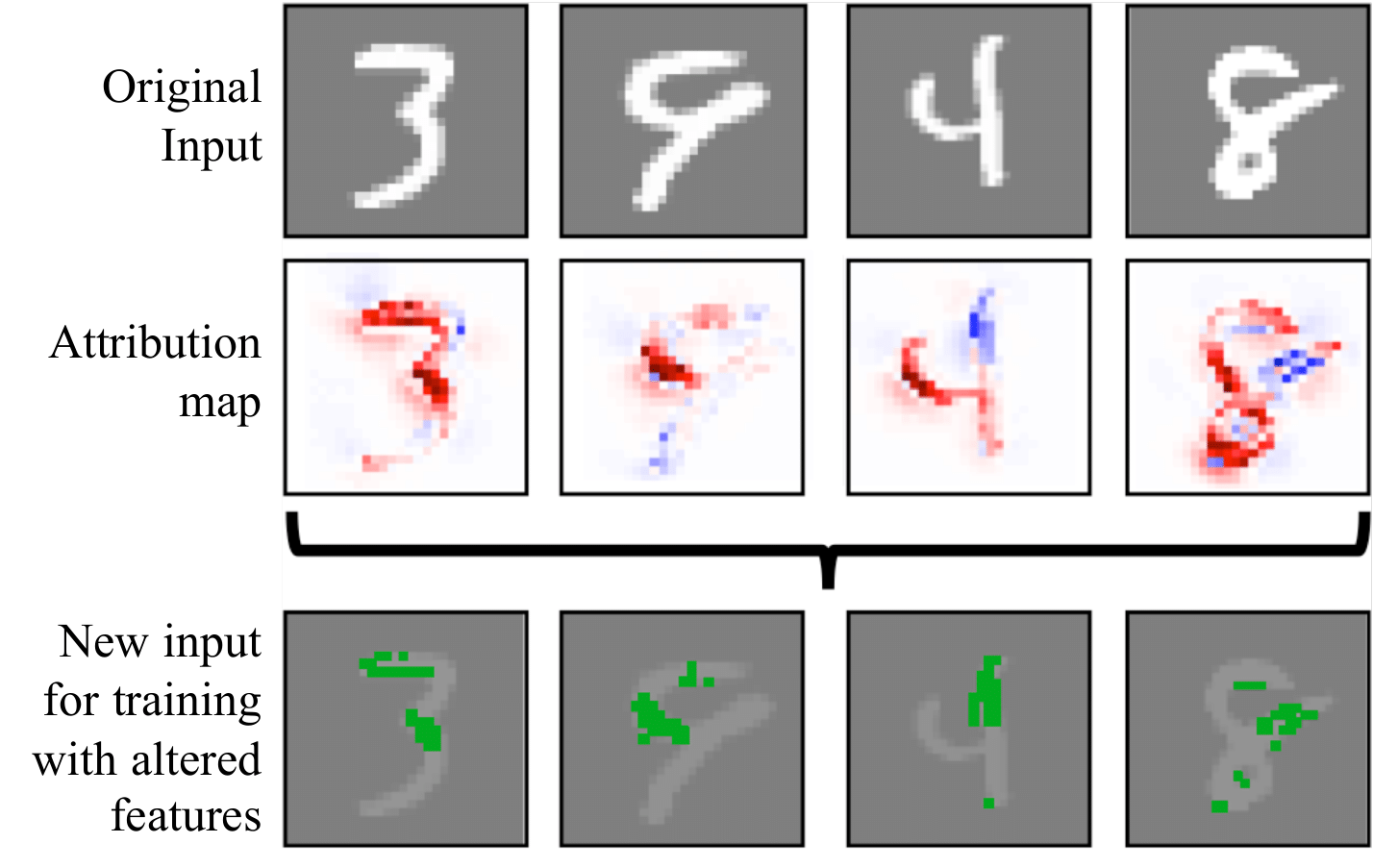
Challenger: Training with Attribution Maps , In arXiv preprint, 2022.
2021
[] DeepLab2: A TensorFlow Library for Deep Labeling , In arXiv preprint arXiv:2106.09748, 2021.
[] 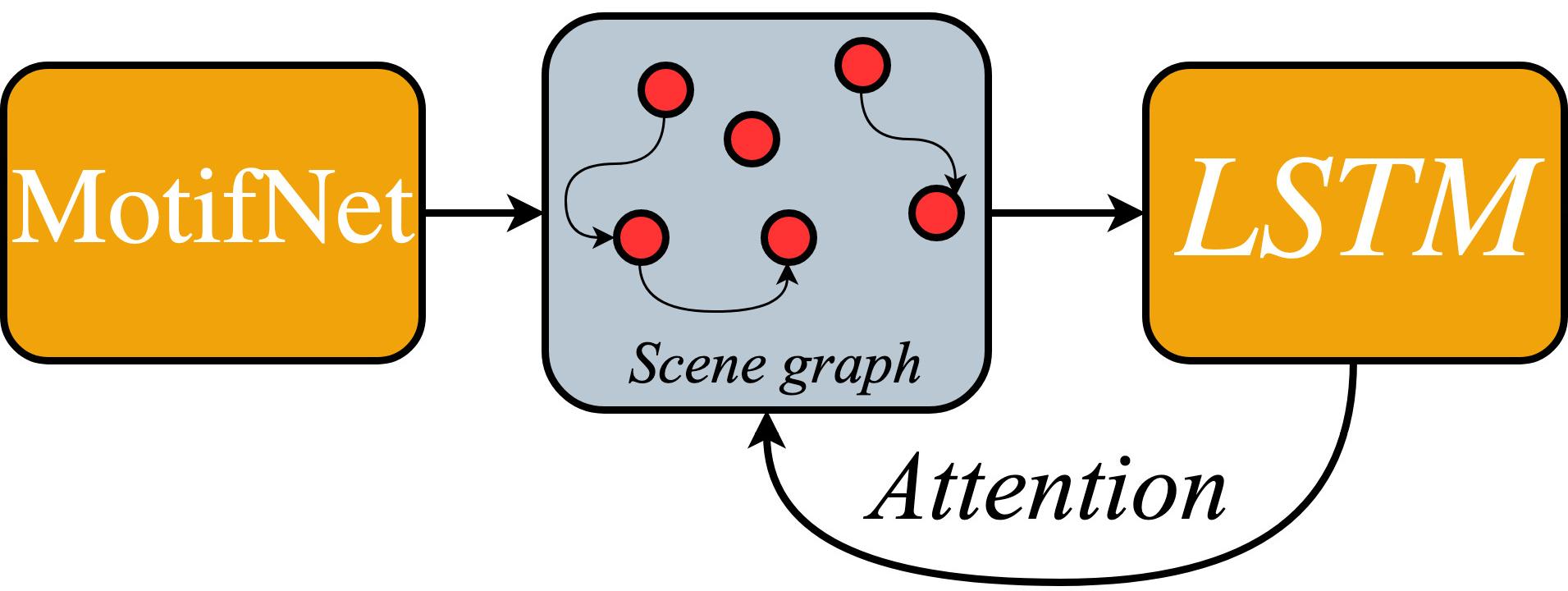
Scene Graph Generation for Better Image Captioning? , In arXiv preprint, 2021.
[] 
Event-Based Feature Tracking in Continuous Time with Sliding Window Optimization , In arXiv preprint, 2021.
[] 
Rotation-Equivariant Deep Learning for Diffusion MRI , In arXiv preprint, 2021.
2020
[] 
Neural Online Graph Exploration , In arXiv preprint arXiv:2012.03345, 2020. ([arxiv])
[] 
Speech Synthesis and Control Using Differentiable DSP , In arXiv preprint arXiv:2010.15084, 2020. ([listen to audio results])
[] 
Deep Learning for Virtual Screening: Five Reasons to Use ROC Cost Functions , In arXiv preprint arXiv:2007.07029, 2020.
2019
[] 
Deep Learning for 2D and 3D Rotatable Data: An Overview of Methods , In arXiv preprint arXiv:1910.14594, 2019.
[] 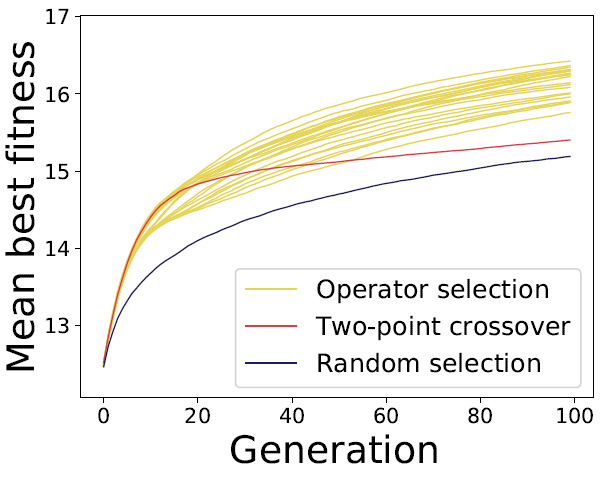
Learning to Evolve , In arXiv preprint arXiv:1905.03389, 2019.
2018
[] 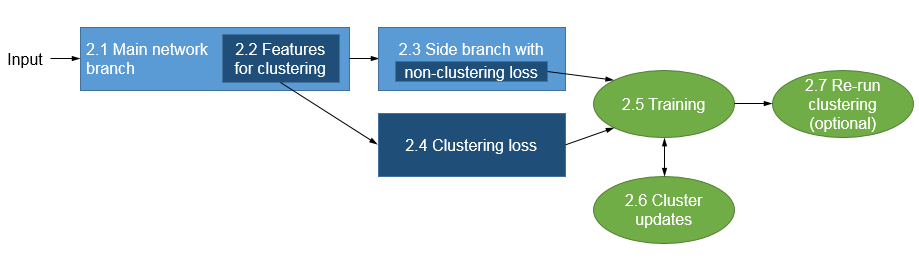
Clustering with Deep Learning: Taxonomy and New Methods , In arXiv preprint arXiv:1801.07648, 2018.
[] 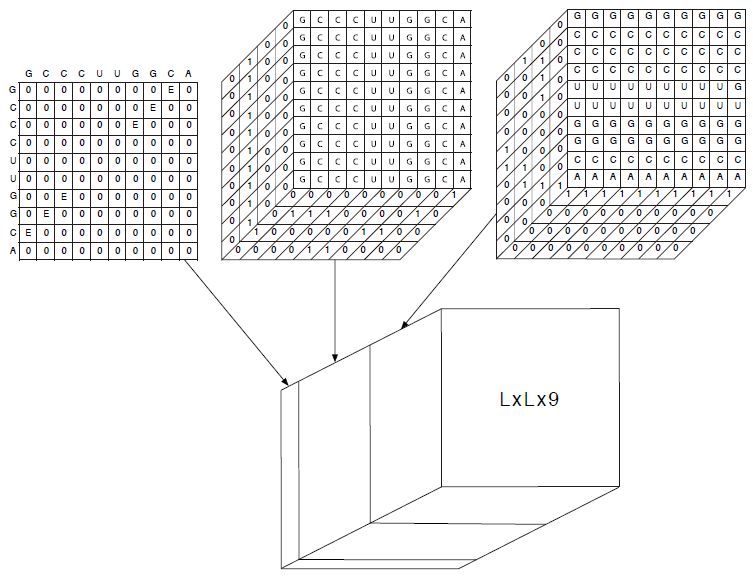
Precursor microRNA Identification Using Deep Convolutional Neural Networks , In bioRxiv preprint 414656, 2018. (bioRxiv:414656)
2017
[] 
Regularization for Deep Learning: A Taxonomy , In arXiv preprint arXiv:1710.10686, 2017.
2016
[] 
Bayesian Inference of Bijective Non-Rigid Shape Correspondence , In arXiv preprint arXiv:1607.03425, 2016. ([slides])
2007
[] Fully automated segmentation and morphometrical analysis of muscle fibre images , In Cytometry Part A, volume 71, 2007. (available online)
2006
[] Numerical aspects of TV flow , In Numerical Algorithms, volume 41, 2006.
[] Nonlinear structure tensors , In Image and Vision Computing, volume 24, 2006.
[] Highly accurate optic flow computation with theoretically justified warping , In International Journal of Computer Vision, volume 67, 2006.
[] A TV flow based local scale estimate and its application to texture discrimination , In Journal of Visual Communication and Image Representation, volume 17, 2006.
[] Level Set Segmentation with Multiple Regions , In IEEE Transactions on Image Processing, volume 15, 2006.
2004
[] 
On the equivalence of soft wavelet shrinkage, total variation diffusion, total variation regularization, and SIDEs , In SIAM Journal on Numerical Analysis, volume 42, 2004.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Conference and Workshop Papers
2024
[] 
Sparse Views, Near Light: A Practical Paradigm for Uncalibrated Point-light Photometric Stereo , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024. ([supp])
[] 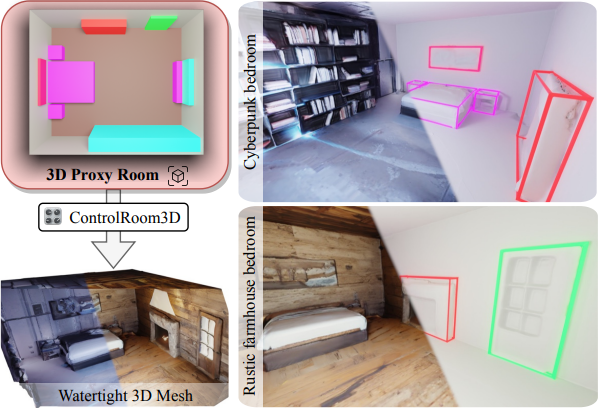
ControlRoom3D: Room Generation using Semantic Proxy Rooms , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024.
[] From Variance to Veracity: Unbundling and Mitigating Gradient Variance in Differentiable Bundle Adjustment Layers , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024.
[] 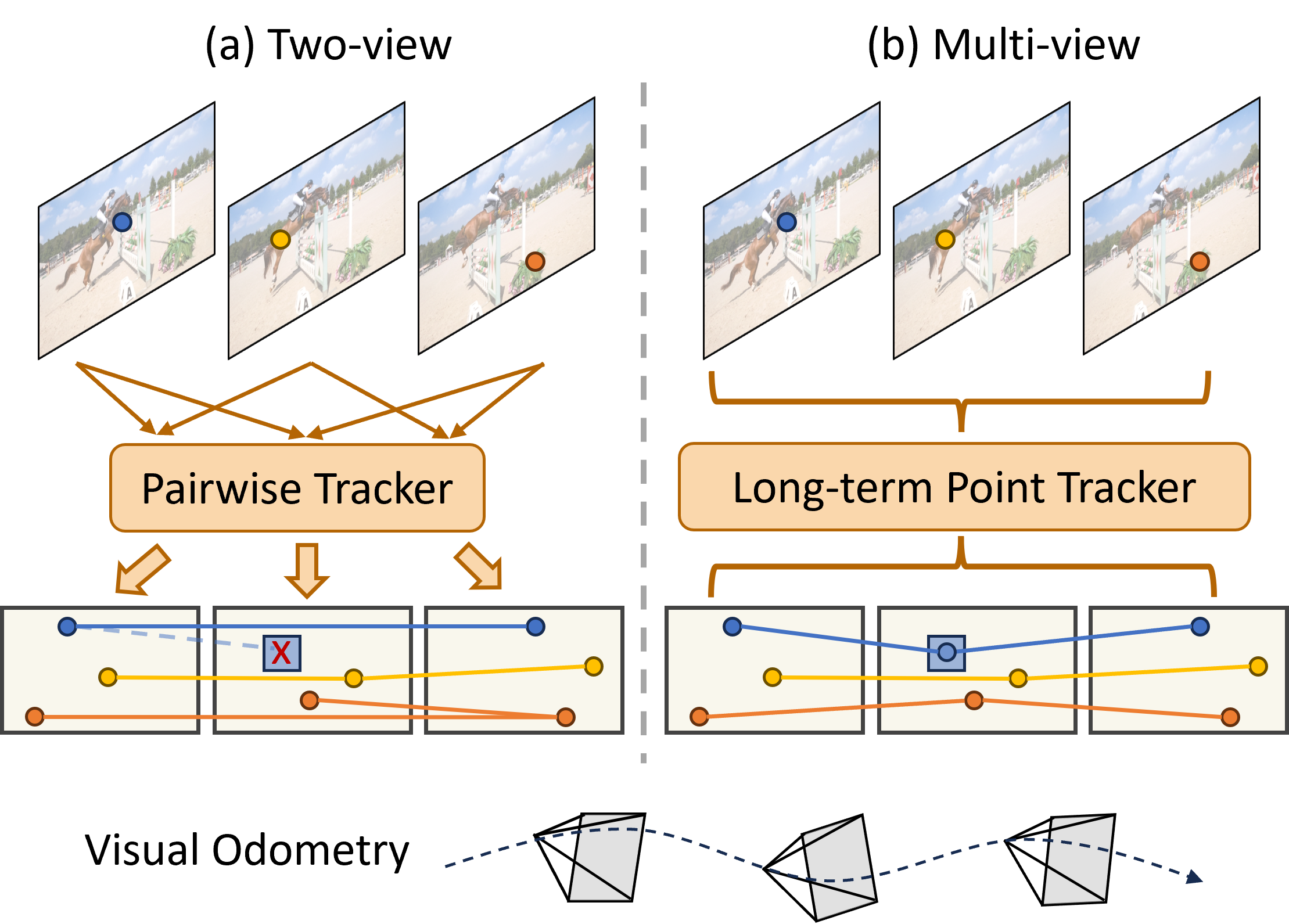
LEAP-VO: Long-term Effective Any Point Tracking for Visual Odometry , In , 2024.
[] 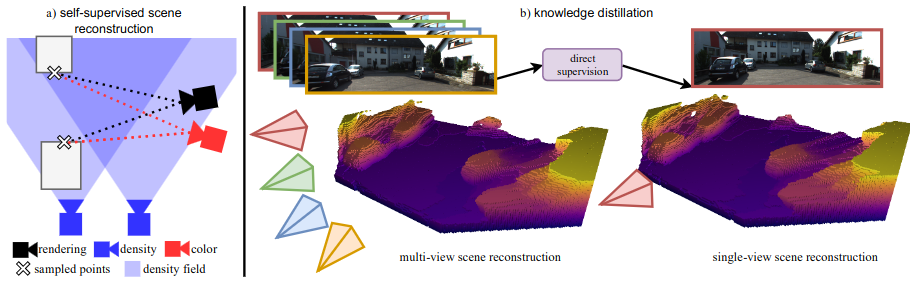
Boosting Self-Supervision for Single-View Scene Completion via Knowledge Distillation , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2024. ([project page])
[] 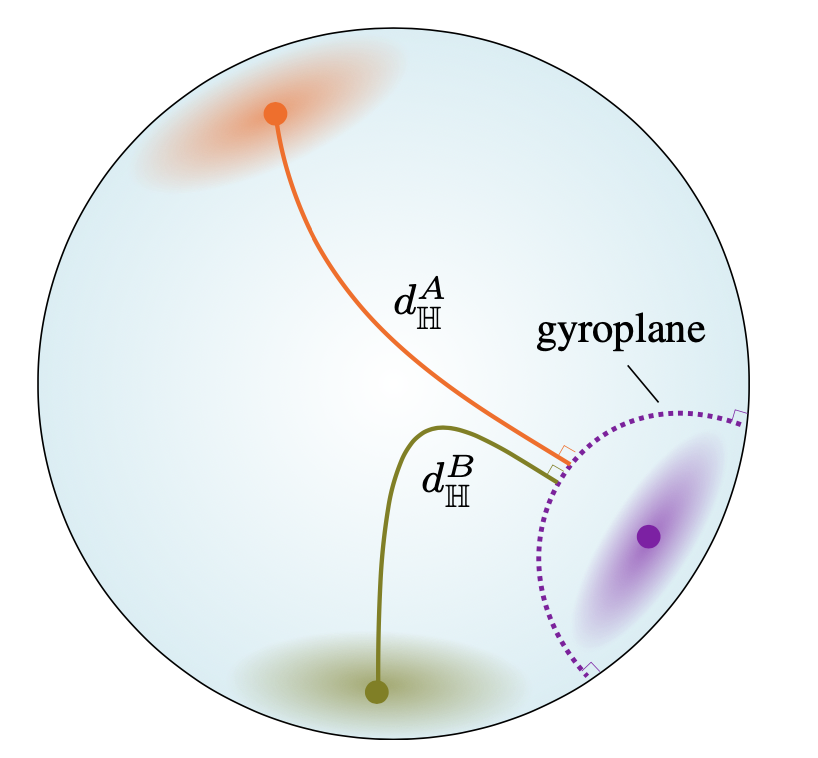
Flattening the Parent Bias: Hierarchical Semantic Segmentation in the Poincaré Ball , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024.
[] 
Finsler-Laplace-Beltrami Operators with Application to Shape Analysis , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024.
[] 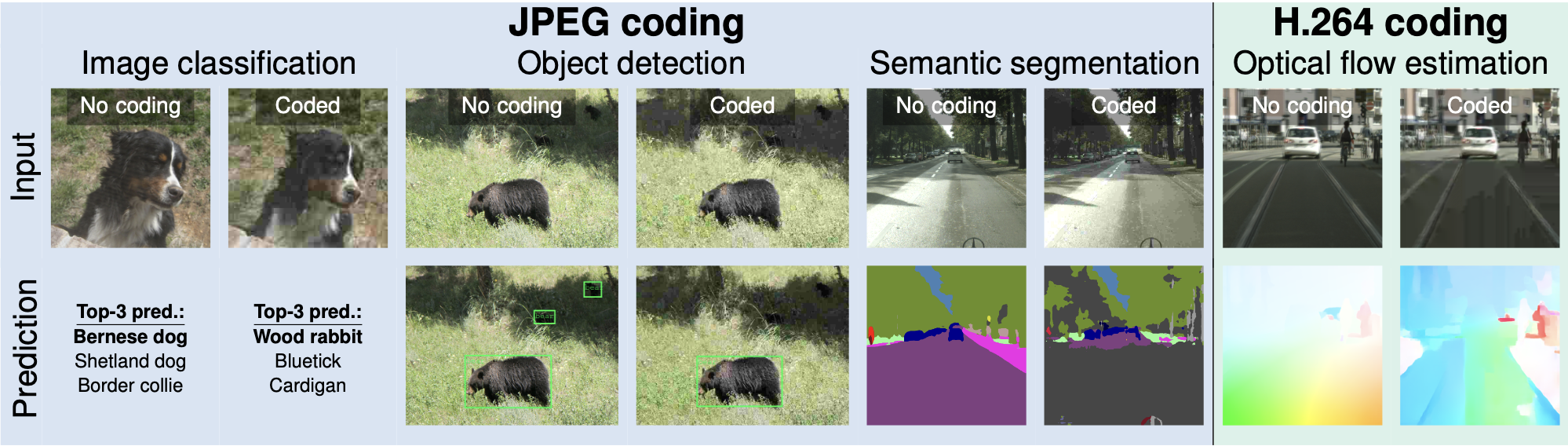
A Perspective on Deep Vision Performance with Standard Image and Video Codecs , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), in press, 2024.
[] 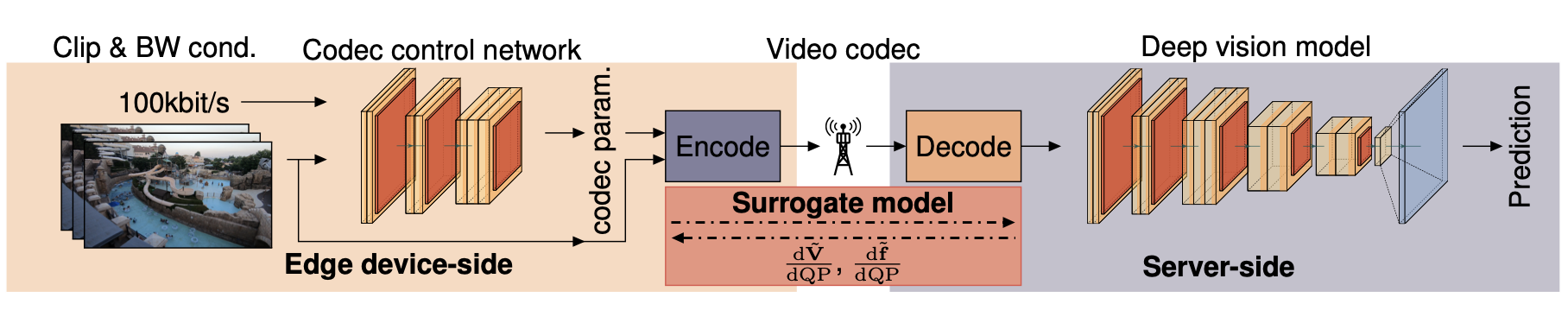
Deep Video Codec Control , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), in press, 2024.
[] 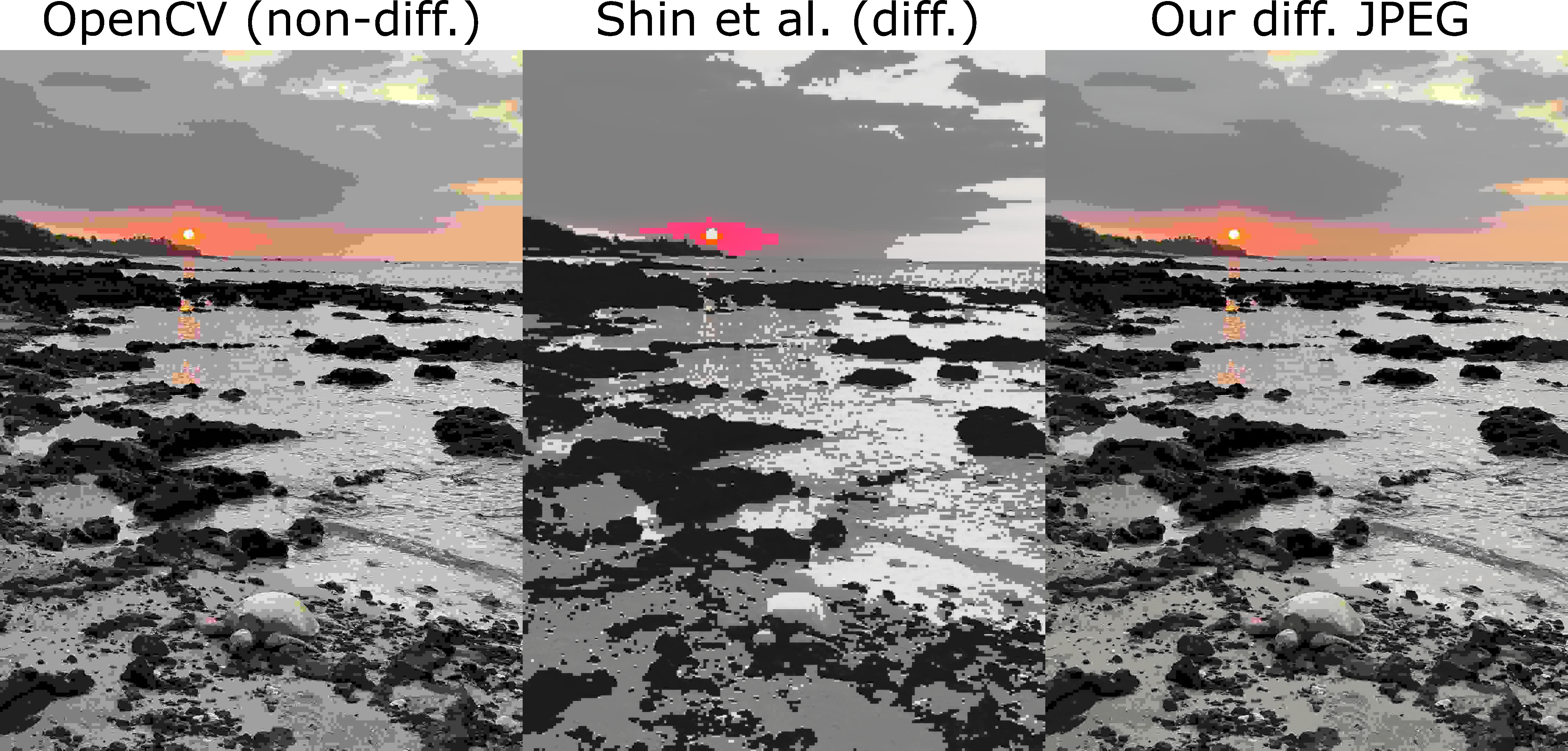
Differentiable JPEG: The Devil is in the Details , In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024. ([project page])
[] An Analytical Solution to Gauss-Newton Loss for Direct Image Alignment , In International Conference on Learning Representations (ICLR), 2024. (To appear)
Oral Presentation [] 
Cache Me if You Can: Accelerating Diffusion Models through Block Caching , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024. ([project page])
[] 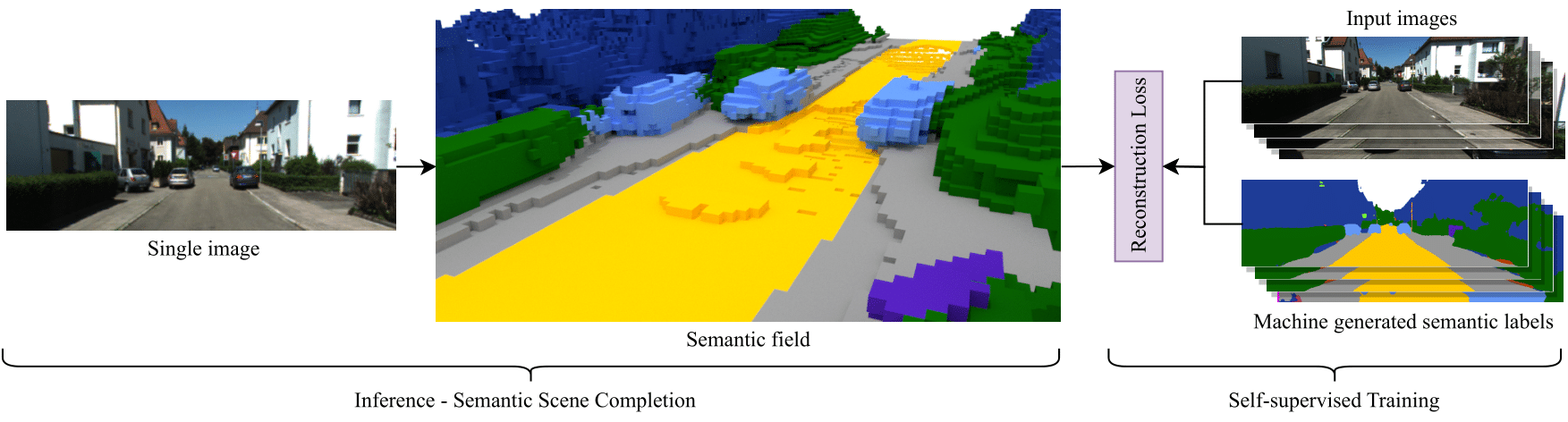
S4C: Self-Supervised Semantic Scene Completion with Neural Fields , In 2024 International Conference on 3D Vision (3DV), 2024. ([project page])
[] 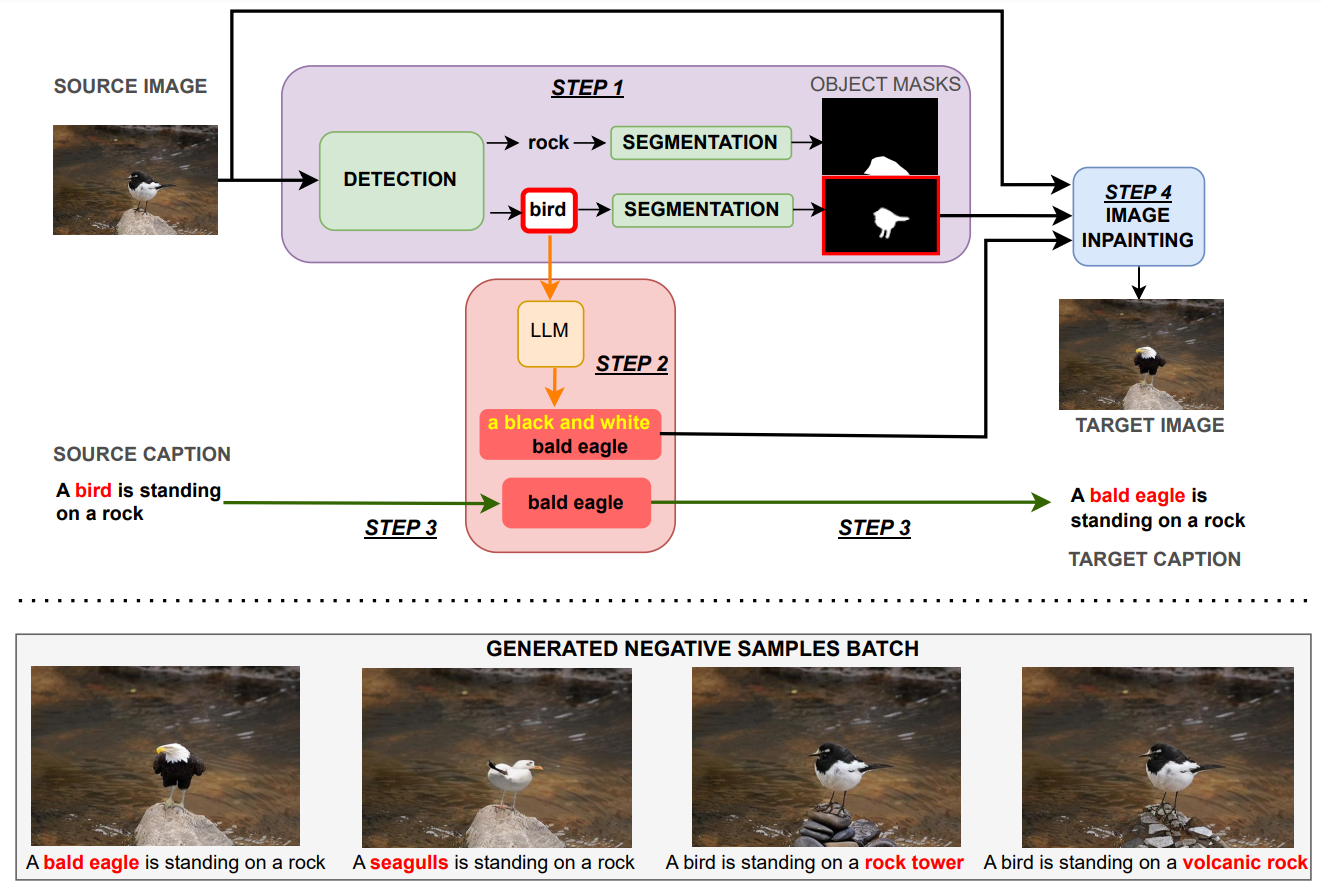
Enhancing Multimodal Compositional Reasoning of Visual Language Models with Generative Negative Mining , In IEEE Winter Conference on Applications of Computer Vision (WACV, 2024. ([arXiv][project page][code])
[] 
HoloNets: Spectral Convolutions do extend to Directed Graphs , In International Conference on Learning Representations (ICLR), 2024.
[] Text2Loc: 3D Point Cloud Localization from Natural Language , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024. ([project page])
[] 
Masked Event Modeling: Self-Supervised Pretraining for Event Cameras , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2024.
[] FIRe: Fast Inverse Rendering Using Directional and Signed Distance Functions , In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2024. ([Project page],[ArXiv])
[] 
SupeRVol: Super-Resolution Shape and Reflectance Estimation in Inverse Volume Rendering , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2024. ([supp])
2023
[] 
Transformer Network with Time Prior for Predicting Clinical Outcome from EEG of Cardiac Arrest Patients , In 50th Computing in Cardiology Conference (CinC), 2023.
[] 
On the Atrial Fibrillation Detection Performance of ECG-DualNet , In 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 1-Page Paper, medRxiv, 2023.
[] 
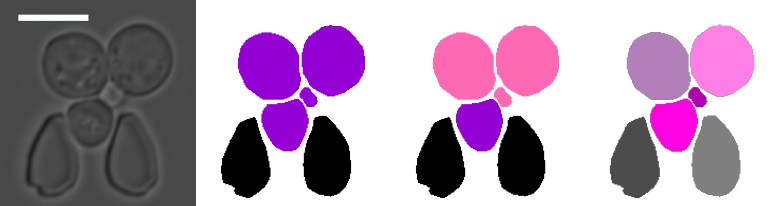
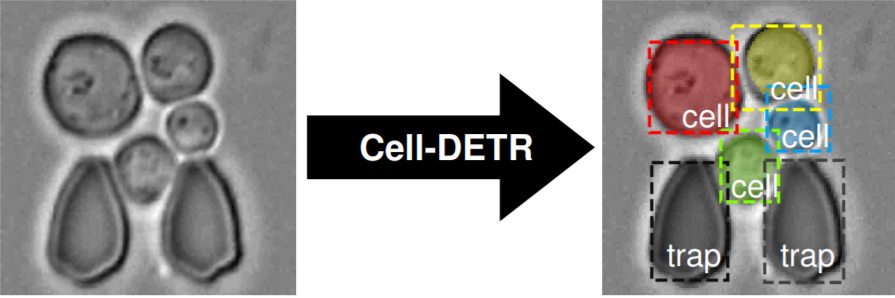
The TYC Dataset for Understanding Instance-Level Semantics and Motions of Cells in Microstructures , In IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), 2023. ([project page])
[] 
An Instance Segmentation Dataset of Yeast Cells in Microstructures , In 45th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), 2023. ([project page])
[] 
SIGMA: Quantum Scale-Invariant Global Sparse Shape Matching , In International Conference on Computer Vision (ICCV), 2023. ([pdf])
[] 
Learning Expressive Priors for Generalization and Uncertainty Estimation in Neural Networks , In International Conference on Machine Learning, 2023.
[] 
ResolvNet: A Graph Convolutional Network with multi-scale Consistency , In NeurIPS 2023 Workshop: New Frontiers in Graph Learning, 2023.
Oral Presentation [] 
HoloNets: Spectral Convolutions do extend to Directed Graphs , In NeurIPS 2023 Workshop: New Frontiers in Graph Learning, 2023.
Oral Presentation [] 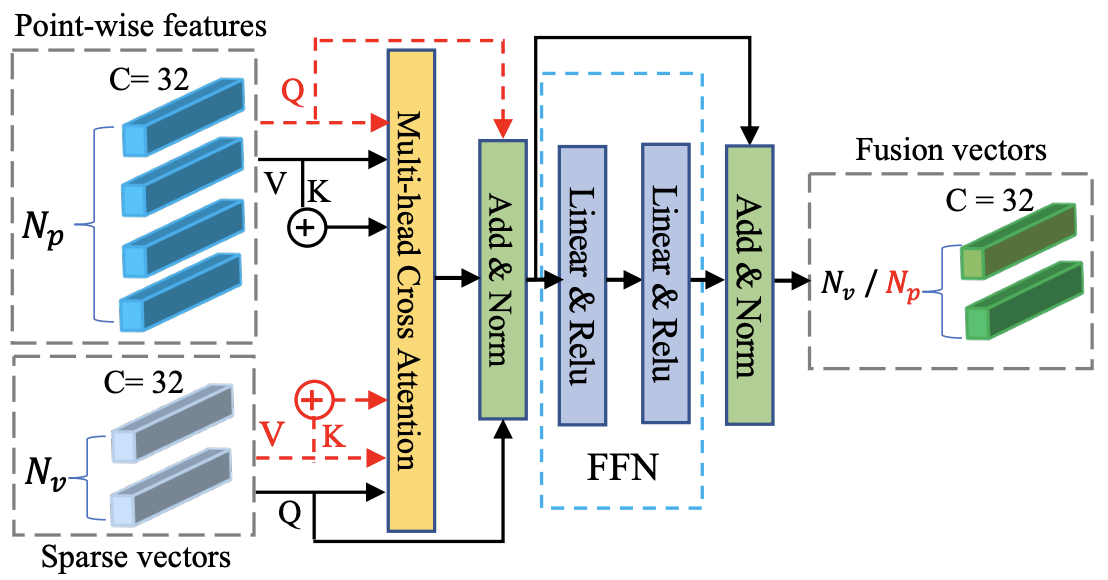
CASSPR: Cross Attention Single Scan Place Recognition , In IEEE International Conference on Computer Vision (ICCV), 2023. ([code])
[] 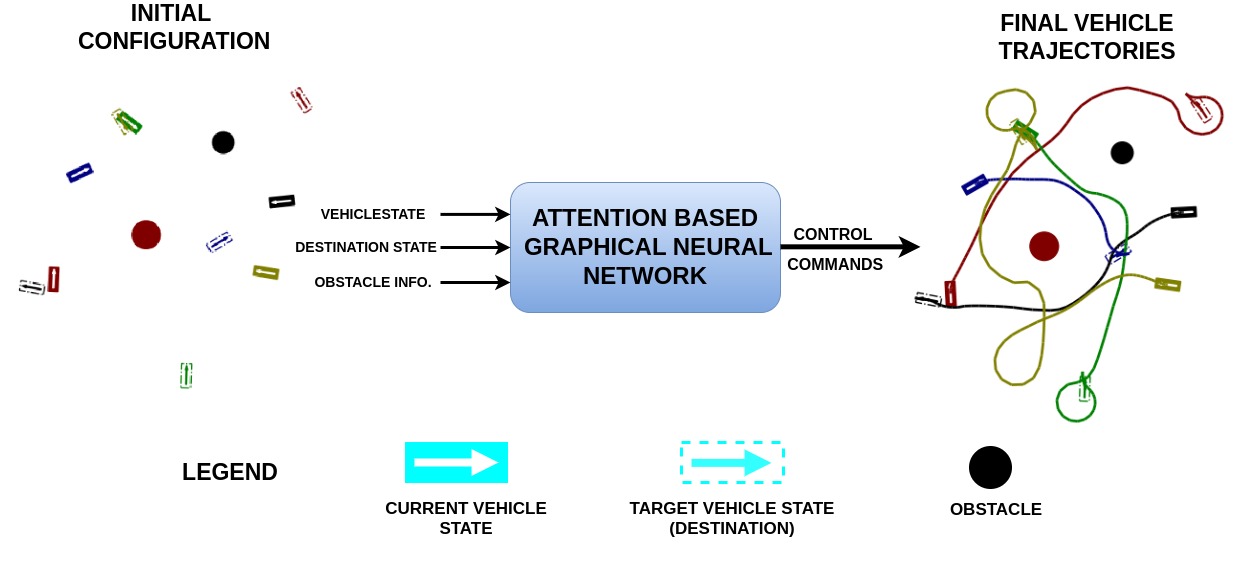
Multi Agent Navigation in Unconstrained Environments Using a Centralized Attention Based Graphical Neural Network Controller , In IEEE 26th International Conference on Intelligent Transportation Systems, 2023. ([project page][code])
[] 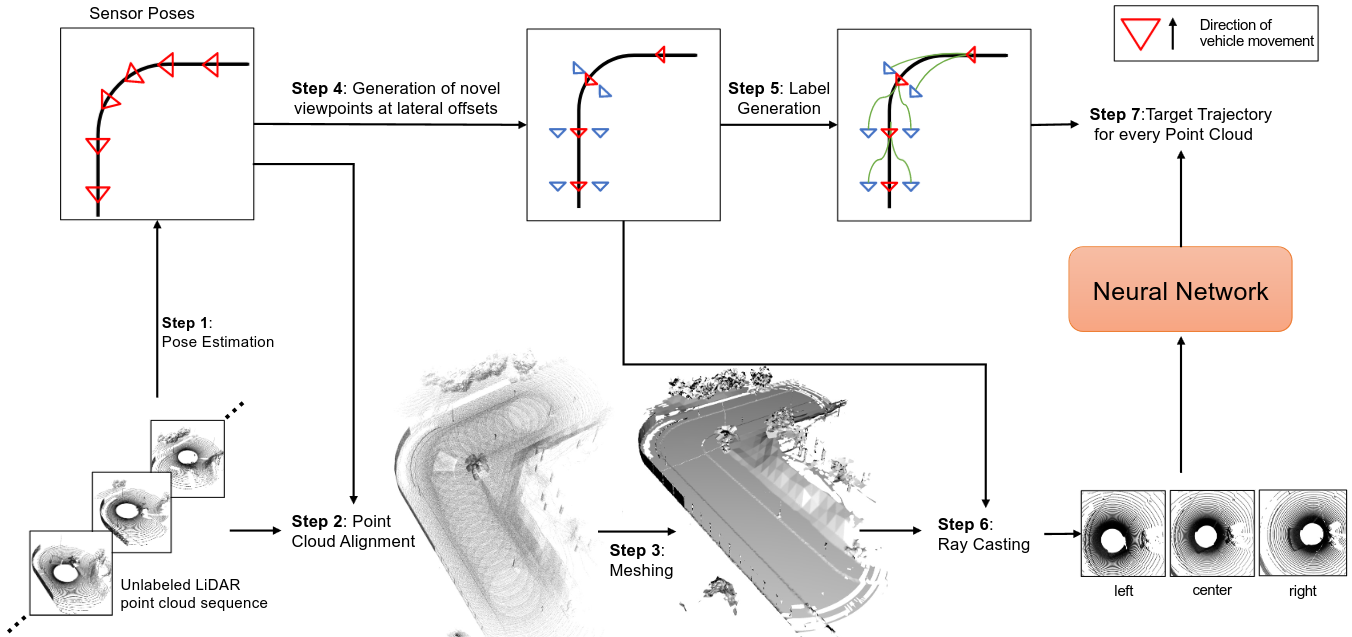
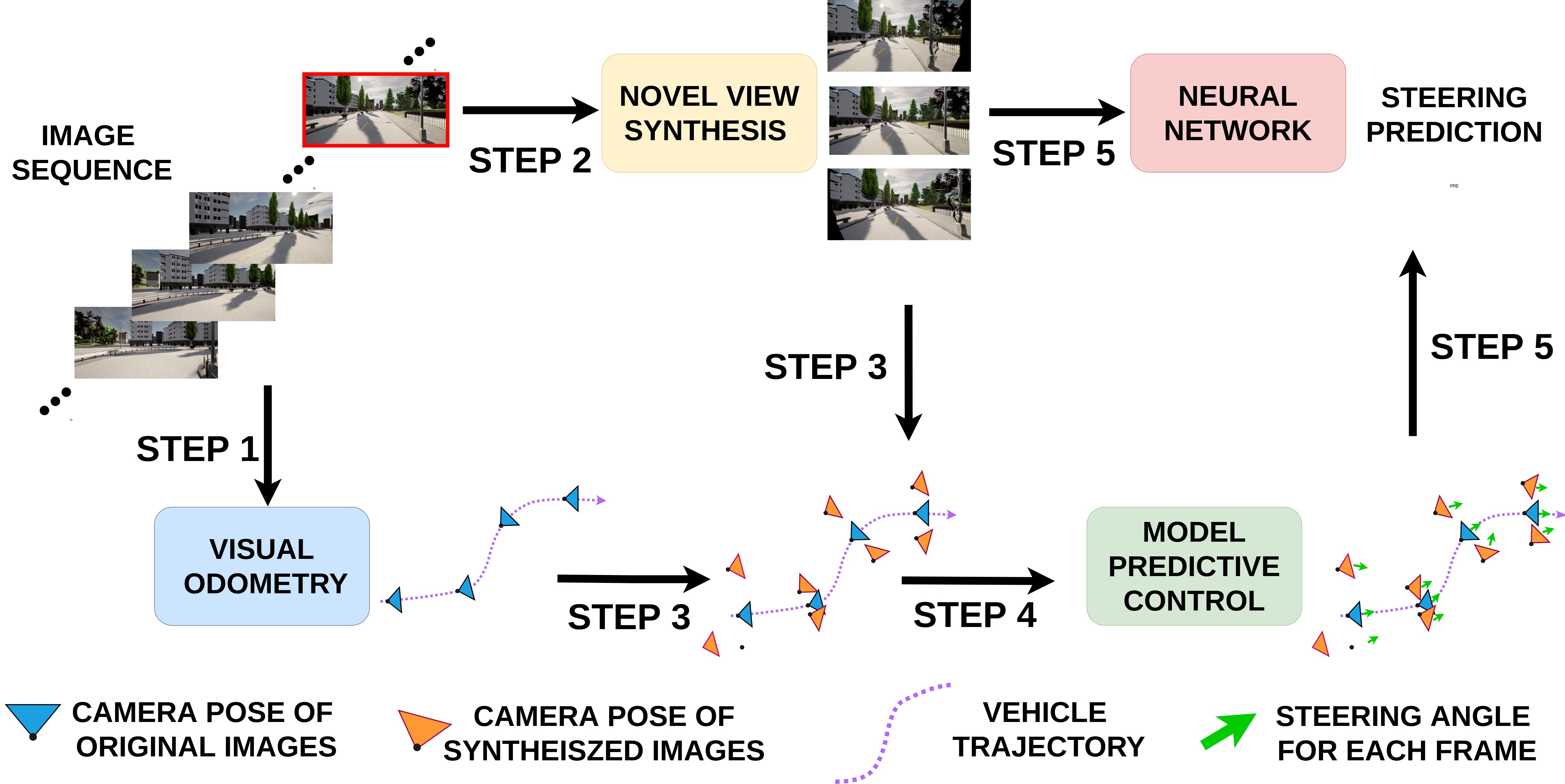
LiDAR View Synthesis for Robust Vehicle Navigation Without Expert Labels , In IEEE 26th International Conference on Intelligent Transportation Systems, 2023. ([project page][arxiv][code])
[] 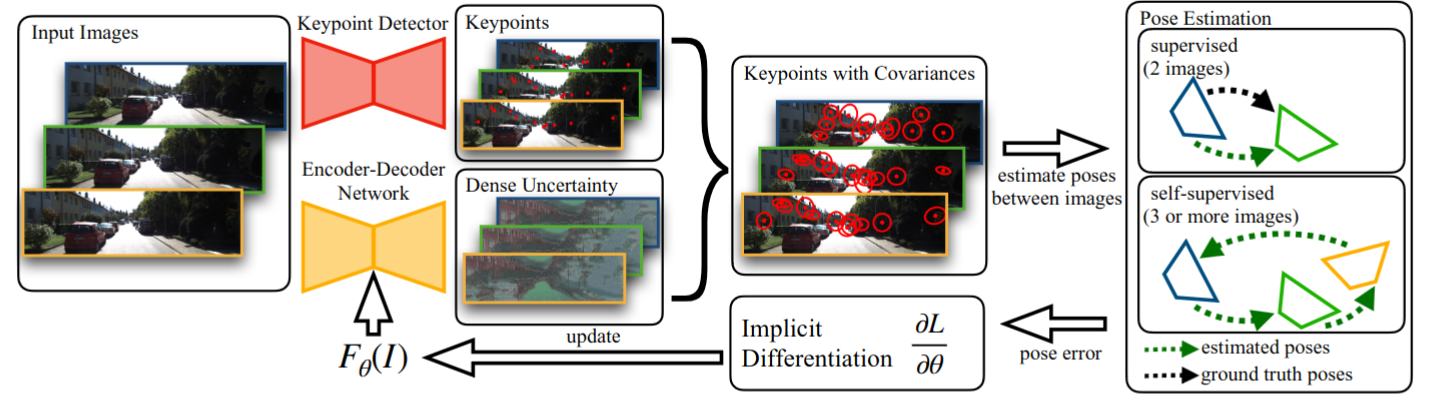
Learning Correspondence Uncertainty via Differentiable Nonlinear Least Squares , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023. ([project page])
[] 
Non-Separable Multi-Dimensional Network Flows for Visual Computing , In Eurographics 2023 - Posters, The Eurographics Association, 2023.
[] 
GPT4MR: Exploring GPT-4 as an MR Sequence and Reconstruction Programming Assistant , In European Society for Magnetic Resonance in Medicine and Biology (ESMRMB) Annual Meeting, 2023.
Oral Presentation [] 
Limitless Stability for Graph Convolutional Networks , In International Conference on Learning Representations (ICLR), 2023.
[] 
NIFF: Alleviating Forgetting in Generalized Few-Shot Object Detection via Neural Instance Feature Forging , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
[] 
Behind the Scenes: Density Fields for Single View Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023. ([project page])
[] 
Power Bundle Adjustment for Large-Scale 3D Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023. ([project page][video])
[] 
Semidefinite Relaxations for Robust Multiview Triangulation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
[] 
High-Quality RGB-D Reconstruction via Multi-View Uncalibrated Photometric Stereo and Gradient-SDF , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2023. ([code] )
Spotlight Presentation [] 
Neural Implicit Representations for Physical Parameter Inference from a Single Video , In IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), 2023. ([project page])
[] Beyond In-Domain Scenarios: Robust Density-Aware Calibration , In Proceedings of the 40th International Conference on Machine Learning (ICML), 2023.
[] 
G-MSM: Unsupervised Multi-Shape Matching with Graph-based Affinity Priors , In IEEE International Conference on Computer Vision and Pattern Recognition (CVPR), 2023. ([arXiv] [code])
2022
[] 
Histopathological Image Classification based on Self-Supervised Vision Transformer and Weak Labels , In Medical Imaging 2022: Digital and Computational Pathology, Proceedings of SPIE, volume 12039, 2022.
[] 
A scalable combinatorial solver for elastic geometrically consistent 3d shape matching , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022.
[] 
Graph Scattering beyond Wavelet Shackles , In Neural Information Processing Systems Conference (NeurIPS), 2022.
[] 
A Graph Is More Than Its Nodes: Towards Structured Uncertainty-Aware Learning on Graphs , In NeurIPS 2022 Workshop: New Frontiers in Graph Learning, 2022. ([code])
[] 
Deep Combinatorial Aggregation , In NeurIPS, 2022. ([code])
[] 
What Makes Graph Neural Networks Miscalibrated? , In NeurIPS, 2022. ([code])
[] ![]()
DirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment , In International Conference on Intelligent Robots and Systems (IROS), 2022. ([project page])
[] Challenges of SLAM in extremely unstructured environments: the DLR Planetary Stereo, Solid-State LiDAR, Inertial Dataset , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] The Probabilistic Robot Kinematics Model and its Application to Sensor Fusion , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] Bayesian Active Learning for Sim-to-Real Robotic Perception , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] A Two-stage Learning Architecture that Generates High-Quality Grasps for a Multi-Fingered Hand , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] RECALL: Rehearsal-free Continual Learning for Object Classification , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] Towards Safety-Aware Pedestrian Detection in Autonomous Systems , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] Towards Robust Perception of Unknown Objects in the Wild , In ICRA Workshop on Robotic Perception and Mapping: Emerging Techniques, 2022.
[] Iterative Corresponding Geometry: Fusing Region and Depth for Highly Efficient 3D Tracking of Textureless Objects , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
[] Seeking Visual Discomfort: Curiosity-Driven Representations for Reinforcement Learning , In International Conference on Robotics and Automation (ICRA), 2022.
[] A Model for Multi-View Residual Covariances Based on Perspective Deformation , In International Conference on Robotics and Automation (ICRA), 2022.
[] 
Intrinsic Neural Fields: Learning Functions on Manifolds , In European Conference on Computer Vision (ECCV), 2022. (Code will be released soon.)
[] 
Ventriloquist-Net: Leveraging Speech Cues for Emotive Talking Head Generation , In IEEE International Conference on Image Processing, 2022.
[] 
Biologically Inspired Neural Path Finding , In Brain Informatics, Springer International Publishing, 2022. ([code])
[] 
Lateral Ego-Vehicle Control Without Supervision Using Point Clouds , In Pattern Recognition and Artificial Intelligence, Springer International Publishing, 2022.
[] 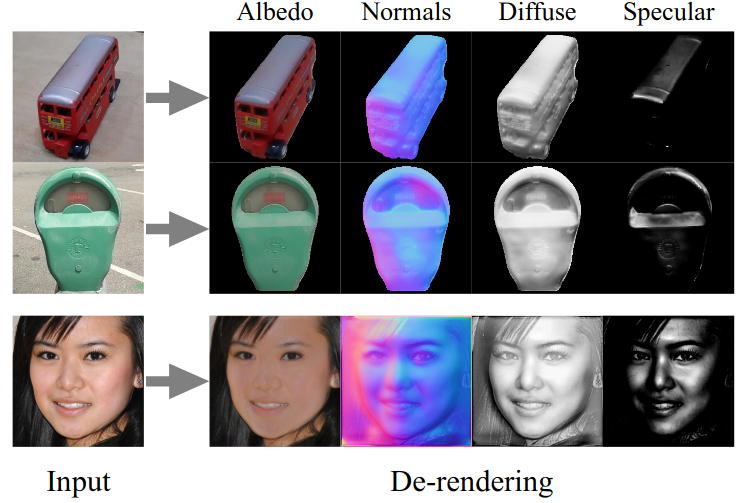
De-rendering 3D Objects in the Wild , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
[] 
The Probabilistic Normal Epipolar Constraint for Frame-To-Frame Rotation Optimization under Uncertain Feature Positions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([project page])
[] 
Joint Deep Multi-Graph Matching and 3D Geometry Learning from Inhomogeneous 2D Image Collections , In AAAI, 2022. ([supp])
[] 
Gradient-SDF: A Semi-Implicit Surface Representation for 3D Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([poster] [presentation] [code])
[] 
A data-driven variability assessment of brain diffusion MRI preprocessing pipelines , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2022.
Oral Presentation [] 
Parameterized Temperature Scaling for Boosting the Expressive Power in Post-Hoc Uncertainty Calibration , In European Conference on Computer Vision (ECCV), 2022.
[] 
A Unified Framework for Implicit Sinkhorn Differentiation , In IEEE International Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([arXiv] [code])
[] 
DynamicEarthNet: Daily Multi-Spectral Satellite Dataset for Semantic Change Segmentation , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
2021
[] 
OSS-Net: Memory Efficient High Resolution Semantic Segmentation of 3D Medical Data , In British Machine Vision Conference (BMVC), 2021. ([project page])
[] 
Multi-StyleGAN: Towards Image-Based Simulation of Time-Lapse Live-Cell Microscopy , In International Conference on Medical image computing and computer-assisted intervention (MICCAI), 2021. ([project page])
[] 4D Panoptic LiDAR Segmentation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021.
[] STEP: Segmenting and Tracking Every Pixel , In Proceedings of the Neural Information Processing Systems Track on Datasets and Benchmarks (NeurIPS Track on Datasets and Benchmarks), volume 1, 2021.
[] 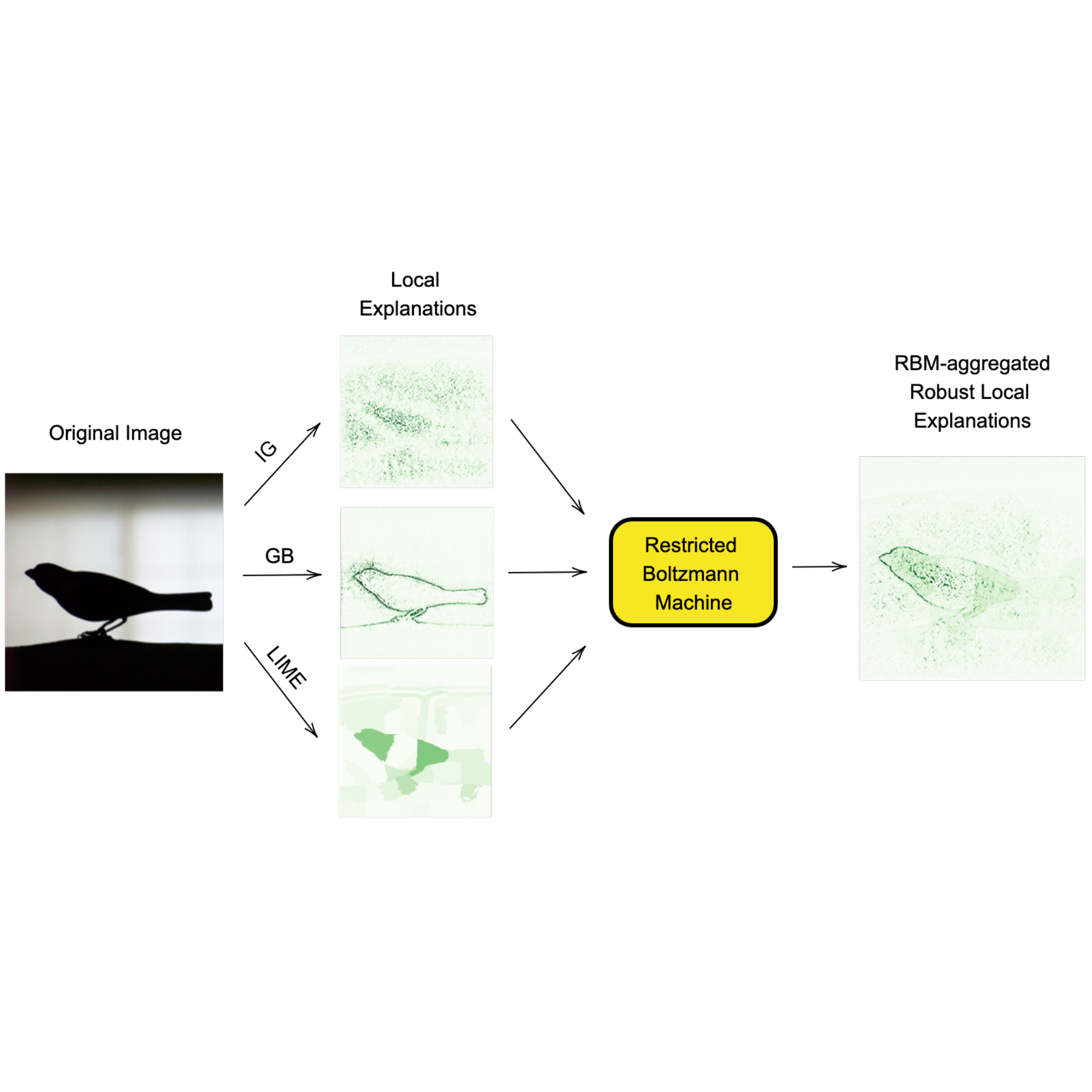
A Robust Unsupervised Ensemble of Feature-Based Explanations using Restricted Boltzmann Machines , In Neural Information Processing Systems Conference - NeurIPS 2021: eXplainable AI approaches for debugging and diagnosis workshop, 2021.
[] 
Shortest Paths in Graphs with Matrix-Valued Edges: Concepts, Algorithm and Application to 3D Multi-Shape Analysis , In 2021 International Conference on 3D Vision (3DV), 2021.
[] 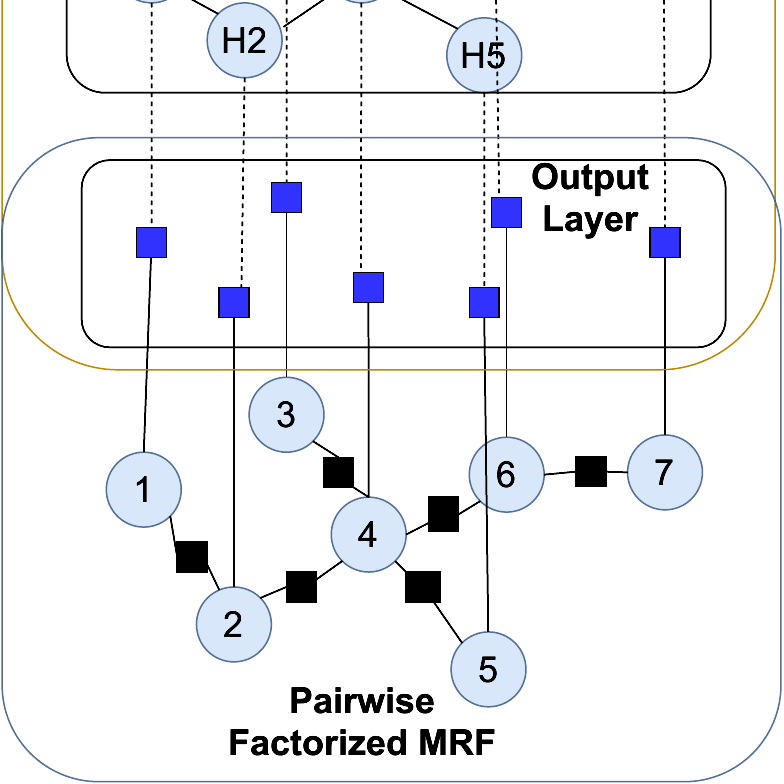
Explicit pairwise factorized graph neural network for semi-supervised node classification , In UAI, 2021. ([code])
[] A Photorealistic Terrain Simulation Pipeline for Unstructured Outdoor Environments , In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[] Instance Segmentation in CARLA: Methodology and Analysis for Pedestrian-oriented Synthetic Data Generation in Crowded Scenes , In 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), IEEE, 2021.
[] Unknown Object Segmentation from Stereo Images , In International Conference on Intelligent Robots and Systems, 2021.
[] Multi-Modal Loop Closing in Unstructured Planetary Environments with Visually Enriched Submaps , In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[] Learning-Based Matching of 3D Submaps from Dense Stereo for Planetary-Like Environments , In International Conference on Advanced Robotics (ICAR), 2021.
[] 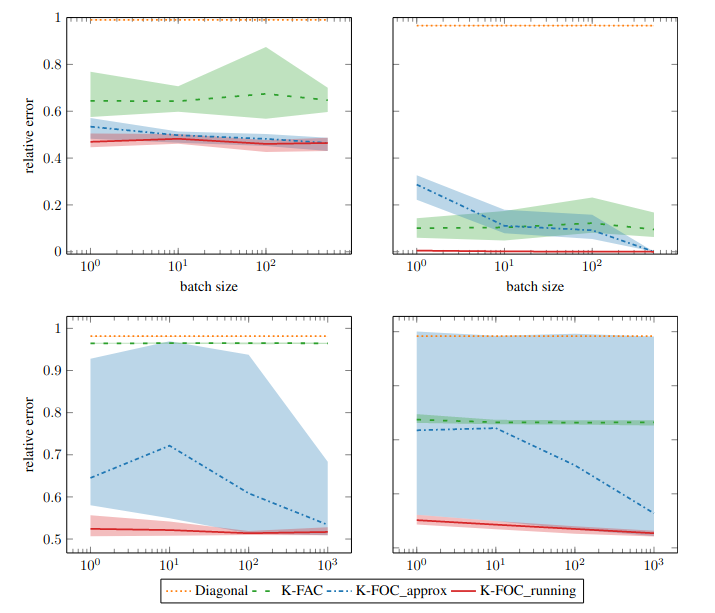
Kronecker-Factored Optimal Curvature , In Bayesian Deep Learning NeurIPS 2021 Workshop, 2021. ([poster])
[] Trust Your Robots! Predictive Uncertainty Estimation of Neural Networks with Sparse Gaussian Processes , In 5th Conference on Robot Learning (CoRL), 2021.
[] 
Multidirectional Conjugate Gradients for Scalable Bundle Adjustment , In German Conference on Pattern Recognition (GCPR), 2021. ([presentation])
Oral Presentation [] 
TANDEM: Tracking and Dense Mapping in Real-time using Deep Multi-view Stereo , In Conference on Robot Learning (CoRL), 2021. ([GitHub][video][project page])
3DV'21 Best Demo Award [] 
TUM-VIE: The TUM Stereo Visual-Inertial Event Dataset , In International Conference on Intelligent Robots and Systems (IROS), 2021. ([project page])
[] 
Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions , In International Conference on Intelligent Robots and Systems (IROS), 2021. ([code][video])
[] 
Square Root Marginalization for Sliding-Window Bundle Adjustment , In IEEE International Conference on Computer Vision (ICCV), 2021. ([project page])
[] From Evaluation to Verification: Towards Task-Oriented Relevance Metrics for Pedestrian Detection in Safety-Critical Domains , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2021.
[] 
Post-hoc Uncertainty Calibration for Domain Drift Scenarios , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021.
Oral Presentation [] 
Towards Trustworthy Predictions from Deep Neural Networks with Fast Adversarial Calibration , In InThirty-FifthAAAIConferenceonArtificialIntelligence(AAAI-2021), 2021.
[] 
Square Root Bundle Adjustment for Large-Scale Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
[] 
DOT: Dynamic Object Tracking for Visual SLAM , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
Contact-GraspNet: Efficient 6-DoF Grasp Generation in Cluttered Scenes , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
"What's This?" - Learning to Segment Unknown Objects from Manipulation Sequences , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
Exploration of Large Outdoor Environments Using Multi-Criteria Decision Making , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
Learning to Localize in New Environments from Synthetic Training Data , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] Robust Approaches for Localization on Multi-camera Systems in Dynamic Environments , In Proceedings of the IEEE International Conference on Automation, Robotics and Applications(ICARA), 2021.
[] 
Vision-Based Mobile Robotics Obstacle Avoidance With Deep Reinforcement Learning , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021. ([arXiv])
[] 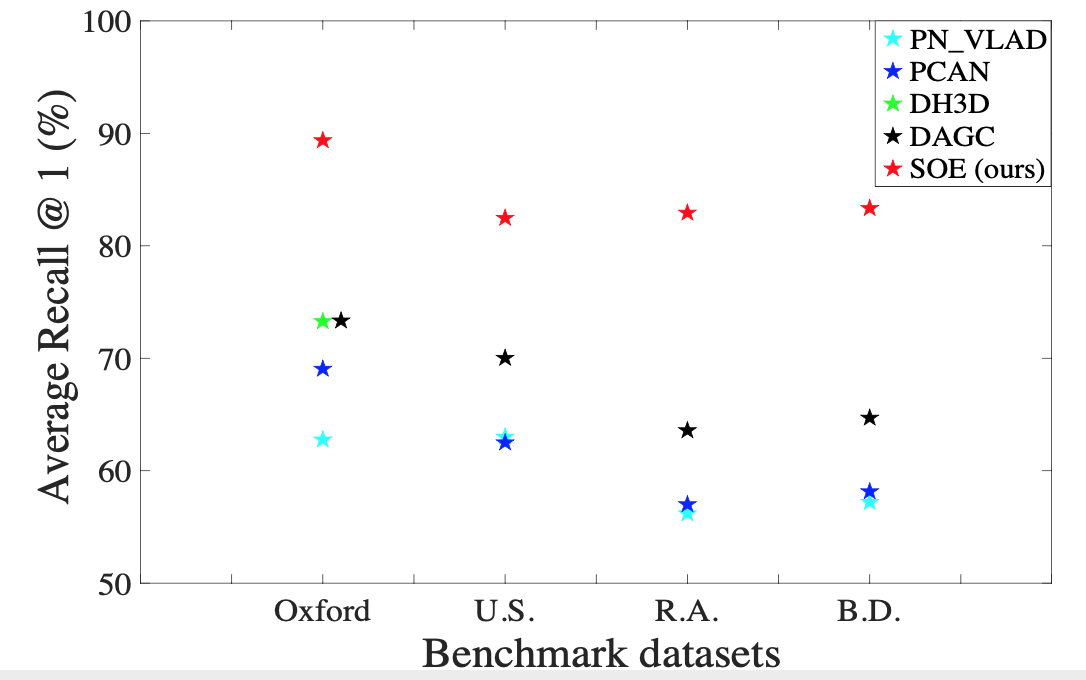
SOE-Net: A Self-Attention and Orientation Encoding Network for Point Cloud based Place Recognition , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([arxiv])
Oral Presentation [] 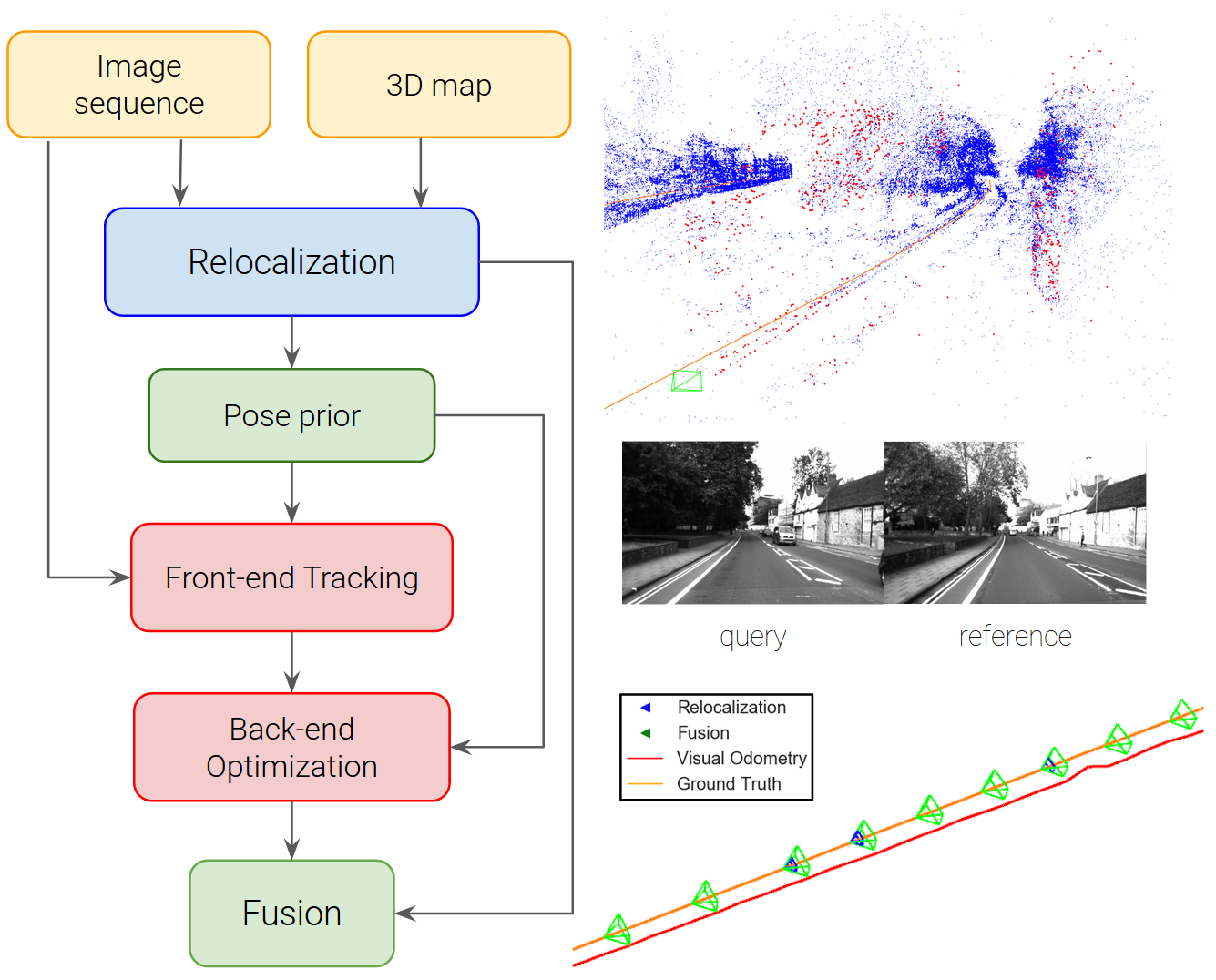
Tight Integration of Feature-based Relocalization in Monocular Direct Visual Odometry , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2021. ([project page])
[] 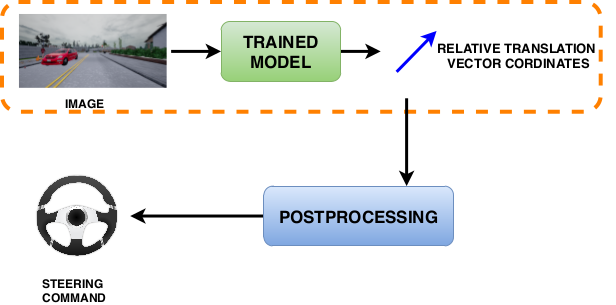
Self-Supervised Steering Angle Prediction for Vehicle Control Using Visual Odometry , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2021. ([arXiv])
[] 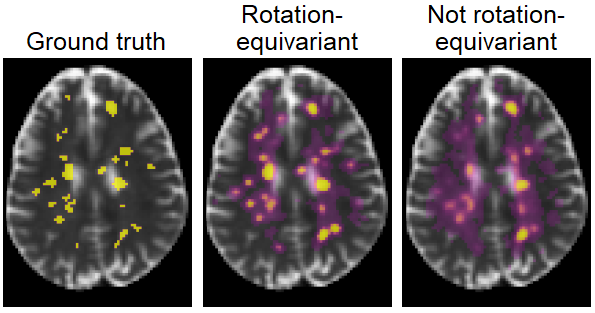
Rotation-Equivariant Deep Learning for Diffusion MRI (short version) , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2021.
[] 
Faster and better HARDI using FSE and holistic reconstruction , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2021.
[] 
Isometric Multi-Shape Matching , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([arxiv])
Oral Presentation [] i3DMM: Deep Implicit 3D Morphable Model of Human Heads , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([Project page],[ArXiv])
Oral Presentation [] 
MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
[] 
Sublabel-Accurate Multilabeling Meets Product Label Spaces , In DAGM German Conference on Pattern Recognition (GCPR), 2021. ([presentation] [code])
Oral Presentation [] Bregman Proximal Gradient Algorithms for Deep Matrix Factorization , In Scale Space and Variational Methods in Computer Vision (A Elmoataz, J Fadili, Y Quéau, J Rabin, L Simon, eds.), Springer International Publishing, 2021.
[] 
NeuroMorph: Unsupervised Shape Interpolation and Correspondence in One Go , In IEEE International Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([arXiv] [code])
[] 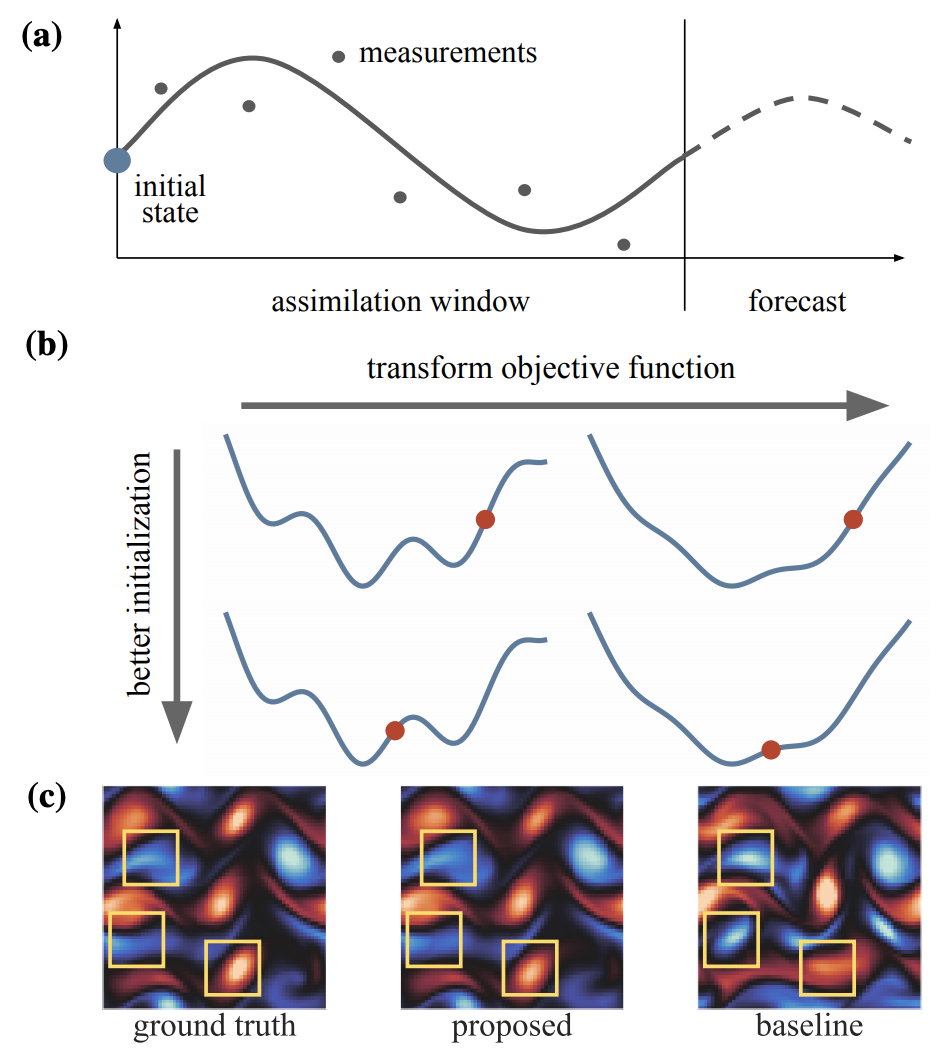
Variational Data Assimilation with a Learned Inverse Observation Operator , In Proceedings of the 38th International Conference on Machine Learning (ICML), 2021. (URL, code)
[] 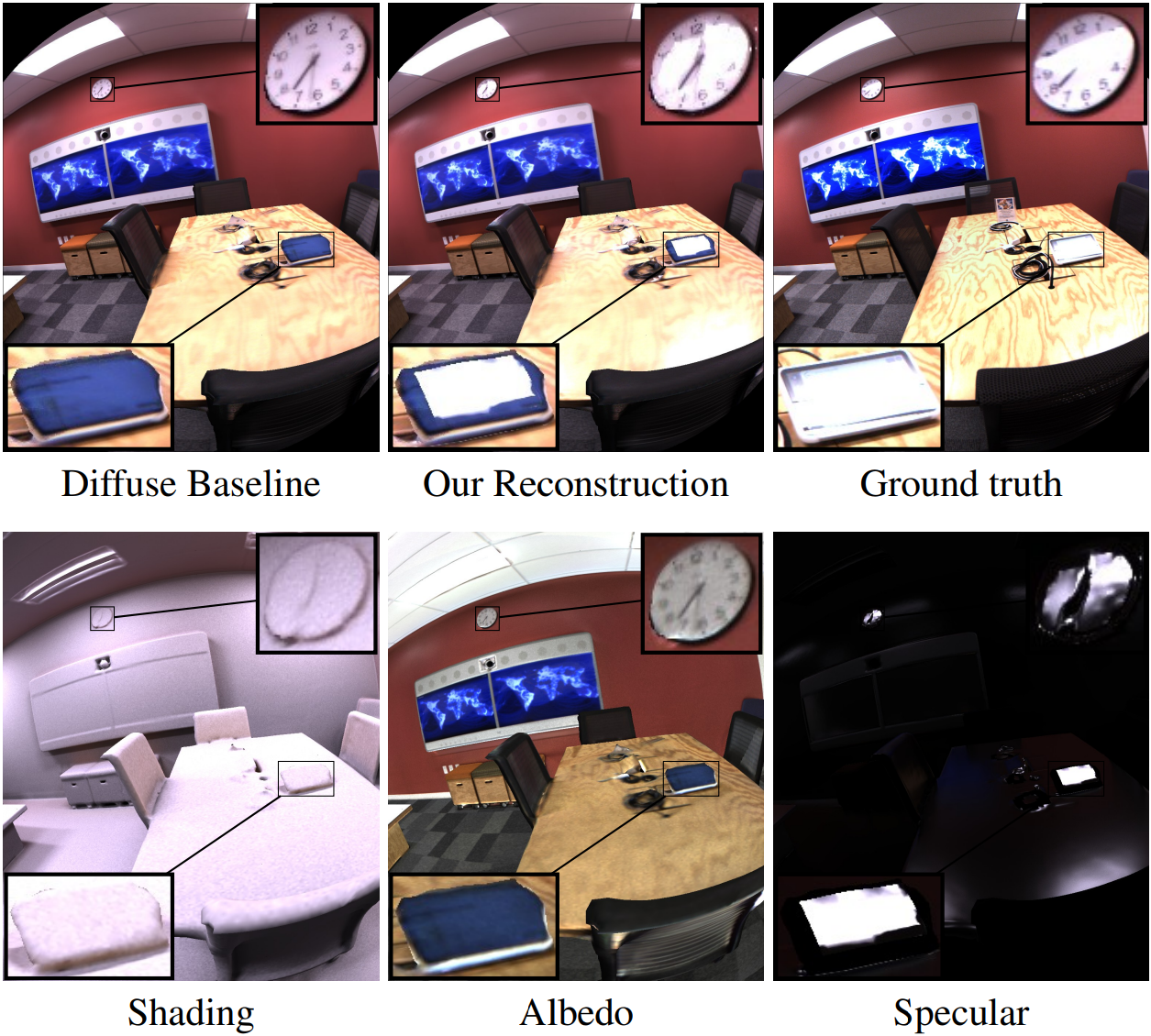
Recovering Real-world Reflectance Properties and Shading from HDR Imagery , In International Conference on 3D Vision (3DV), 2021. ([supp] [slides] [poster] [FB Research] [video])
Spotlight Presentation
2020
[] 
Multiclass Yeast Segmentation in Microstructured Environments with Deep Learning , In 2020 IEEE Conference on Computational Intelligence in Bioinformatics and Computational Biology (CIBCB), 2020.
[] 
Attention-Based Transformers for Instance Segmentation of Cells in Microstructures , In 2020 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), 2020.
[] 4D generic video object proposals , In International Conference on Robotics and Automation (ICRA), 2020.
[] Single-Shot Panoptic Segmentation , In International Conference on Intelligent Robots and Systems (IROS), 2020.
[] 
Optimal least-squares solution to the hand-eye calibration problem , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
[] 
LM-Reloc: Levenberg-Marquardt Based Direct Visual Relocalization , In International Conference on 3D Vision (3DV), 2020. ([arXiv][project page][video][supplementary][poster])
[] 
Distributed Photometric Bundle Adjustment , In International Conference on 3D Vision (3DV), 2020. ([project page][code])
Oral Presentation [] 
Robust Vision-Based Pose Correction for a Robotic Manipulator using Active Markers , In 17th International Symposium on Experimental Robotics (ISER), 2020. (to appear)
[] 
A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking , In Asian Conference on Computer Vision, 2020. ()
Best Paper Award [] 
Incremental learning of EMG-based control commands using Gaussian Processes , In Conference on Robot Learning (CoRL), 2020. ()
[] 
Self-Supervised Object-in-Gripper Segmentation from Robotic Motions , In Conference on Robot Learning (CoRL), 2020. ()
[] 
Unsupervised Dense Shape Correspondence using Heat Kernels , In International Conference on 3D Vision (3DV), 2020. ([arxiv])
[] 
Simulated Annealing for 3D Shape Correspondence , In International Conference on 3D Vision (3DV), 2020.
Oral Presentation [] 
4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([project page][arXiv][video])
[] 
Learning Monocular 3D Vehicle Detection without 3D Bounding Box Labels , In Proceedings of the German Conference on Pattern Recognition (GCPR), 2020. ([project page][video])
[] 
PrimiTect: Fast Continuous Hough Voting for Primitive Detection , In International Conference on Robotics and Automation (ICRA), 2020.
[] 
Gaussian Process Gradient Maps for Loop-Closure Detection in Unstructured Planetary Environments , In International Conference on Intelligent Robots and Systems (IROS), 2020. (to appear)
[] 
Robust MUSIC-Based Sound Source Localization in Reverberant and Echoic Environments , In International Conference on Intelligent Robots and Systems (IROS), 2020. (to appear)
[] 
DH3D: Deep Hierarchical 3D Descriptors for Robust Large-Scale 6DoF Relocalization , In European Conference on Computer Vision (ECCV), 2020. ([project page][code][supplementary][arxiv])
Spotlight Presentation [] 
3D Scene Reconstruction from a Single Viewport , In European Conference on Computer Vision (ECCV), 2020.
[] 
Effective Version Space Reduction for Convolutional Neural Networks , In European Conference on Machine Learning and Data Mining (ECML-PKDD), 2020. ([arxiv])
[] 
Estimating Model Uncertainty of Neural Networks in Sparse Information Form , In International Conference on Machine Learning (ICML), 2020.
[] 
Optimization of Graph Total Variation via Active-Set-based Combinatorial Reconditioning , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2020. ([code])
[] 
Visual-Inertial Telepresence for Aerial Manipulation , In International Conference on Robotics and Automation (ICRA), 2020.
[] 
Non-Parametric Calibration for Classification , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2020.
[] 
Multi-path Learning for Object Pose Estimation Across Domains , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
[] 
Information-Driven Direct RGB-D Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation [] 
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation [] 
Efficient Derivative Computation for Cumulative B-Splines on Lie Groups , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation [] 
Correspondence-Free Material Reconstruction using Sparse Surface Constraints , In IEEE International Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
[] 
Deep Shells: Unsupervised Shape Correspondence with Optimal Transport , In 34th Conference on Neural Information Processing Systems (NeurIPS), 2020. ([arXiv] [code])
[] 
Hamiltonian Dynamics for Real-World Shape Interpolation , In European Conference on Computer Vision (ECCV), 2020. ([arXiv] [code])
Spotlight Presentation [] 
Smooth Shells: Multi-Scale Shape Registration with Functional Maps , In IEEE International Conference on Computer Vision and Pattern Recognition (CVPR), 2020. ([pdf] [arXiv] [code])
Oral Presentation [] 
DirectShape: Photometric Alignment of Shape Priors for Visual Vehicle Pose and Shape Estimation , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2020. ([video][presentation][project page][supplementary][arxiv])
[] 
Homogeneous Linear Inequality Constraints for Neural Network Activations , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2020. (URL, code)
[] 
Inferring Super-Resolution Depth from a Moving Light-Source Enhanced RGB-D Sensor: A Variational Approach , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2020. ([poster] [presentation] [code] [cvf])
Spotlight Presentation [] 
3D Deep Learning for Biological Function Prediction from Physical Fields , In International Conference on 3D Vision (3DV), 2020.
2019
[] Visual person understanding through multi-task and multi-dataset learning , In German Conference on Pattern Recognition (GCPR), 2019.
[] Introspective Robot Perception using Smoothed Predictions from Bayesian Neural Networks , In International Symposium on Robotics Research (ISRR), 2019.
[] Visual-inertial sensor fusion with a bio-inspired polarization compass for navigation of MAVs , In 11th International Micro Air Vehicle Competition and Conference (IMAV), 2019.
[] 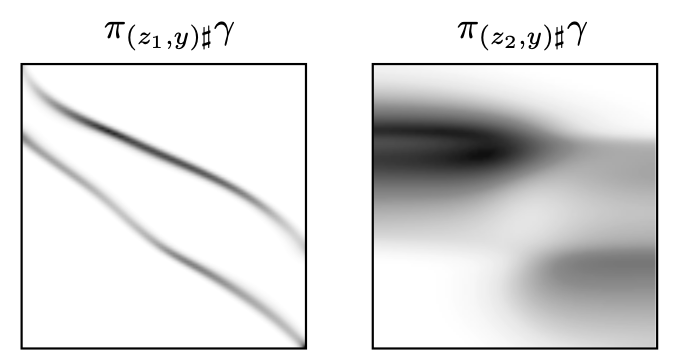
Informative GANs via Structured Regularization of Optimal Transport , In NeurIPS Workshop on Optimal Transport and Machine Learning, 2019.
[] 
Sparse Surface Constraints for Combining Physics-based Elasticity Simulation and Correspondence-Free Object Reconstruction , In arXiv preprint arXiv:1910.01812, 2019. ([pdf])
[] 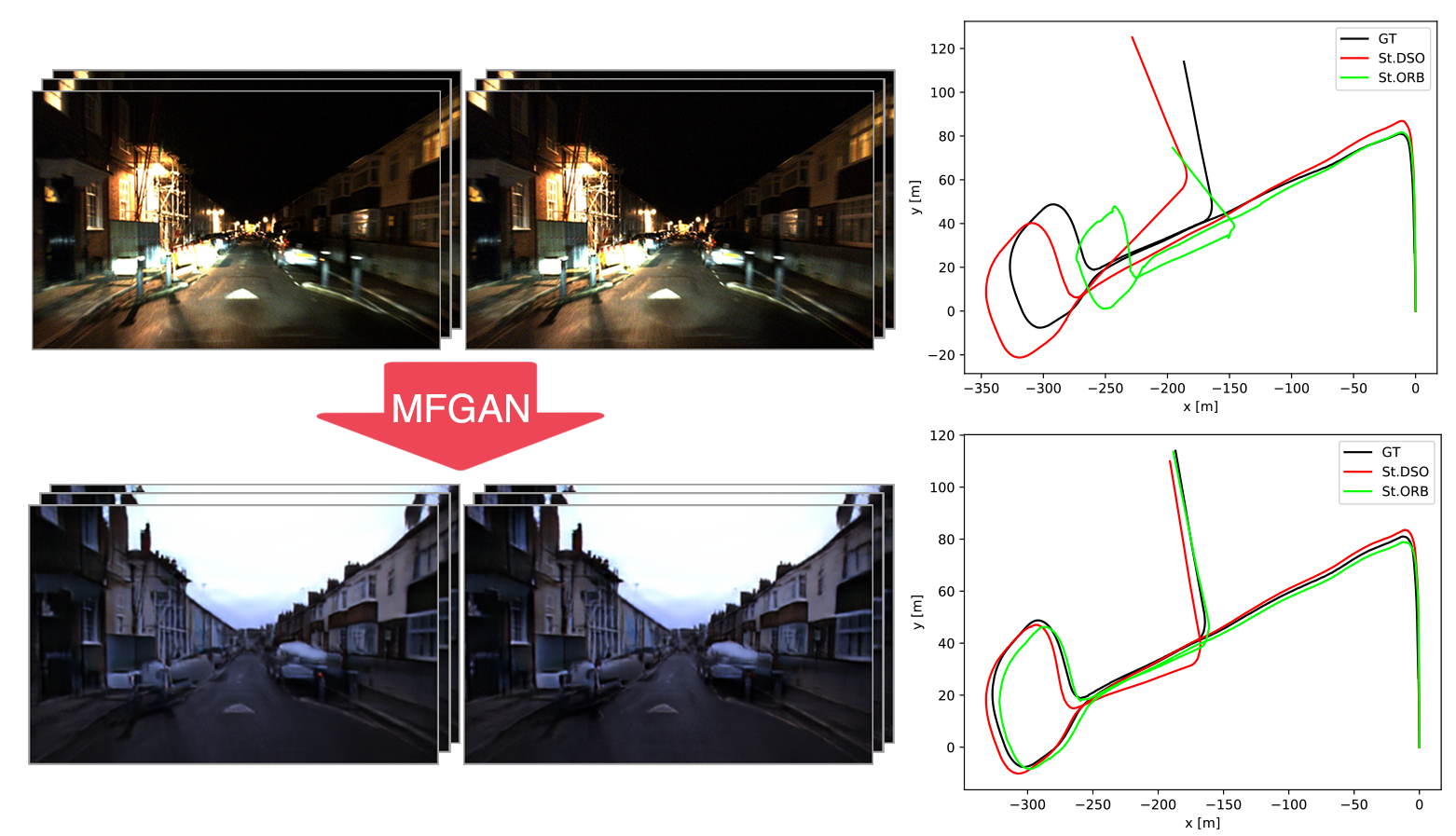
Multi-Frame GAN: Image Enhancement for Stereo Visual Odometry in Low Light , In Conference on Robot Learning (CoRL), 2019. ([arxiv],[supplementary],[video])
Full Oral Presentation [] 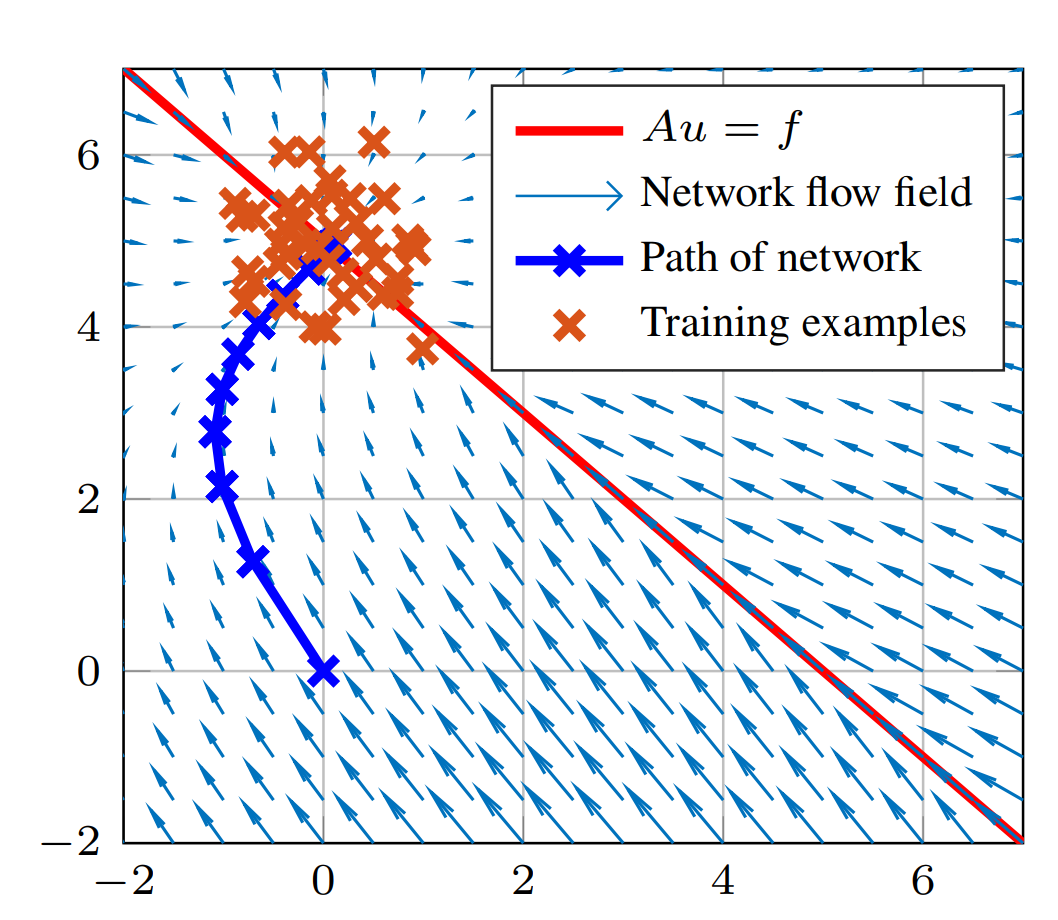
Controlling Neural Networks via Energy Dissipation , In International Conference on Computer Vision (ICCV), 2019.
[] Visual Repetition Sampling for Robot Manipulation Planning , In International Conference on Robotics and Automation (ICRA), 2019.
[] 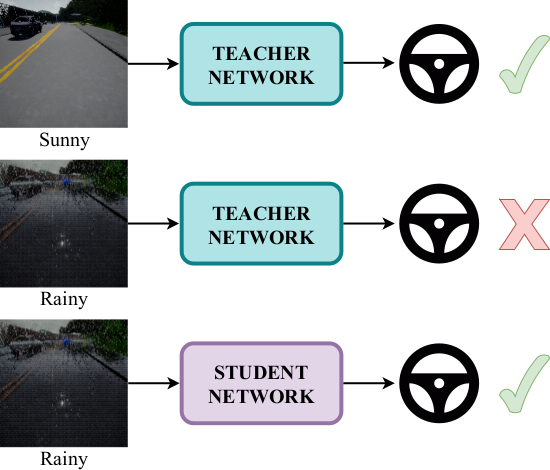
Towards Generalizing Sensorimotor Control Across Weather Conditions , In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2019. ([arXiv])
[] 
Approximating Orthogonal Matrices with Effective Givens Factorization , In Proceedings of the 36th International Conference on Machine Learning (ICML), 2019. (URL, code)
[] 
Flat Metric Minimization with Applications in Generative Modeling , In International Conference on Machine Learning (ICML), 2019. (arXiv:1905.04730, code, talk)
Full Oral Presentation [] 
Lifting Vectorial Variational Problems: A Natural Formulation based on Geometric Measure Theory and Discrete Exterior Calculus , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2019. (arXiv:1905.00851, talk)
Oral Presentation [] 
Optimization of Inf-Convolution Regularized Nonconvex Composite Problems , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2019.
[] 
Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models , In Scandinavian Conference on Image Analysis (SCIA), 2019. ([slides] [poster])
Oral Presentation, received the SCIA 2019 Honourable Mention award [] 
Divergence-Free Shape Correspondence by Deformation , In Computer Graphics Forum, volume 38, 2019. ([arxiv])
[] 
Rolling-Shutter Modelling for Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2019. ([arxiv])
[] 
Negative-Unlabeled Learning for Diffusion MRI , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2019.
[] 
q-Space Novelty Detection with Variational Autoencoders , In MICCAI 2019 International Workshop on Computational Diffusion MRI, 2019.
Oral Presentation [] Convex Optimisation for Inverse Kinematics , In 2019 International Conference on 3D Vision (3DV), 2019.
Oral Presentation [] 
Variational Uncalibrated Photometric Stereo under General Lighting , In IEEE/CVF International Conference on Computer Vision (ICCV), 2019. ([supp] [poster] [matlab] [python] [cvf])
[] 
Photometric Segmentation: Simultaneous Photometric Stereo and Masking , In International Conference on 3D Vision (3DV), 2019. ([poster] [slides])
Spotlight Presentation [] Shape Correspondence with Isometric and Non-Isometric Deformations , In 12th Eurographics Workshop on 3D Object Retrieval, 3DOR@Eurographics 2019, Genoa, Italy, May 5-6, 2019 (S Biasotti, G Lavoué, RC. Veltkamp, eds.), Eurographics Association, 2019.
2018
[] 
Modular Vehicle Control for Transferring Semantic Information Between Weather Conditions Using GANs , In Conference on Robot Learning (CoRL), 2018. ([arXiv][videos][poster])
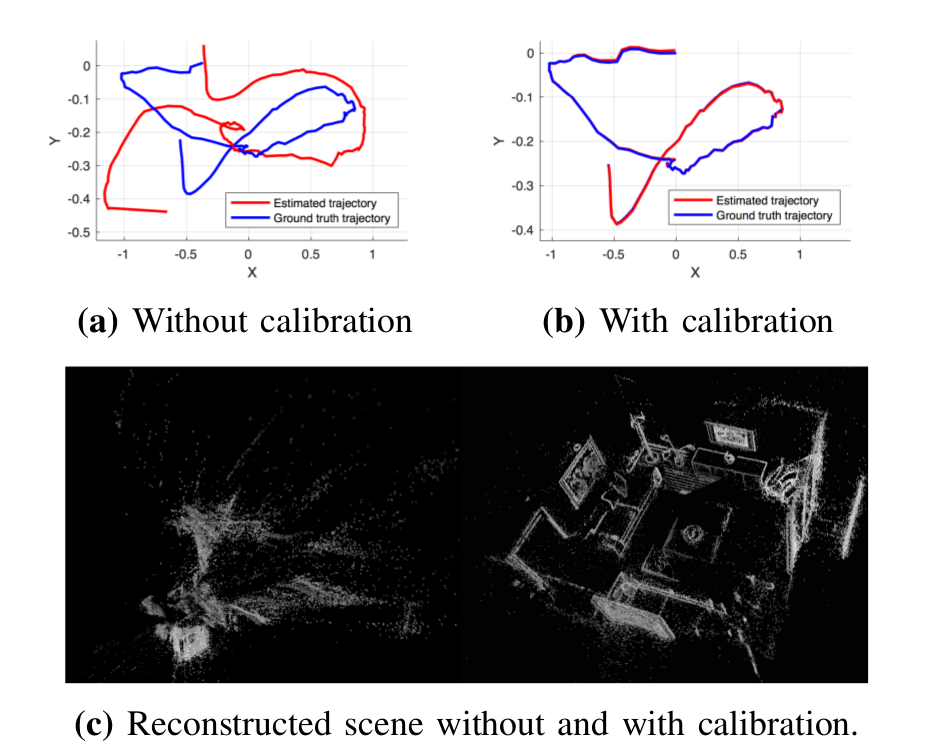
[] Simultaneous Calibration and Mapping , In International Symposium on Experimental Robotics (ISER), 2018.
[] 6DoF Pose Estimation for Industrial Manipulation based on Synthetic Data , In International Symposium on Experimental Robotics (ISER), 2018.
[] 
Robust Fitting of Subdivision Surfaces for Smooth Shape Analysis , In Proc. of the Int. Conference on 3D Vision (3DV), 2018. ([Code])
Received the Best Paper Award at 3DV 2018 [] 
Incremental Semi-Supervised Learning from Streams for Object Classification , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([code])
[] Appearance-Based Along-Route Localization for Planetary Missions , In International Conference on Intelligent Robots and Systems (IROS), 2018.
[] Persistent Anytime Learning of Objects from Unseen Classes , In International Conference on Intelligent Robots and Systems (IROS), 2018.
Best Cognitive Robotics Paper Finalist [] Implicit 3D Orientation Learning for 6D Object Detection from RGB Images , In European Conference on Computer Vision (ECCV), 2018.
Best Paper Award [] 
The Double Sphere Camera Model , In Proc. of the Int. Conference on 3D Vision (3DV), 2018. ([arxiv])
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry , In European Conference on Computer Vision (ECCV), 2018. ([arxiv],[supplementary],[project])
Oral Presentation [] 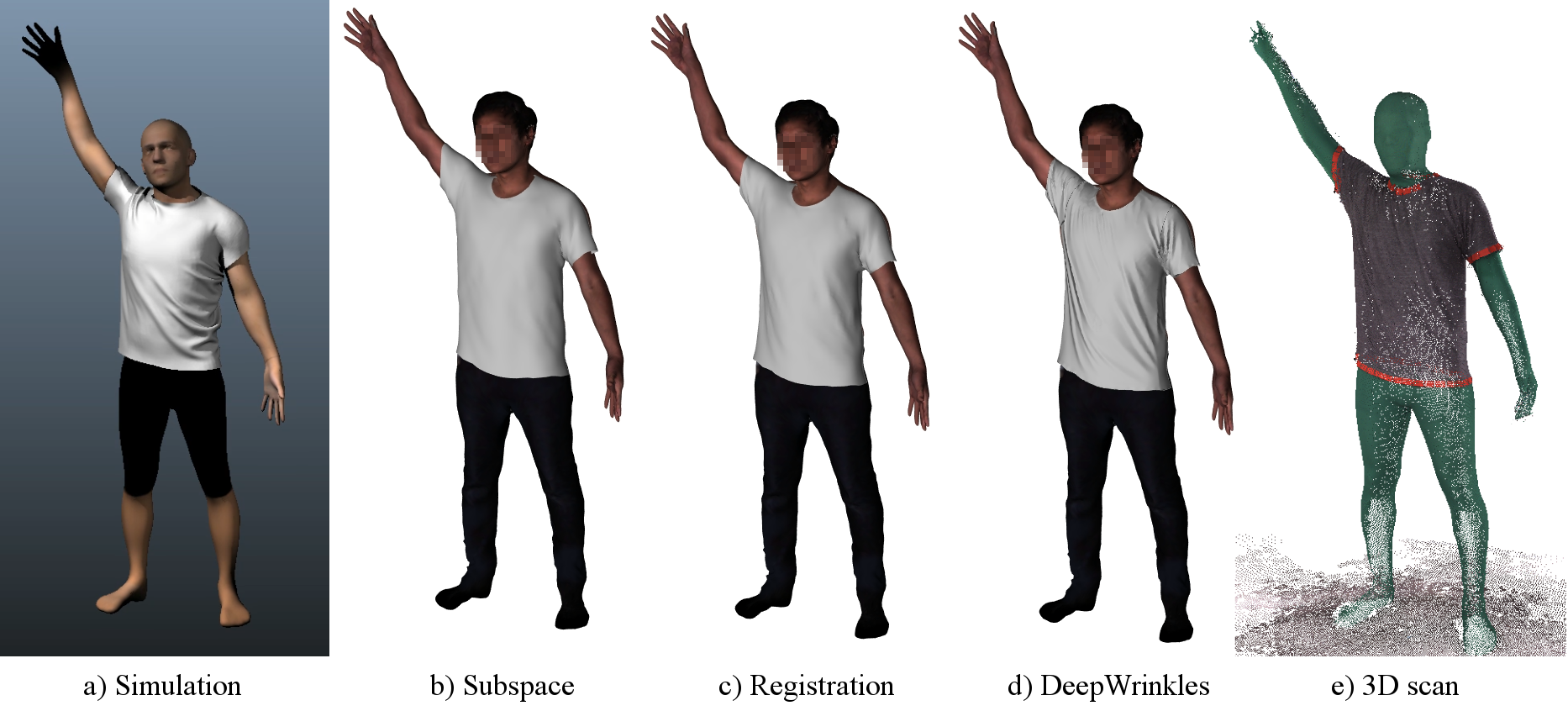
DeepWrinkles: Accurate and Realistic Clothing Modeling , In European Conference on Computer Vision (ECCV), 2018. ([Homepage], [Oral Presentation])
Oral Presentation [] 
LDSO: Direct Sparse Odometry with Loop Closure , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv][video][code][project])
[] 
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv])
[] 
Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization , In International Conference on Robotics and Automation (ICRA), 2018. ([supplementary][video][arxiv])
[] Semantic Labeling of Indoor Environments from 3D RGB Maps , In International Conference on Robotics and Automation (ICRA), 2018.
[] 
Proximal Backpropagation , In International Conference on Learning Representations (ICLR), 2018. (arXiv:1706.04638, code)
[] 
Associative Deep Clustering - Training a Classification Network with no Labels , In Proc. of the German Conference on Pattern Recognition (GCPR), 2018.
[] 
q-Space Deep Learning for Alzheimer's Disease Diagnosis: Global Prediction and Weakly-Supervised Localization , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2018.
[] 
q-Space Novelty Detection in Short Diffusion MRI Scans of Multiple Sclerosis , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2018.
[] StaticFusion: Background Reconstruction for Dense RGB-D SLAM in Dynamic Environments , In 2018 IEEE International Conference on Robotics and Automation, ICRA 2018, Brisbane, Australia, May 21-25, 2018, IEEE, 2018.
[] 
Combinatorial Preconditioners for Proximal Algorithms on Graphs , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2018.
[] 
A Nonconvex Proximal Splitting Algorithm under Moreau-Yosida Regularization , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2018.
[] MRF Optimization with Separable Convex Prior on Partially Ordered Labels , In Computer Vision - ECCV 2018 - 15th European Conference, Munich, Germany, September 8-14, 2018, Proceedings, Part VIII (V Ferrari, M Hebert, C Sminchisescu, Y Weiss, eds.), Springer, volume 11212, 2018.
[] ![]()
Discrete-Continuous ADMM for Transductive Inference in Higher-Order MRFs , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2018.
[] 
Fight ill-posedness with ill-posedness: Single-shot variational depth super-resolution from shading , In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2018. ([supp] [poster] [slides] [code] [cvf] [video])
Spotlight Presentation [] 
Deep Depth From Focus , In Asian Conference on Computer Vision (ACCV), 2018. ([arxiv], Deep Depth From Focus,[dataset])
[] 
Joint Representation of Primitive and Non-primitive Objects for 3D Vision , In 2018 International Conference on 3D Vision, 3DV 2018, Verona, Italy, September 5-8, 2018, IEEE Computer Society, 2018.
[] Fusion of Head and Full-Body Detectors for Multi-Object Tracking , In 2018 IEEE Conference on Computer Vision and Pattern Recognition Workshops, CVPR Workshops 2018, Salt Lake City, UT, USA, June 18-22, 2018, IEEE Computer Society, 2018.
2017
[] SAMP: Shape and Motion Priors for 4D Vehicle Reconstruction , In IEEE Winter Conference on Applications of Computer Vision, WACV, 2017.
[] Keyframe-Based Visual-Inertial Online SLAM with Relocalization , In IEEE/RSJ Int. Conference on Intelligent Robots and Systems, IROS, 2017.
[] Semi-Supervised Deep Learning for Monocular Depth Map Prediction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[] 
A Combinatorial Solution to Non-Rigid 3D Shape-to-Image Matching , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[] 
A Variational Approach to Shape-from-shading Under Natural Illumination , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), 2017. ([codes])
[] Experience-based Optimization of Robotic Perception , In International Conference on Advanced Robotics (ICAR), 2017.
[] How Robots Learn to Classify New Objects Trained from Small Data Sets , In Conference on Robot Learning (CoRL), 2017.
[] A Method for Hand-Eye and Camera-to-Camera Calibration for Limited Fields of View , In International Conference on Intelligent Robots and Systems (IROS), 2017.
[] Selecting CNN Features for Online Learning of 3D Objects , In International Conference on Intelligent Robots and Systems (IROS), 2017.
[] 
Sublabel-Accurate Discretization of Nonconvex Free-Discontinuity Problems , In International Conference on Computer Vision (ICCV), 2017. ([supp])
[] 
Stereo DSO: Large-Scale Direct Sparse Visual Odometry with Stereo Cameras , In International Conference on Computer Vision (ICCV), 2017. ([supplementary][video][arxiv][project])
[] 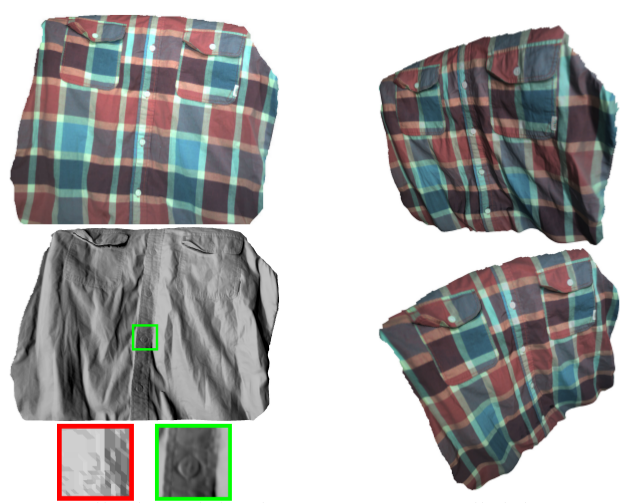
Depth Super-Resolution Meets Uncalibrated Photometric Stereo , In IEEE International Conference on Computer Vision Workshops (ICCVW), 2017. ([code][slides] [cvf])
Oral Presentation at ICCV Workshop on Color and Photometry in Computer Vision [] 
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting , In International Conference on Computer Vision (ICCV), 2017. ([slides] [poster] [dataset] [code])
[] 
Multiframe Scene Flow with Piecewise Rigid Motion , In International Conference on 3D Vision (3DV), 2017. ([slides] [poster] [supplementary])
Spotlight Presentation [] Multiframe Motion Coupling for Video Super Resolution , In Energy Minimization Methods in Computer Vision and Pattern Recognition - 11th International Conference, EMMCVPR 2017, Venice, Italy, October 30 - November 1, 2017, Revised Selected Papers (M Pelillo, ER. Hancock, eds.), Springer, volume 10746, 2017.
[] 
Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction , In British Machine Vision Conference (BMVC), 2017. ([poster] [supplementary])
[] 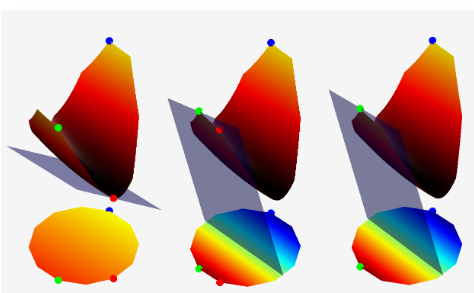
Efficient Deformable Shape Correspondence via Kernel Matching , In International Conference on 3D Vision (3DV), 2017. ([arxiv],[Code])
Oral Presentation [] 
Stéréophotométrie microscopique sans démosaïquage , In GRETSI, 2017.
[] 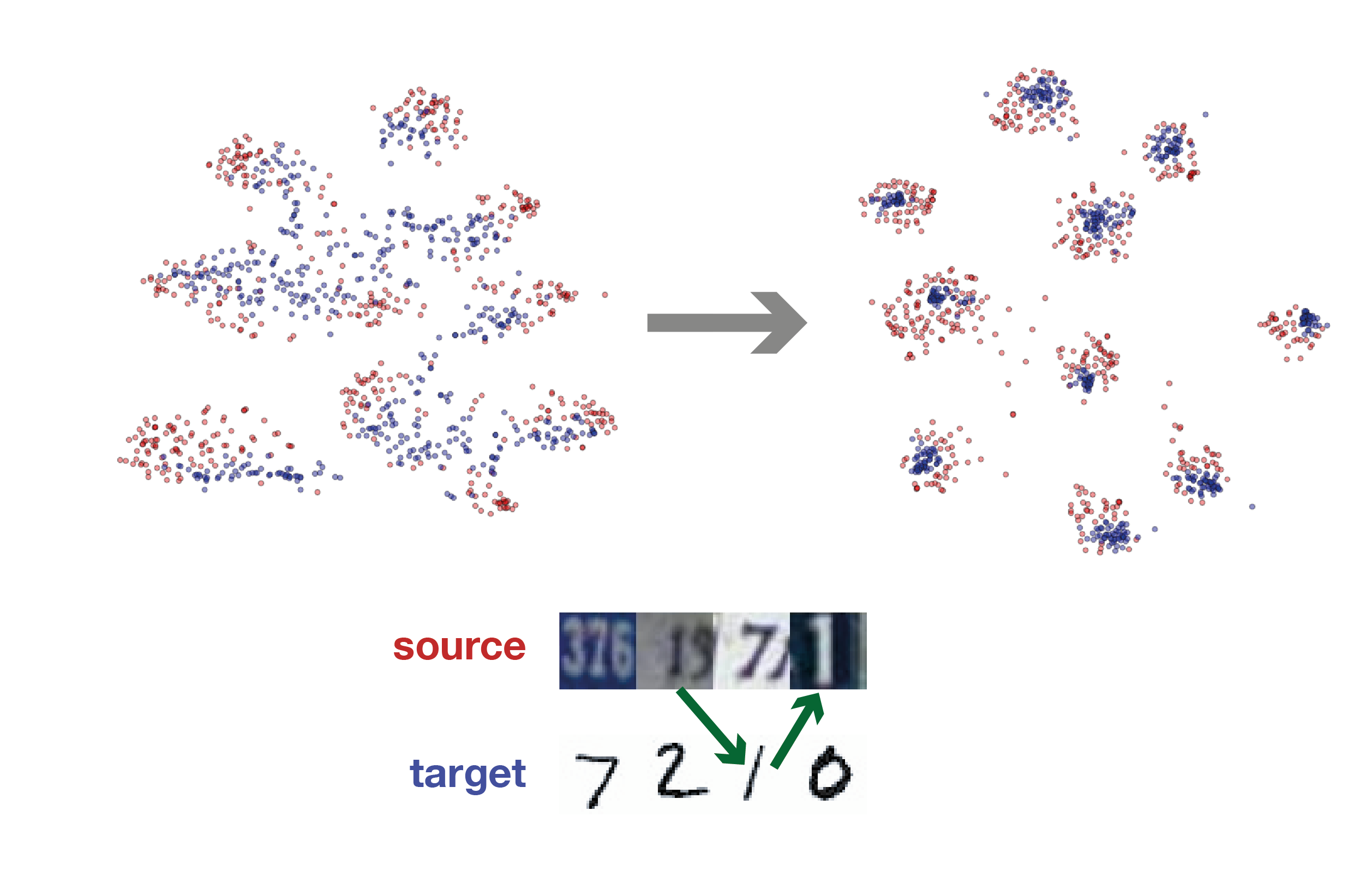
Associative Domain Adaptation , In IEEE International Conference on Computer Vision (ICCV), 2017. ([code] [PDF from CVF])
[] 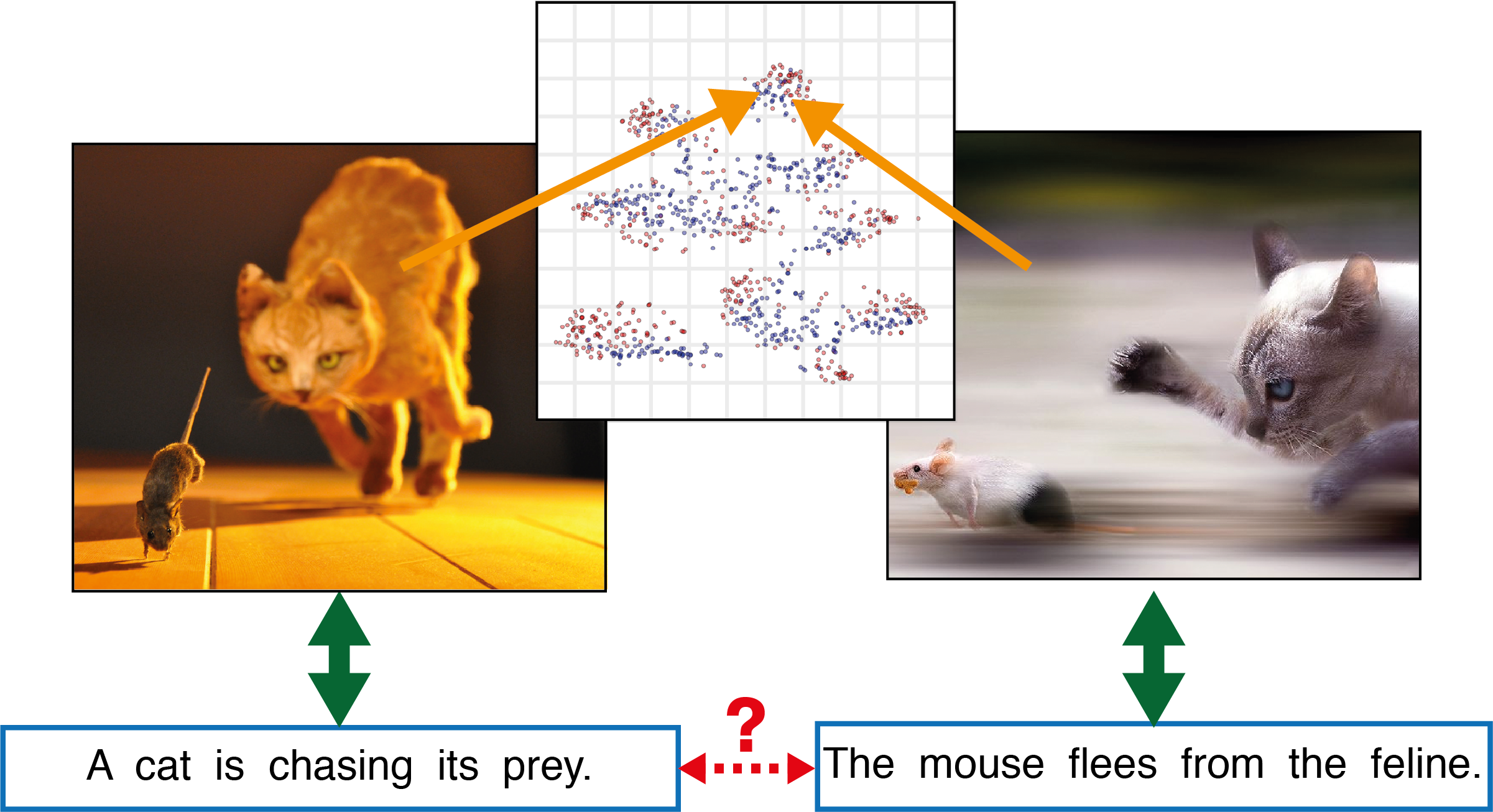
Better Text Understanding Through Image-To-Text Transfer , In arxiv:1705.08386, 2017.
[] 
Dense Multi-view 3D-reconstruction Without Dense Correspondences , In ArXiv preprint 1704.00337, 2017. ([arxiv])
[] 
One-Shot Video Object Segmentation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[] 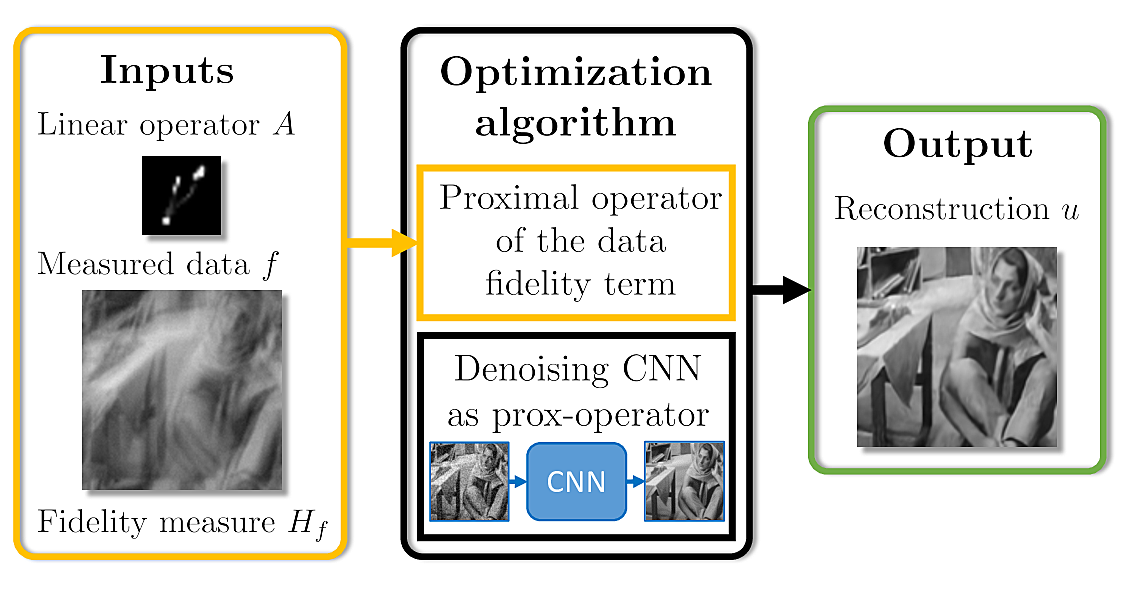
Learning Proximal Operators: Using Denoising Networks for Regularizing Inverse Imaging Problems , In IEEE International Conference on Computer Vision (ICCV), 2017. ([arxiv], [code])
[] 
A Non-Convex Variational Approach to Photometric Stereo under Inaccurate Lighting , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. ([codes])
[] 
Simultaneous Reconstruction and Segmentation of CT Scans with Shadowed Data , In International Conference on Scale Space and Variational Methods in Computer Vision (SSVM), 2017.
[] 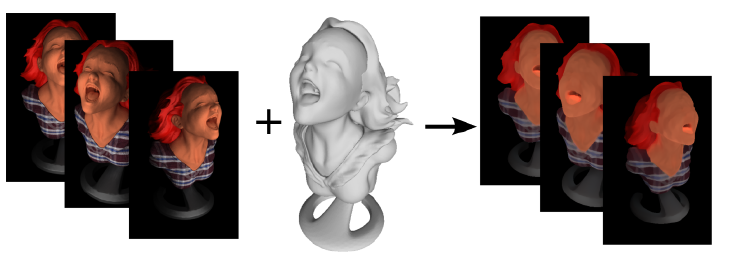
Beyond Multi-view Stereo: Shading-Reflectance Decomposition , In International Conference on Scale Space and Variational Methods in Computer Vision (SSVM), 2017.
[] 
Semi-Calibrated Near-Light Photometric Stereo , In International Conference on Scale Space and Variational Methods in Computer Vision (SSVM), 2017. ([codes])
[] 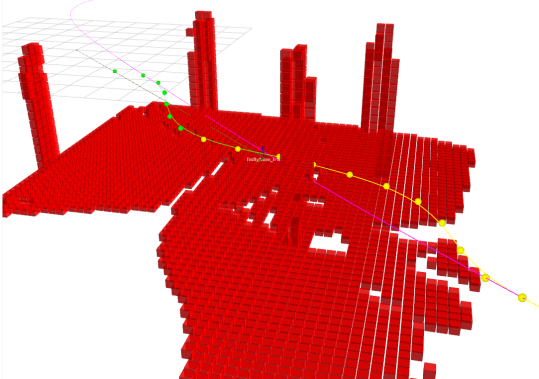
Real-Time Trajectory Replanning for MAVs using Uniform B-splines and a 3D Circular Buffer , In International Conference on Intelligent Robots and Systems (IROS), 2017. ([arxiv])
Best Paper Award - Finalist (link) [] 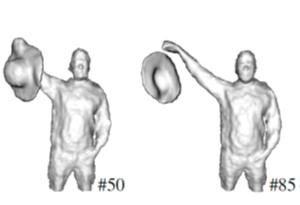
KillingFusion: Non-rigid 3D Reconstruction without Correspondences , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[] 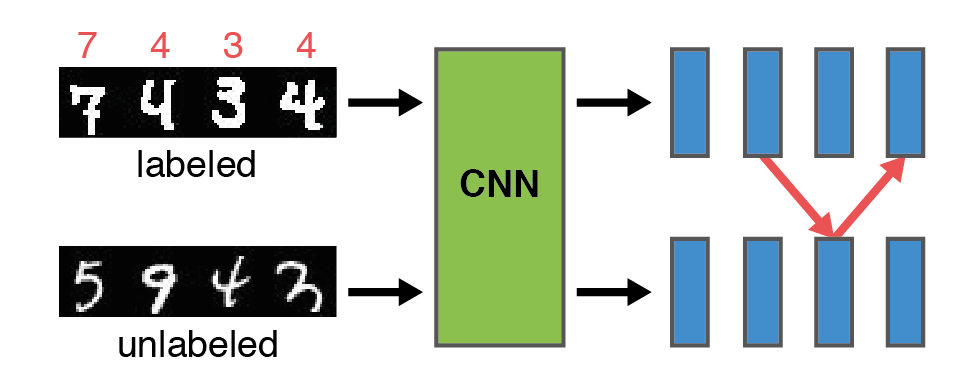
Learning by Association - A versatile semi-supervised training method for neural networks , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. ([code] [PDF from CVF])
[] 
Microgeometry capture and RGB albedo estimation by photometric stereo without demosaicing , In International Conference on Quality Control by Artificial Vision (QCAV), 2017. ([codes])
[] Establishment of an interdisciplinary workflow of machine learning-based Radiomics in sarcoma patients , In 23. Jahrestagung der Deutschen Gesellschaft für Radioonkologie (DEGRO), 2017.
[] 
Image-based localization using LSTMs for structured feature correlation , In IEEE International Conference on Computer Vision (ICCV), 2017. ([arxiv])
[] 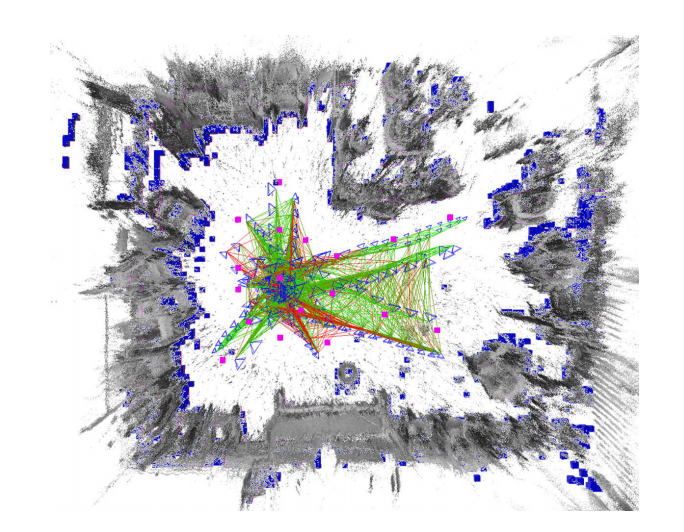
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])
[] 
De-noising, Stabilizing and Completing 3D Reconstructions On-the-go using Plane Priors , In International Conference on Robotics and Automation (ICRA), 2017. ([video])
[] 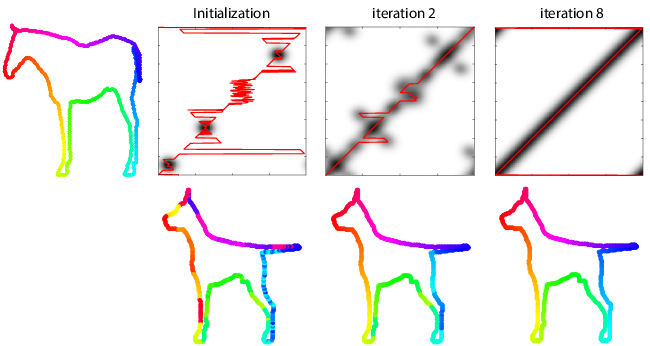
Product Manifold Filter: Non-Rigid Shape Correspondence via Kernel Density Estimation in the Product Space , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. ([Code], also check the related github repository)
[] 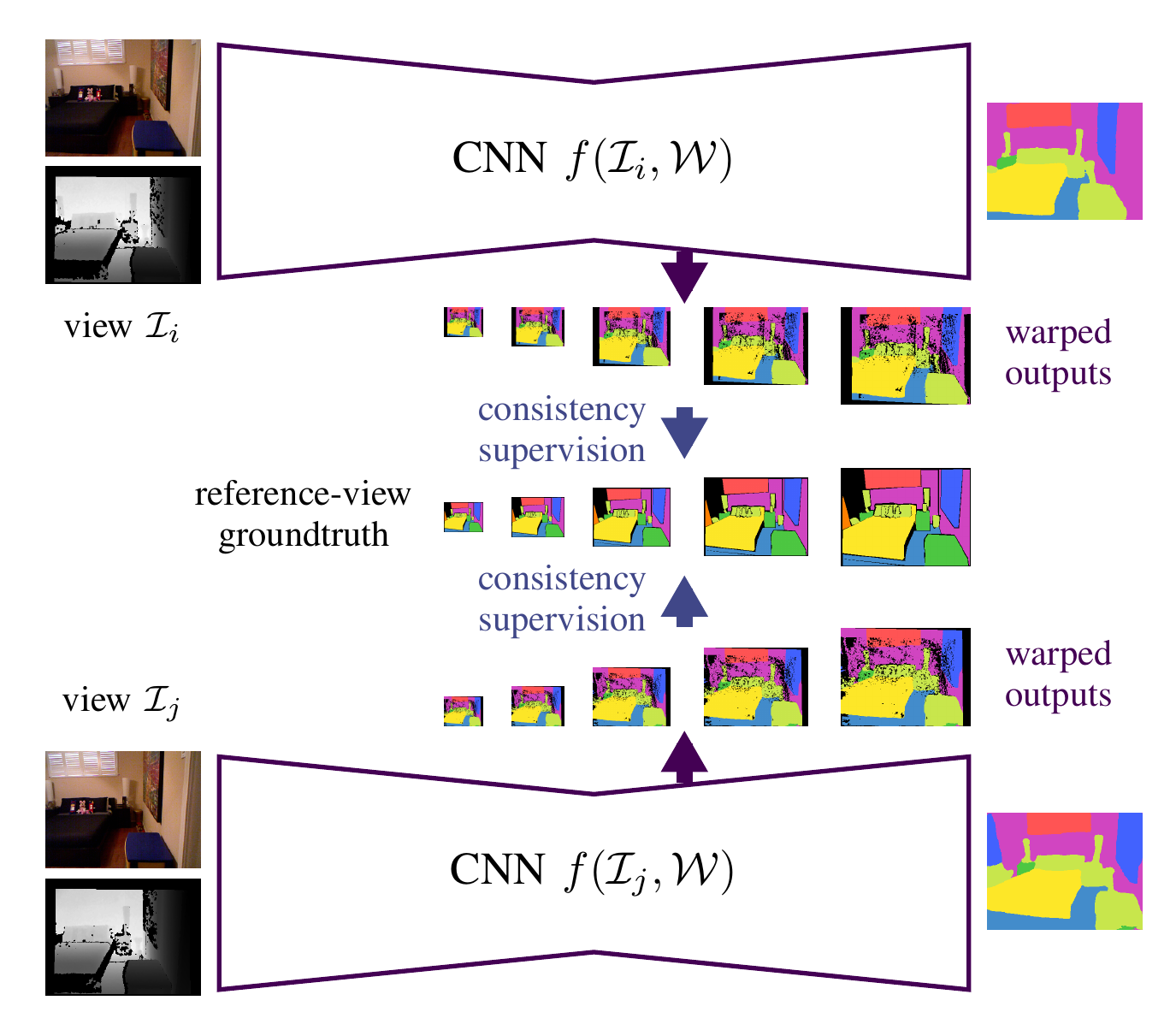
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2017.
[] 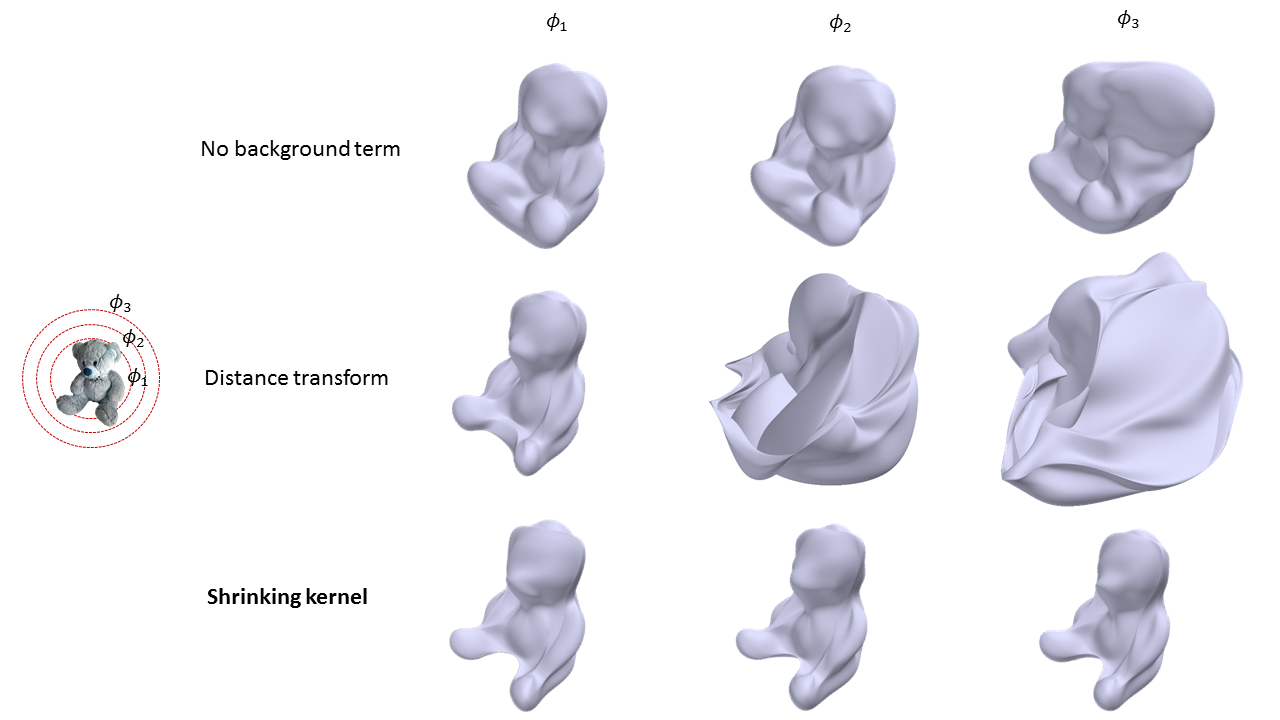
An Efficient Background Term for 3D Reconstruction and Tracking with Smooth Subdivision Surface Models , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. ([video])
[] 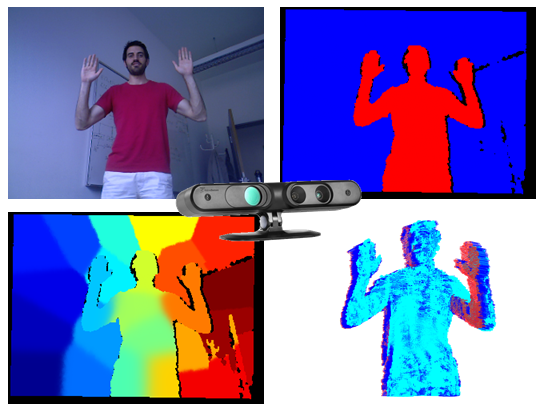
Fast Odometry and Scene Flow from RGB-D Cameras based on Geometric Clustering , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2017. ([video])
[] Real-time variational stereo reconstruction with applications to large-scale dense SLAM , In IEEE Intelligent Vehicles Symposium, IV 2017, Los Angeles, CA, USA, June 11-14, 2017, IEEE, 2017.
[] Map-based drone homing using shortcuts , In 2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, MFI 2017, Daegu, Korea (South), November 16-18, 2017, IEEE, 2017.
[] Nonlinear Spectral Image Fusion , In Scale Space and Variational Methods in Computer Vision - 6th International Conference, SSVM 2017, Kolding, Denmark, June 4-8, 2017, Proceedings (F. Lauze, Y. Dong, A. Dahl, eds.), Springer, volume 10302, 2017.
2016
[] Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using 3D Shape Priors , In Proc. of the German Conference on Pattern Recognition (GCPR), 2016.
[] Scene Flow Propagation for Semantic Mapping and Object Discovery in Dynamic Street Scenes , In IEEE/RSJ Int. Conference on Intelligent Robots and Systems, IROS, 2016.
[] Unsupervised Learning of Shape-Motion Patterns for Objects in Urban Street Scenes , In British Machine Vision Conference (BMVC), 2016.
[] Scaling the world of monocular SLAM with INS-measurements for UAS navigation , In 19th International Conference on Information Fusion, FUSION 2016, Heidelberg, Germany, July 5-8, 2016, IEEE, 2016.
[] 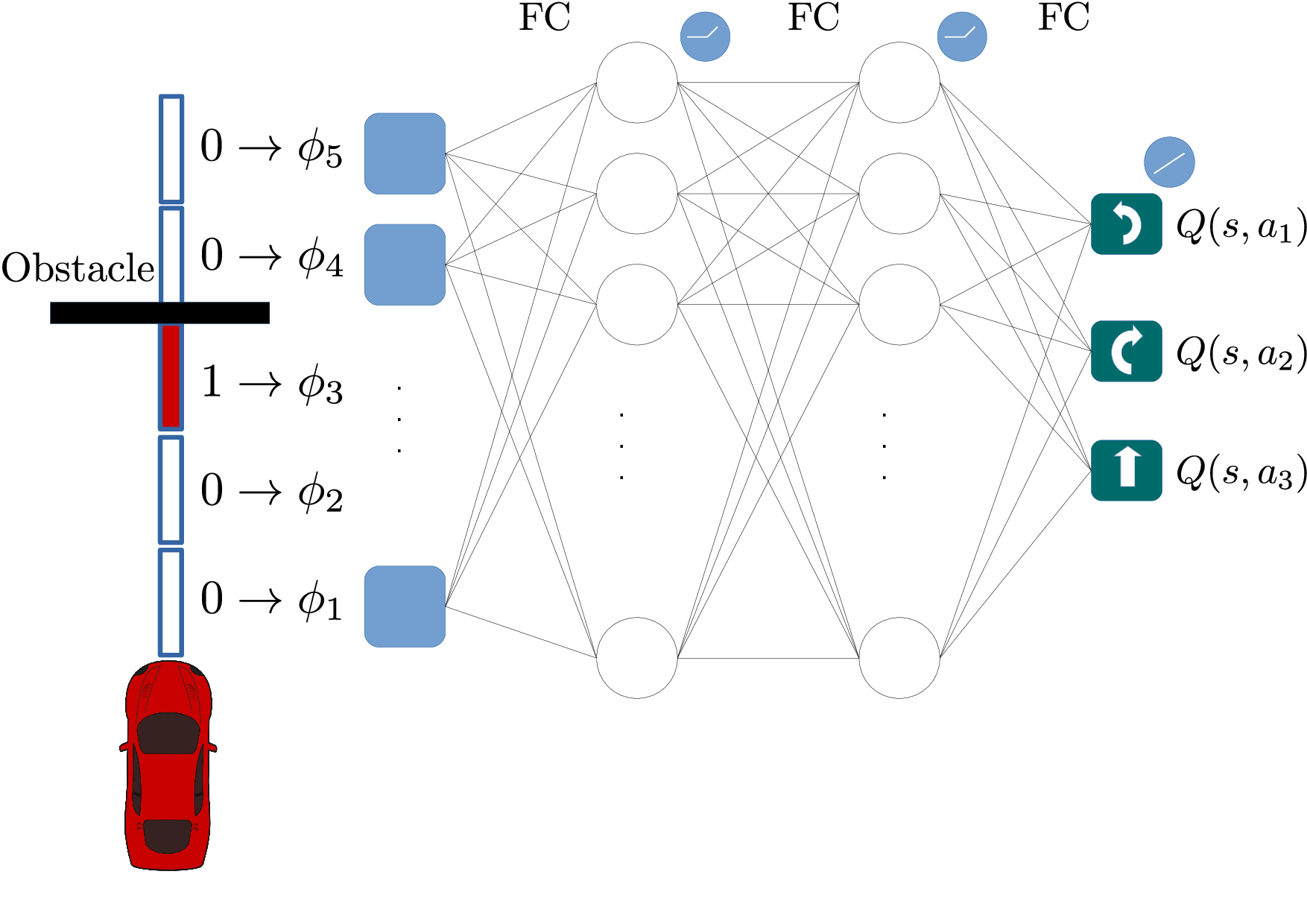
Learning to Drive using Inverse Reinforcement Learning and Deep Q-Networks , In , NIPS Workshops, 2016. ([arxiv])
[] 
A Convex Solution to Spatially-Regularized Correspondence Problems , In European Conference on Computer Vision (ECCV), 2016.
[] 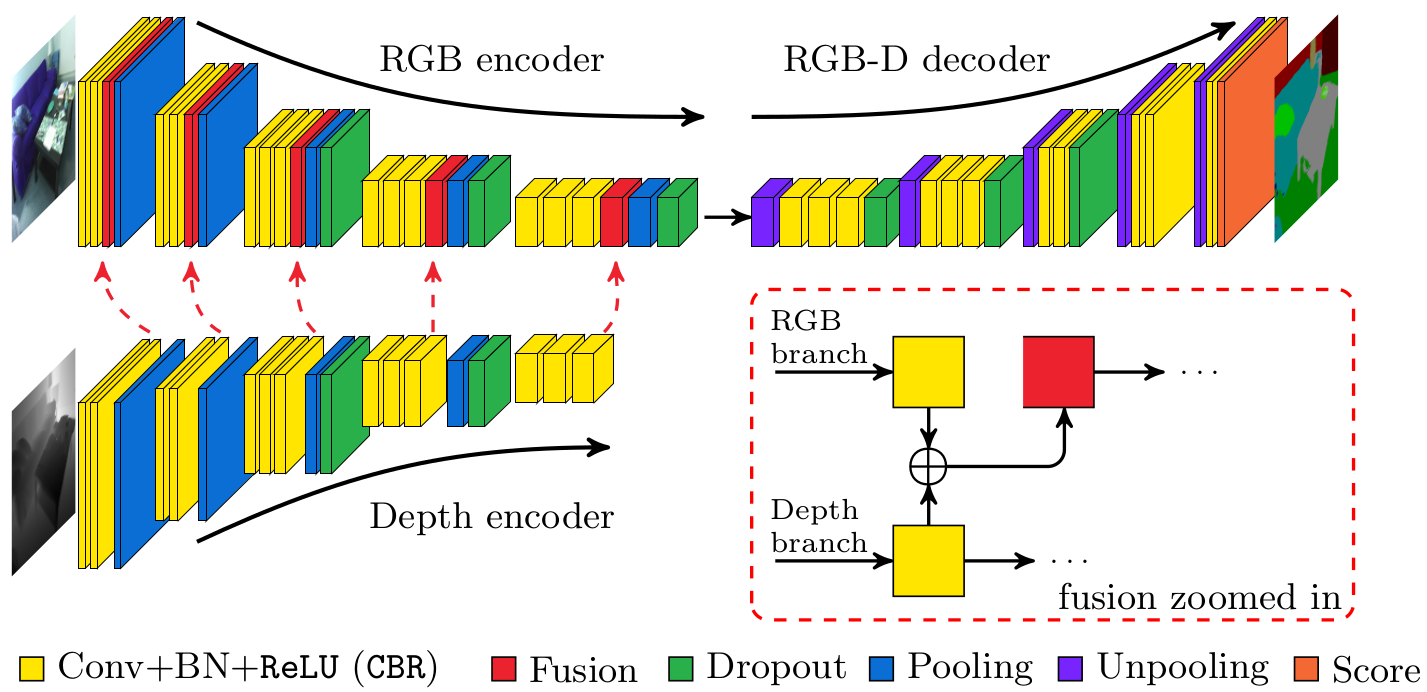
FuseNet: Incorporating Depth into Semantic Segmentation via Fusion-based CNN Architecture , In Asian Conference on Computer Vision, 2016. ([code])
[] 
Non-Rigid 3D Shape Retrieval via Large Margin Nearest Neighbor Embedding , In European Conference on Computer Vision (ECCV), 2016. ([code])
[] A position free boresight calibration for INS-camera systems , In 2016 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, MFI 2016, Baden-Baden, Germany, September 19-21, 2016, IEEE, 2016.
[] 
Sublabel-Accurate Convex Relaxation of Vectorial Multilabel Energies , In European Conference on Computer Vision (ECCV), 2016. ([supp] [code])
[] 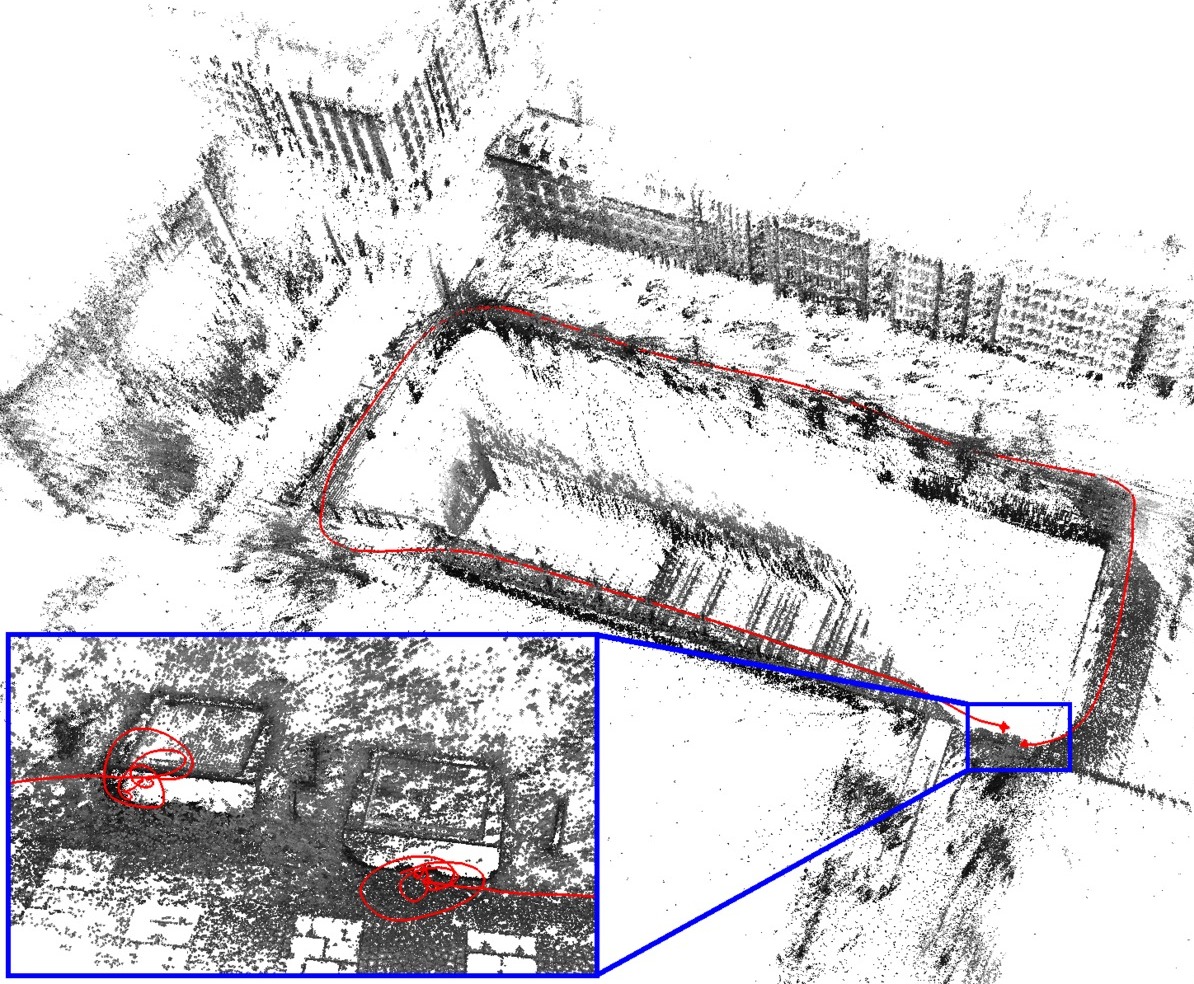
Direct Sparse Odometry , In arXiv:1607.02565, 2016.
[] 
A Photometrically Calibrated Benchmark For Monocular Visual Odometry , In arXiv:1607.02555, 2016.
[] 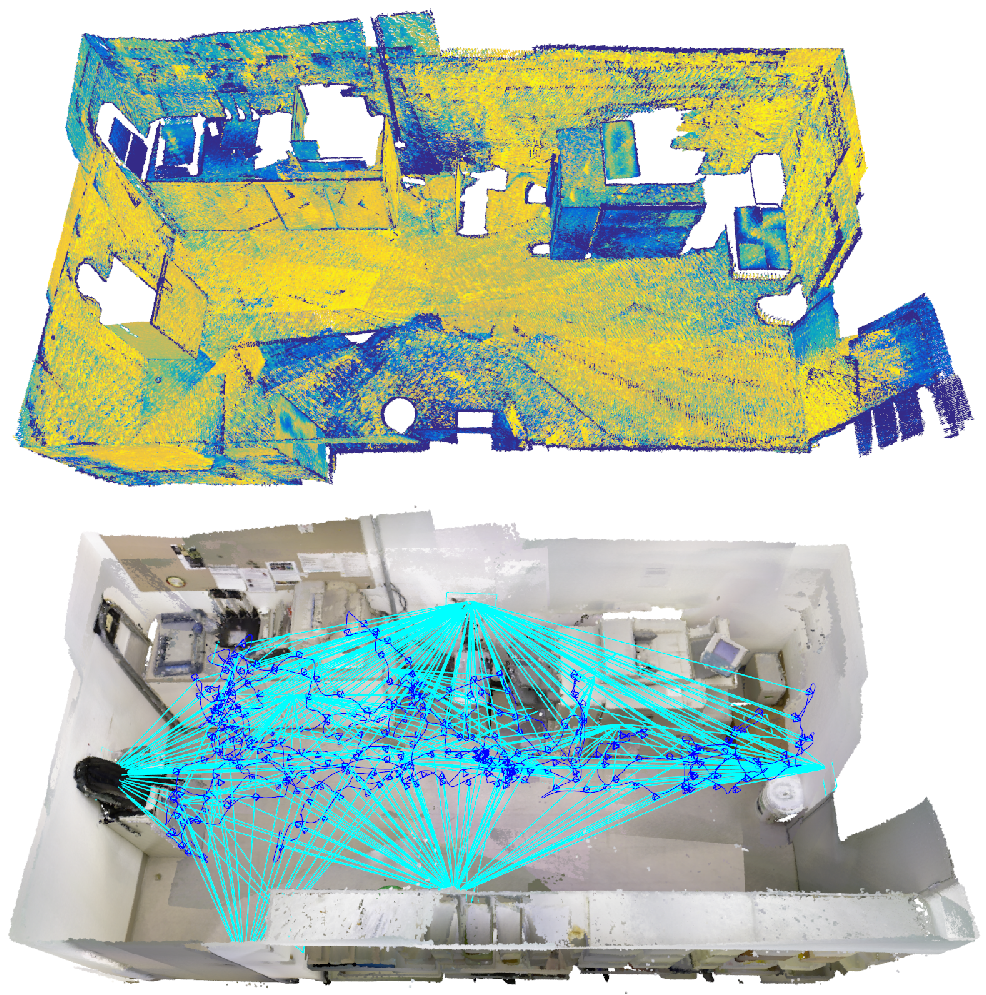
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM , In International Conference on Robotics and Automation (ICRA), 2016.
[] 
Sublabel-Accurate Relaxation of Nonconvex Energies , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016. ([supp] [code])
Oral Presentation, Received the Best Paper Honorable Mention Award at CVPR 2016 [] 
SHREC’16: Partial Matching of Deformable Shapes , In Proc. of Eurographics Workshop on 3D Object Retrieval (3DOR), 2016. (to appear)
[] 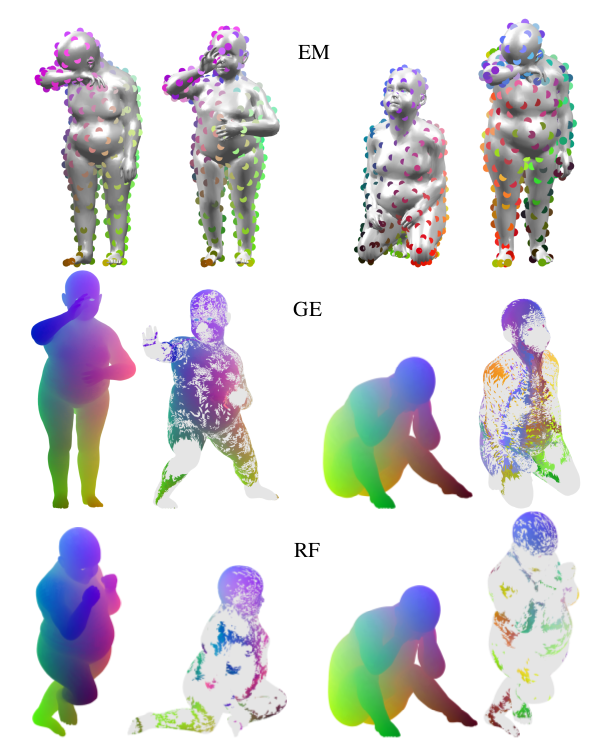
SHREC’16: Matching of Deformable Shapes with Topological Noise , In Proc. of Eurographics Workshop on 3D Object Retrieval (3DOR), 2016. ([Dataset])
[] 
Stream-based Active Learning for Efficient and Adaptive Classification of 3D Objects , In International Conference on Robotics and Automation (ICRA), 2016.
[] 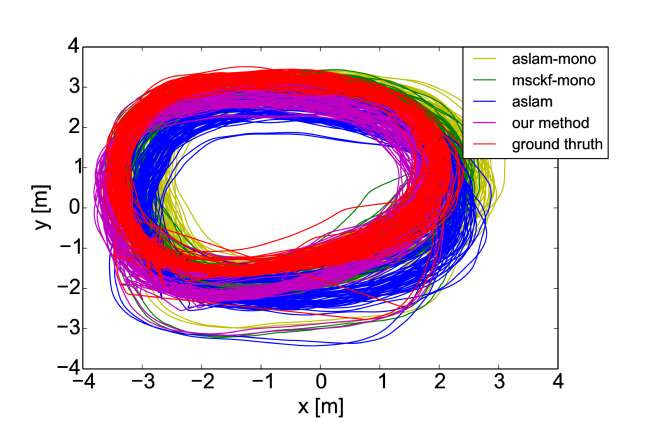
Direct Visual-Inertial Odometry with Stereo Cameras , In International Conference on Robotics and Automation (ICRA), 2016.
[] 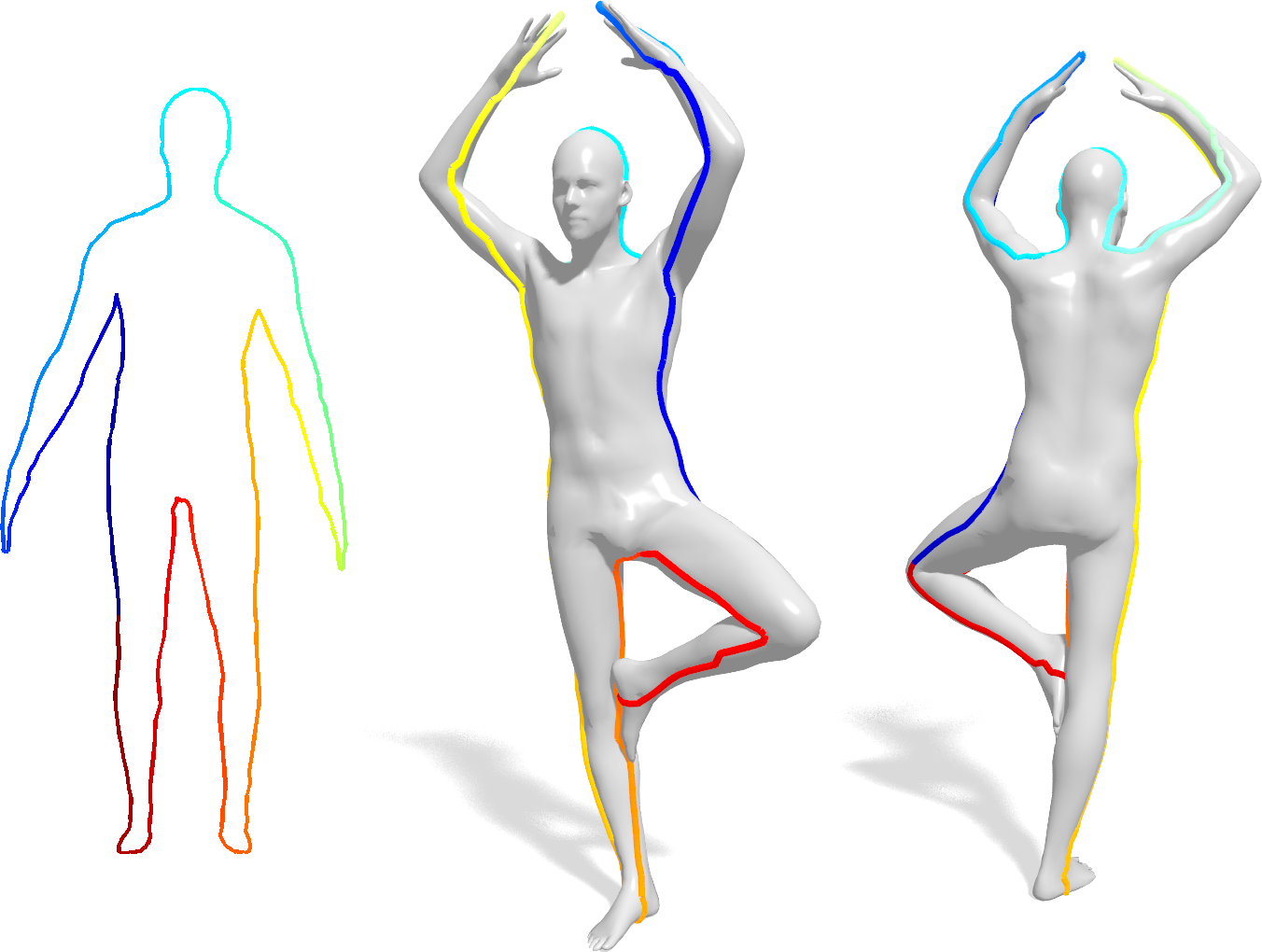
Efficient Globally Optimal 2D-to-3D Deformable Shape Matching , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016. ([Code], [Homepage])
[] 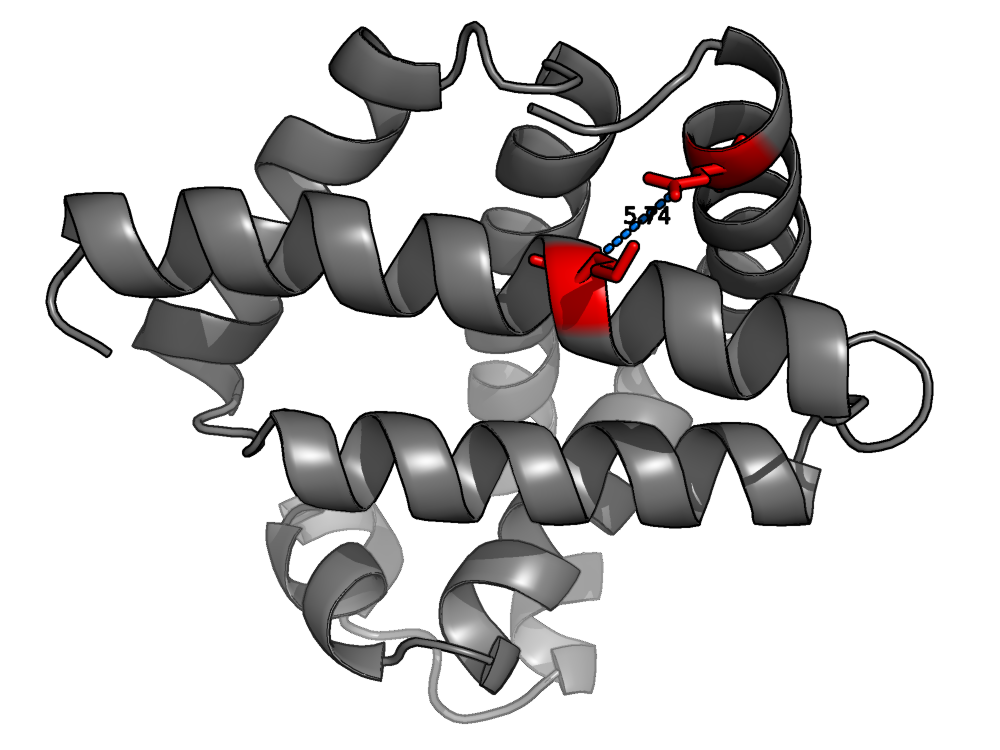
Protein Contact Prediction from Amino Acid Co-Evolution Using Convolutional Networks for Graph-Valued Images , In Annual Conference on Neural Information Processing Systems (NIPS), 2016. ([video])
Oral Presentation (acceptance rate: under 2%) [] 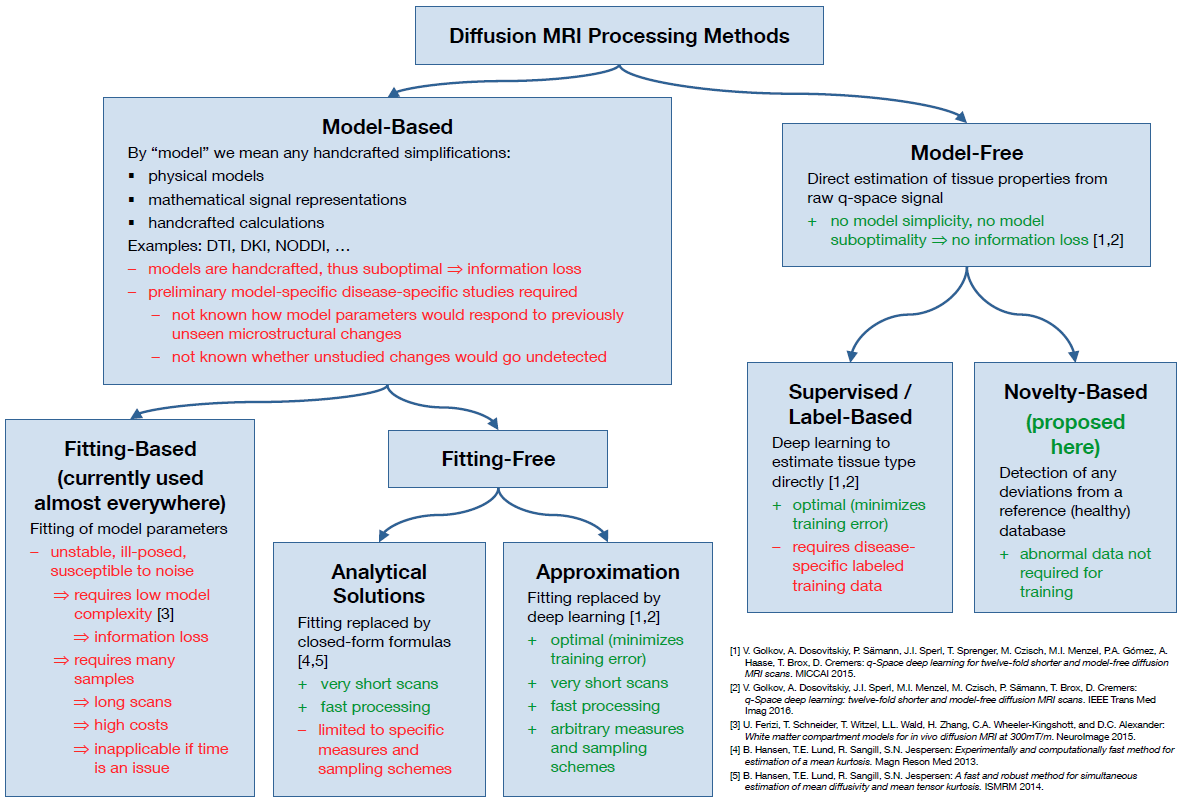
Model-Free Novelty-Based Diffusion MRI , In IEEE International Symposium on Biomedical Imaging (ISBI), 2016.
[] A Large Dataset to Train Convolutional Networks for Disparity, Optical Flow, and Scene Flow Estimation , In 2016 IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, June 27-30, 2016, IEEE Computer Society, 2016.
[] 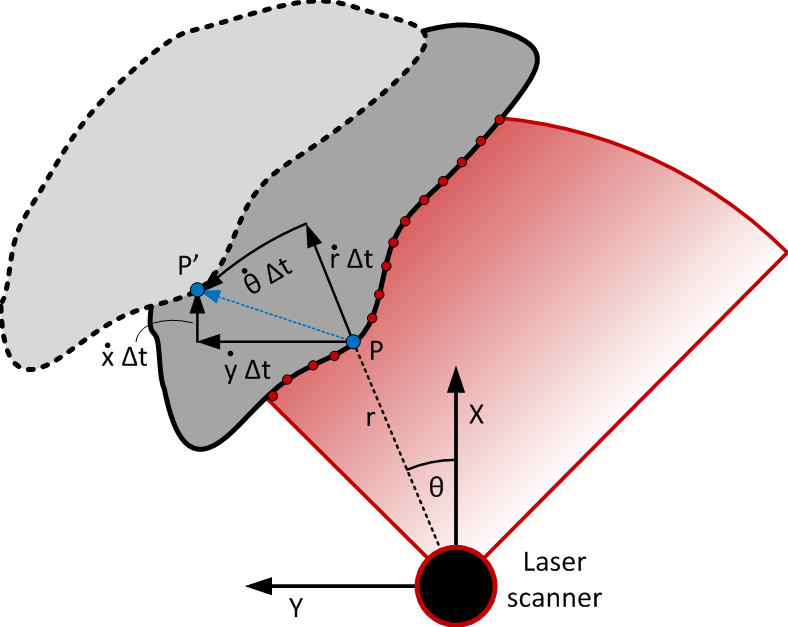
Planar Odometry from a Radial Laser Scanner. A Range Flow-based Approach , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2016. ([video])
[] A game-theoretical approach for joint matching of multiple feature throughout unordered images , In 23rd International Conference on Pattern Recognition, ICPR 2016, Cancún, Mexico, December 4-8, 2016, IEEE, 2016.
2015
[] A Novel Framework for Nonlocal Vectorial Total Variation Based on $\ell^{p,q,r}$−norms , In Proceedings of the 10th International Conference on Energy Minimization Methods in Computer Vision and Pattern Recognition, Springer International Publishing, 2015.
[] 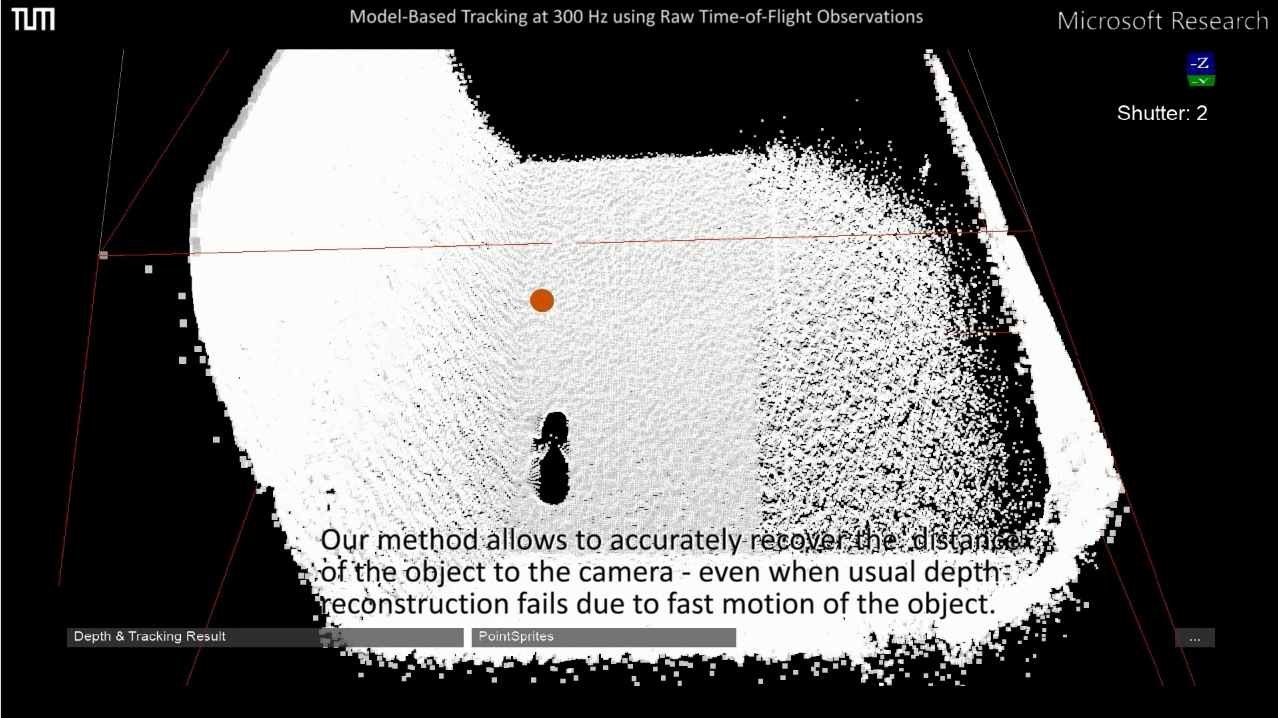
Model-Based Tracking at 300Hz using Raw Time-of-Flight Observations , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video])
[] 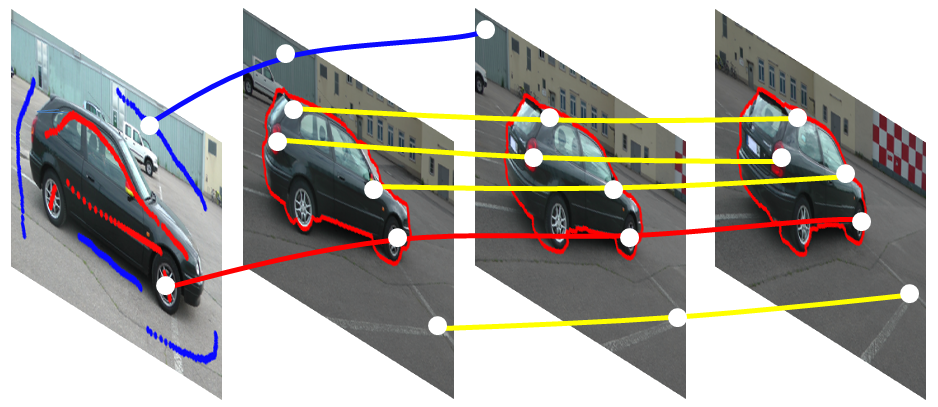
Video Segmentation with Just a Few Strokes , In IEEE International Conference on Computer Vision (ICCV), 2015.
[] 
CAPTCHA Recognition with Active Deep Learning , In GCPR Workshop on New Challenges in Neural Computation, 2015. ([code])
[] 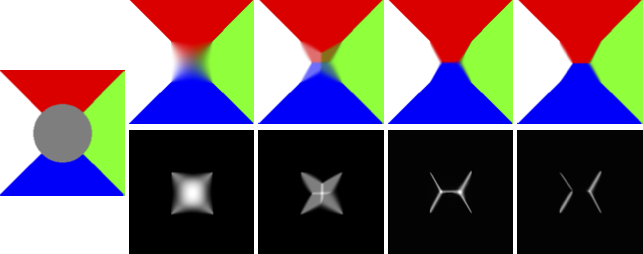
Entropy Minimization for Convex Relaxation Approaches , In IEEE International Conference on Computer Vision (ICCV), 2015. (accepted)
[] 
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video][supplementary][datasets])
[] 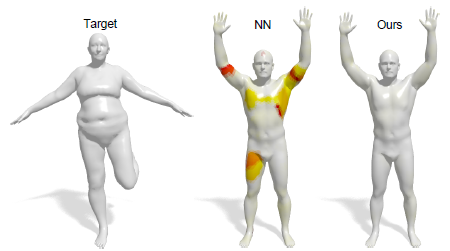
Point-wise Map Recovery and Refinement from Functional Correspondence , In Proceedings Vision, Modeling and Visualization (VMV), 2015.
Received the Best Paper Award [] 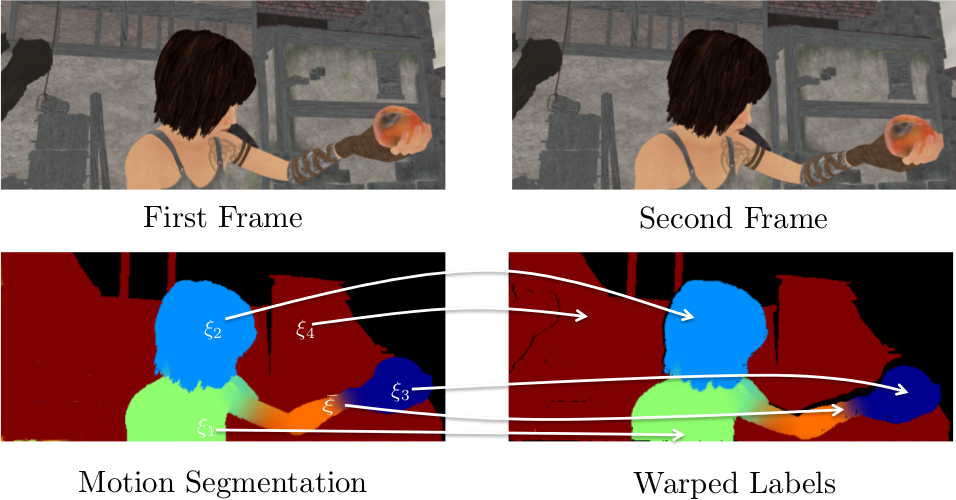
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images , In Proc. of the Int. Conference on 3D Vision (3DV), 2015. ([video])
[] 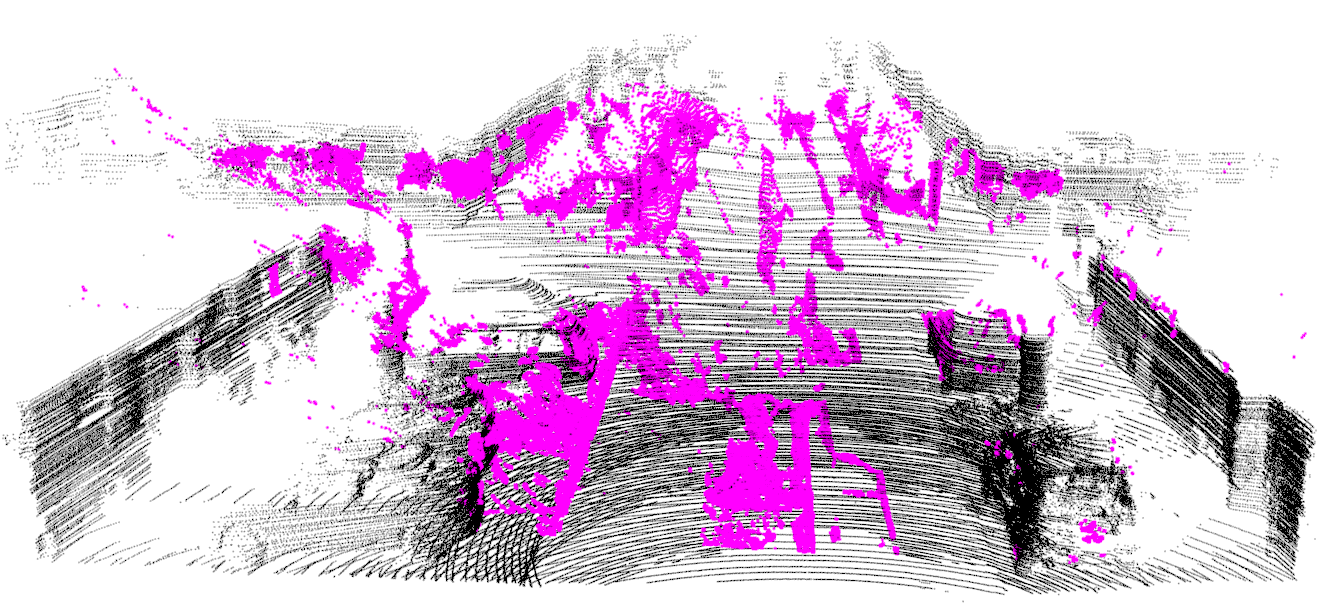
Reconstructing Street-Scenes in Real-Time From a Driving Car , In Proc. of the Int. Conference on 3D Vision (3DV), 2015.
[] 
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures , In International Conference on 3D Vision (3DV), 2015. ([slides] [poster])
[] 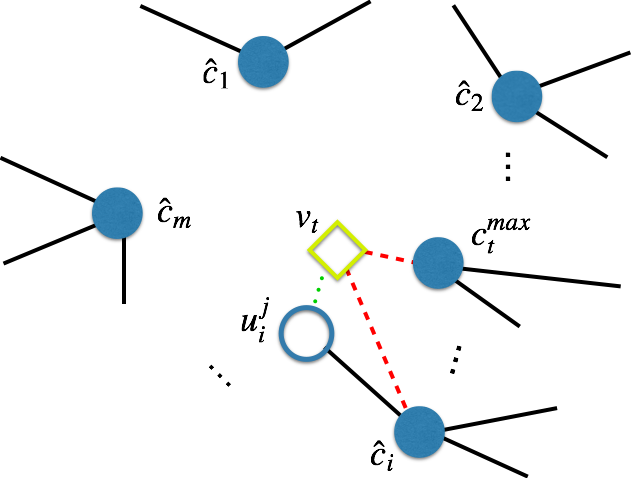
Semi-supervised Online Learning for Efficient Classification of Objects in 3D Data Streams , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] 
Large-Scale Direct SLAM for Omnidirectional Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] 
Large-Scale Direct SLAM with Stereo Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] 
SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports , In Proc. Field and Service Robotics (FSR), 2015.
[] 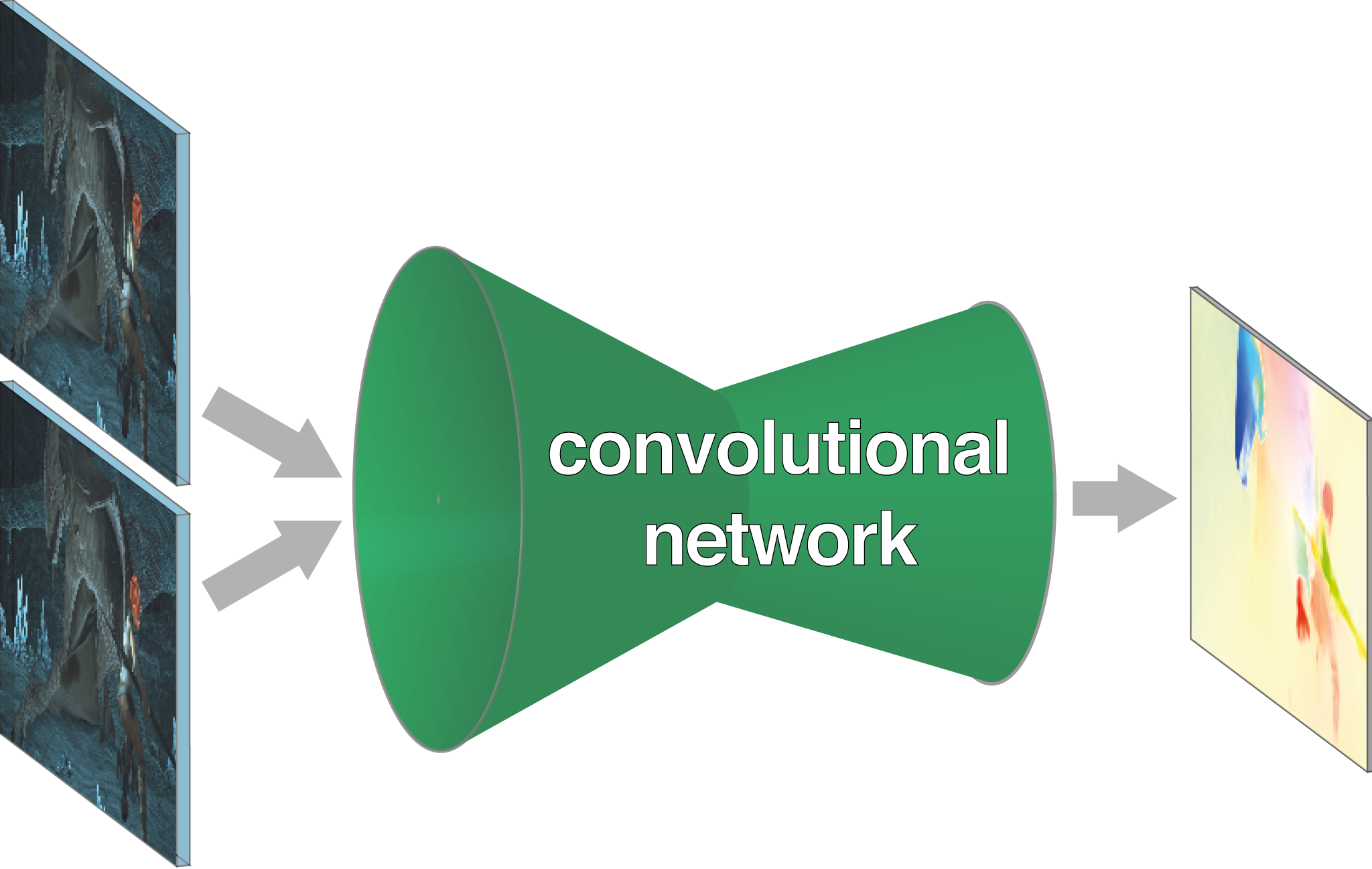
FlowNet: Learning Optical Flow with Convolutional Networks , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video],[code])
[] 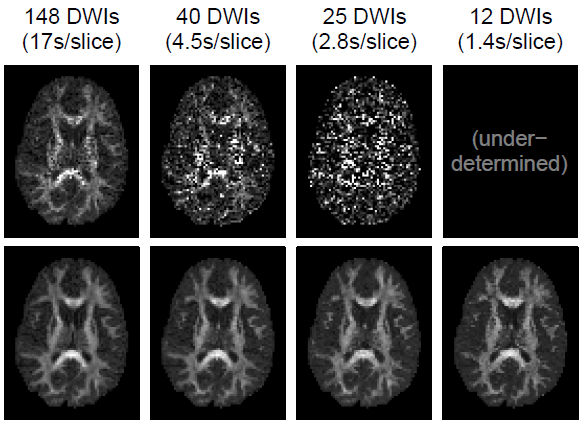
q-Space Deep Learning for Twelve-Fold Shorter and Model-Free Diffusion MRI Scans , In Medical Image Computing and Computer Assisted Intervention (MICCAI), 2015.
[] Free-Breathing, Self-Navigated RUFIS Lung Imaging with Motion Compensated Image Reconstruction , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2015.
[] Robustness of Phase Sensitive Reconstruction in Diffusion Spectrum Imaging , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2015.
[] Using Diffusion and Structural MRI for the Automated Segmentation of Multiple Sclerosis Lesions , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2015.
[] 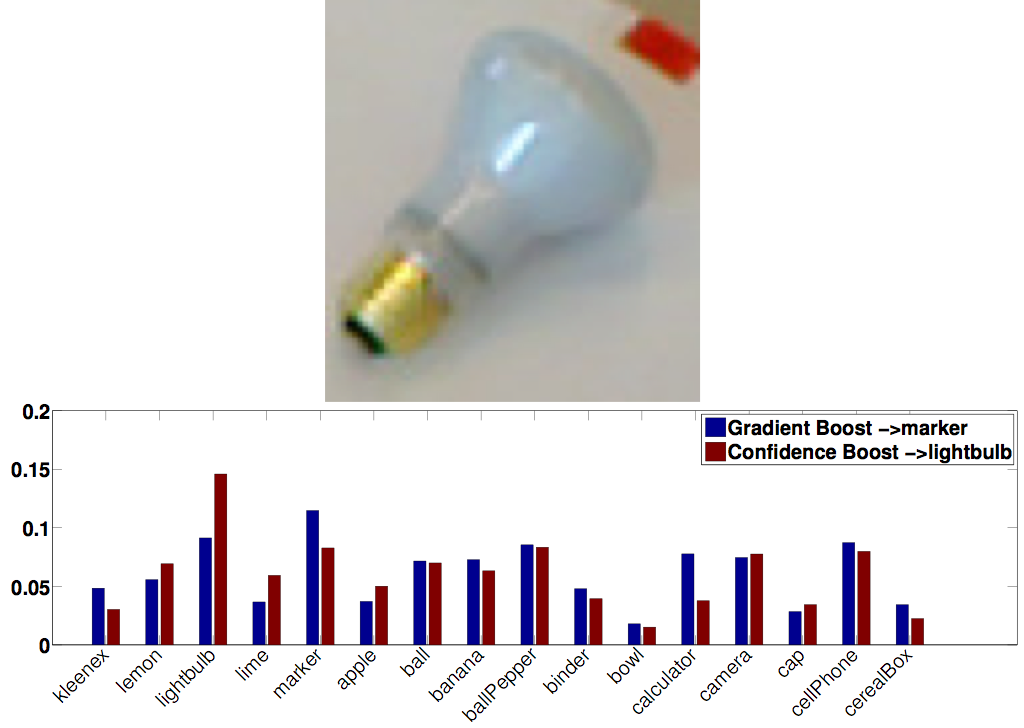
Active Online Confidence Boosting for Efficient Object Classification , In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
[] 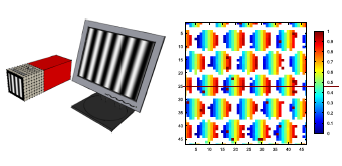
Adopting an Unconstrained Ray Model in Light-field Cameras for 3D Shape Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2015.
[] 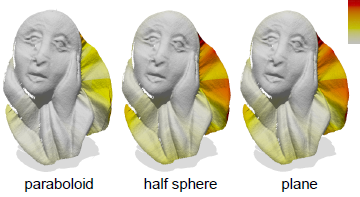
Analysis of Surface Parametrizations for Modern Photometric Stereo Modeling , In International Conference on Quality Control by Artificial Vision (QCAV), 2015.
[] 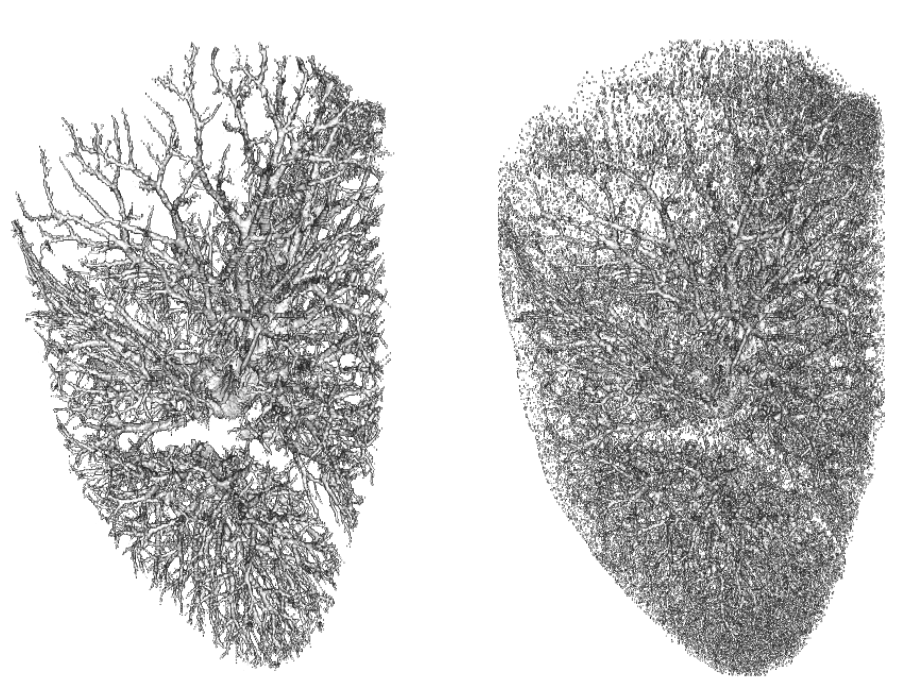
A Fast Projection Method for Connectivity Constraints in Image Segmentation , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR) (X.-C. Tai, E. Bae, T. F. Chan, M. Lysaker, eds.), 2015.
[] 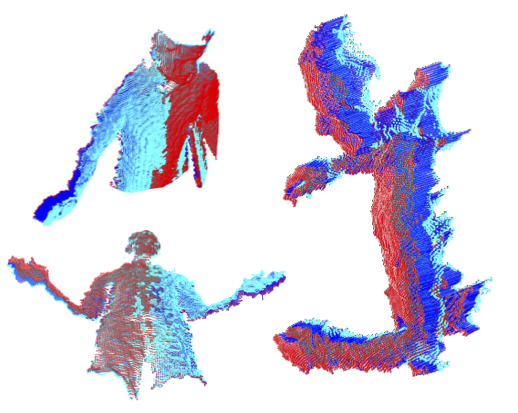
A Primal-Dual Framework for Real-Time Dense RGB-D Scene Flow , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2015. ([video])
[] 
Low Rank Priors for Color Image Regularization , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), 2015.
[] 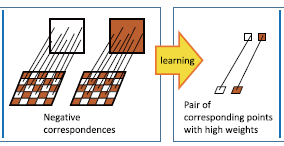
グラフマッチング学習を用いたRGB-D画像からの物体検出 [Graph matching gakushuu wo mochiita RGB-D gazou kara no buttai kenshutsu] - Learning graph matching for object detection from RGB-D images , In 第20回ロボティクスシンポジア - Robotics Symposia (RS), 2015.
[] 
Optimizing the Relevance-Redundancy Tradeoff for Efficient Semantic Segmentation , In Scale Space and Variational Methods in Computer Vision (SSVM), 2015. ([code])
Oral Presentation [] 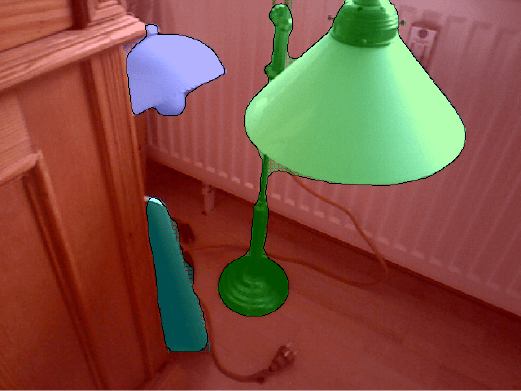
Interactive Multi-label Segmentation of RGB-D Images , In Scale Space and Variational Methods in Computer Vision (SSVM), 2015. ([code])
[] 
Learning Nonlinear Spectral Filters for Color Image Reconstruction , In IEEE International Conference on Computer Vision (ICCV), 2015.
2014
[] 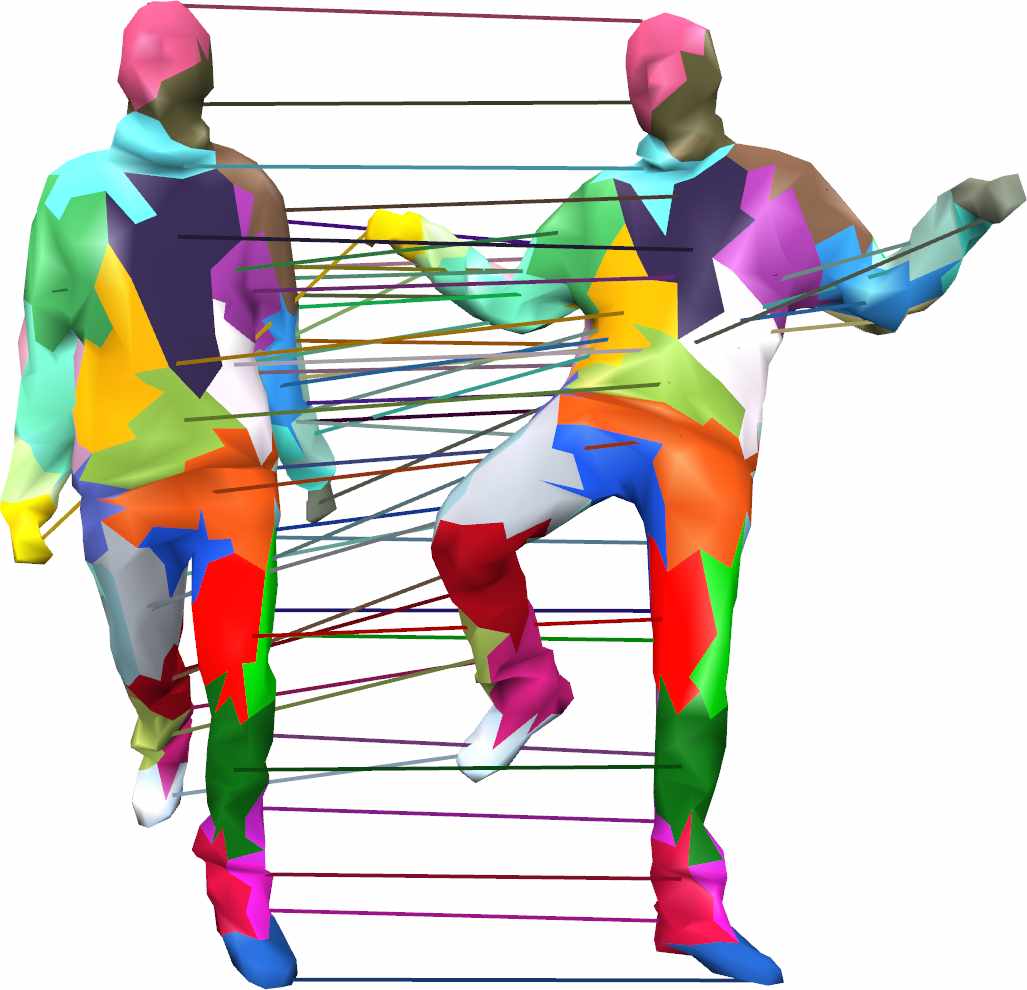
Dense Elastic 3D Shape Matching , In Global Optimization Methods, Springer, volume 8293, 2014.
[] Mobile Teleoperation Interfaces with Adjustable Autonomy for Personal Service Robots , In Proceedings of the 2014 ACM/IEEE International Conference on Human-robot Interaction, Advances in Computational Mathematics, 2014.
[] Local multi-resolution representation for 6D motion estimation and mapping with a continuously rotating 3D laser scanner , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2014.
[] Efficient deformable registration of multi-resolution surfel maps for object manipulation skill transfer , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2014.
[] Combining the Strengths of Sparse Interest Point and Dense Image Registration for RGB-D Odometry , In Proc. of the Joint 45th International Symposium on Robotics (ISR) and 8th German Conference on Robotics (ROBOTIK), 2014.
[] Local Multi-Resolution Surfel Grids for MAV Motion Estimation and 3D Mapping , In Proc. of the 13th International Conference on Intelligent Autonomous Systems (IAS), 2014.
[] Adaptive Tool-Use Strategies for Anthropomorphic Service Robots , In Proc. of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2014.
[] 
Towards Illumination-invariant 3D Reconstruction using ToF RGB-D Cameras , In International Conference on 3D Vision (3DV), 2014. ([supplementary])
[] 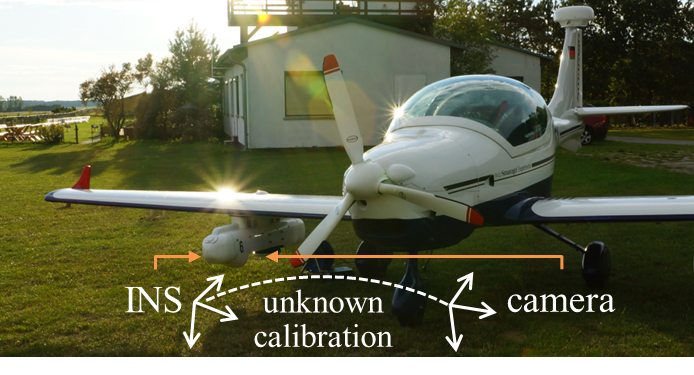
INS-Camera Calibration without Ground Control Points , In 9th IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF), 2014.
[] 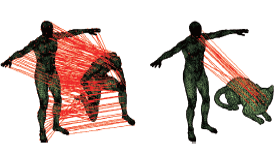
Learning Similarities for Rigid and Non-Rigid Object Detection , In International Conference on 3D Vision (3DV), 2014.
[] 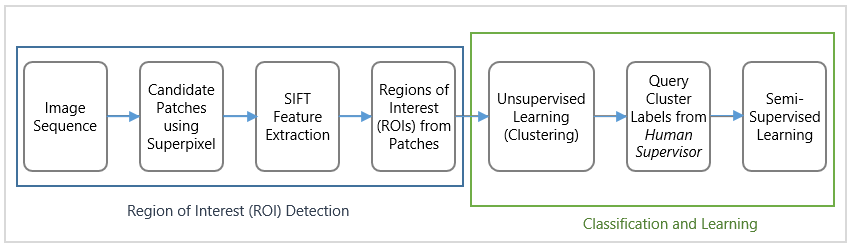
Environment-adaptive Learning: How Clustering Helps to Obtain Good Training Data , In KI 2014: Advances in Artificial Intelligence (C Lutz, M Thielscher, eds.), Springer, 2014.
[] 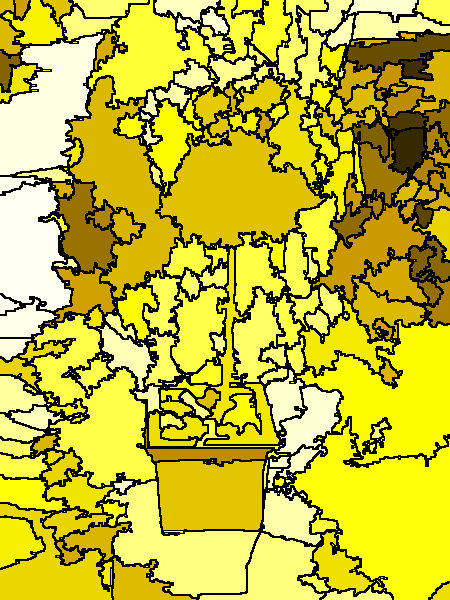
Active Online Learning for Interactive Segmentation Using Sparse Gaussian Processes , In German Conference on Pattern Recognition, 2014.
[] 
Visual-Inertial Navigation for a Camera-Equipped 25g Nano-Quadrotor , In IROS2014 Aerial Open Source Robotics Workshop, 2014.
[] 
Anisotropic Laplace-Beltrami Operators for Shape Analysis , In Sixth Workshop on Non-Rigid Shape Analysis and Deformable Image Alignment (NORDIA), 2014.
[] 
対応点集合類似度学習を用いた剛体・非剛体物体検出 [Taiou tenshuugou ruijido gakushuu wo mochiita goutai-higoutai buttai kenshutsu] , In 信学技報 - Pattern Recognition and Media Understanding (PRMU), volume 114, 2014.
[] 
RGB-D画像からの物体検出における対応点集合類似度の学習 [RGB-D gazou kara no buttai kenshutsu ni okeru taiou tenshuugou ruijido no gakushuu] , In 第32回日本ロボット学会学術講演会 - The Robotics Society of Japan (RSJ), 2014.
2015 研究奨励賞 Encouragement Award [] 
Real-Time Minimization of the Piecewise Smooth Mumford-Shah Functional , In European Conference on Computer Vision (ECCV), 2014. (Code available)
[] 
Generalized Connectivity Constraints for Spatio-temporal 3D Reconstruction , In European Conference on Computer Vision (ECCV), 2014.
[] 
Co-Sparse Textural Similarity for Interactive Segmentation , In European Conference on Computer Vision (ECCV), 2014.
[] 
Surface Normal Integration for Convex Space-time Multi-view Reconstruction , In British Machine Vision Conference (BMVC), 2014.
[] 
Spatial and Temporal Interpolation of Multi-View Image Sequences , In German Conference on Pattern Recognition (GCPR), volume 36, 2014.
[] 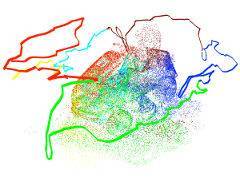
Submap-based Bundle Adjustment for 3D Reconstruction from RGB-D Data , In German Conference on Pattern Recognition (GCPR), 2014. ([slides])
Oral Presentation [] 
Flow and Color Inpainting for Video Completion , In German Conference on Pattern Recognition (GCPR), 2014.
Oral Presentation [] 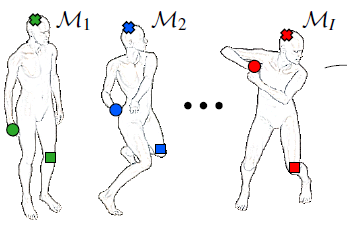
Optimal Intrinsic Descriptors for Non-Rigid Shape Analysis , In British Machine Vision Conference (BMVC), 2014.
[] 
Semi-Dense Visual Odometry for AR on a Smartphone , In International Symposium on Mixed and Augmented Reality, 2014.
Best Short Paper Award [] 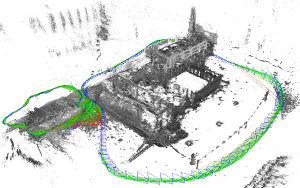
LSD-SLAM: Large-Scale Direct Monocular SLAM , In European Conference on Computer Vision (ECCV), 2014.
Oral Presentation [] 
Collision Avoidance for Quadrotors with a Monocular Camera , In Proc. of The 12th International Symposium on Experimental Robotics (ISER), 2014.
[] 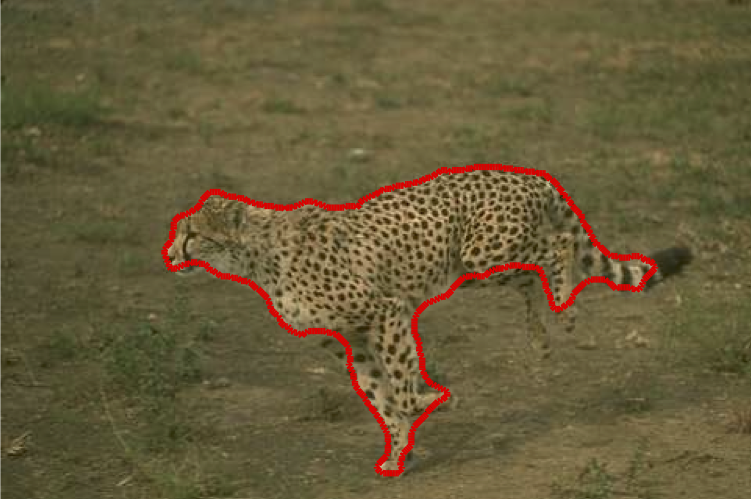
Sequential Convex Relaxation for Mutual-Information-Based Unsupervised Figure-Ground Segmentation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2014.
[] 
Dense Non-Rigid Shape Correspondence Using Random Forests , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2014.
[] 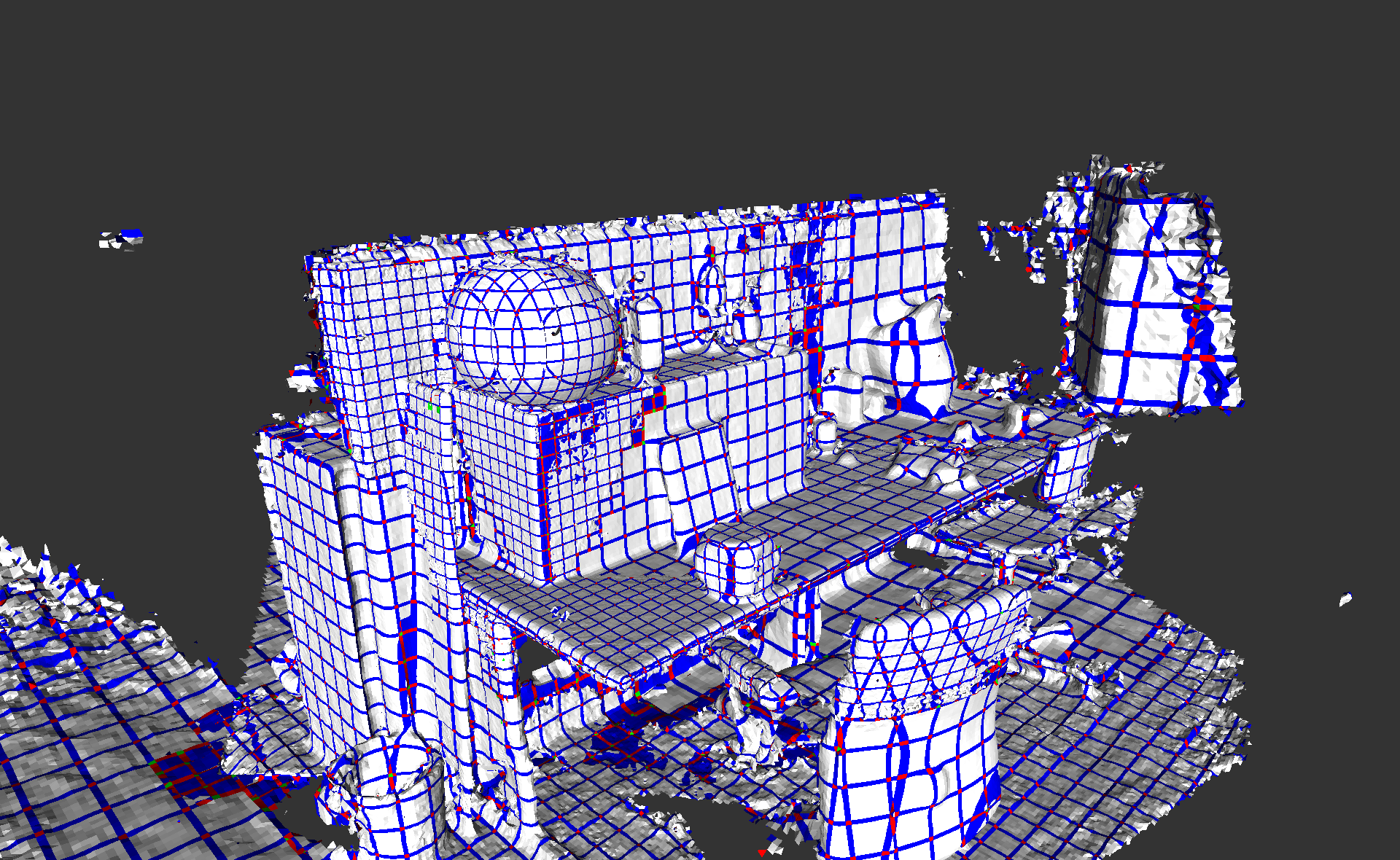
Volumetric 3D Mapping in Real-Time on a CPU , In International Conference on Robotics and Automation (ICRA), 2014.
[] 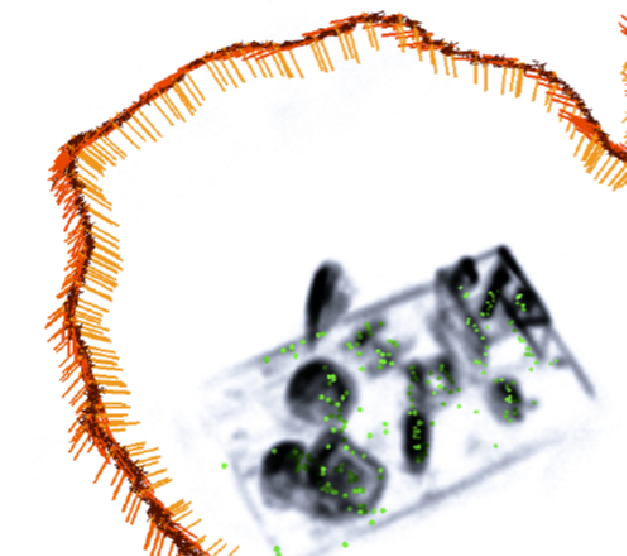
Event-based 3D SLAM with a depth-augmented dynamic vision sensor , In International Conference on Robotics and Automation (ICRA), 2014.
[] Improved Diffusion Kurtosis Imaging and Direct Propagator Estimation Using 6-D Compressed Sensing , In Organization for Human Brain Mapping (OHBM) Annual Meeting, 2014.
[] Semi-Joint Reconstruction for Diffusion MRI Denoising Imposing Similarity of Edges in Similar Diffusion-Weighted Images , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2014.
[] Direct Reconstruction of the Average Diffusion Propagator with Simultaneous Compressed-Sensing-Accelerated Diffusion Spectrum Imaging and Image Denoising by Means of Total Generalized Variation Regularization , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2014.
[] Total Variation-Regularized Compressed Sensing Reconstruction for Multi-Shell Diffusion Kurtosis Imaging , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2014.
[] Novel Acquisition Scheme for Diffusion Kurtosis Imaging Based on Compressed-Sensing Accelerated DSI Yielding Superior Image Quality , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2014.
2013
[] 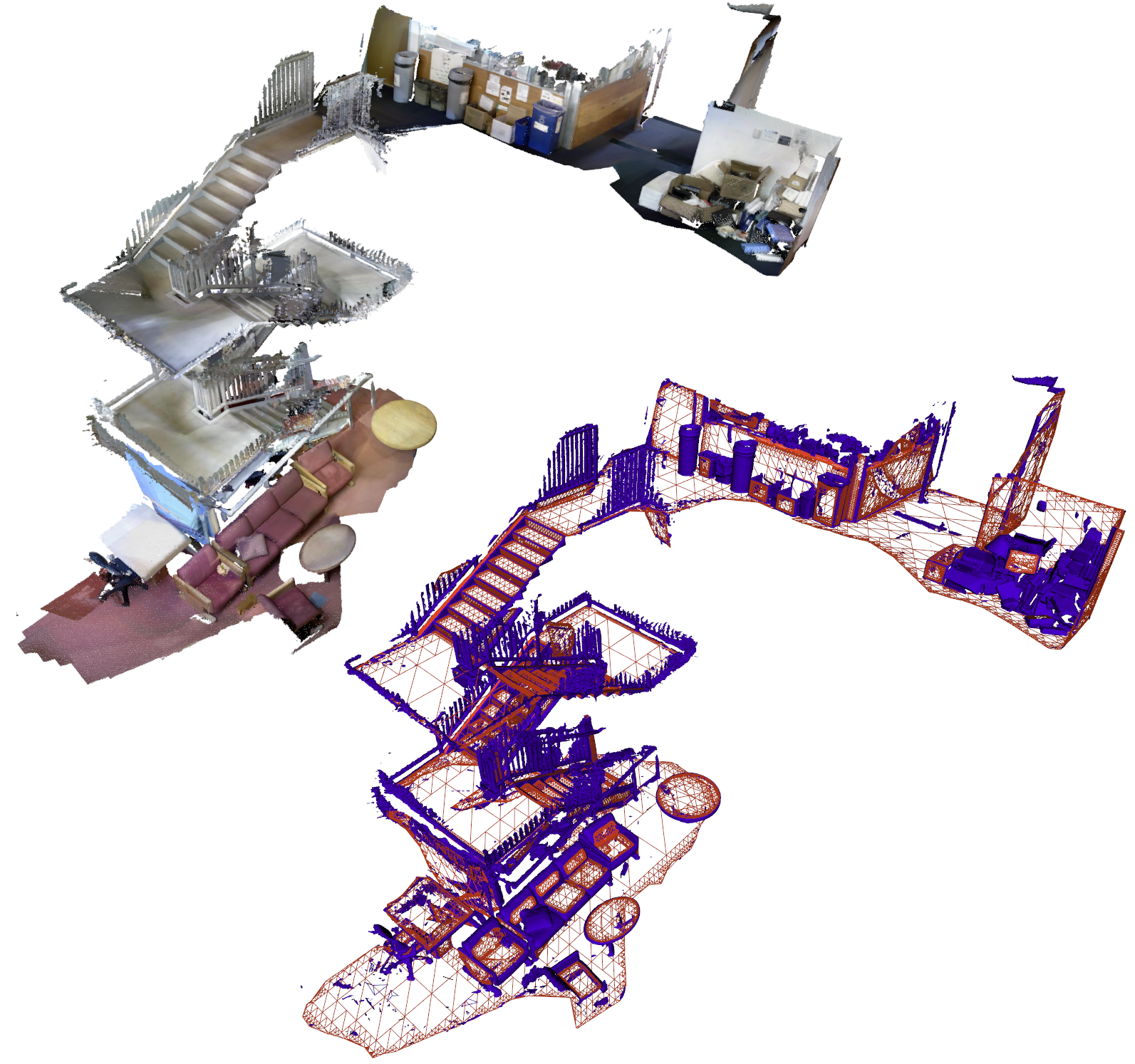
Planar simplification and texturing of dense point cloud maps , In Mobile Robots (ECMR), 2013 European Conference on, 2013.
[] 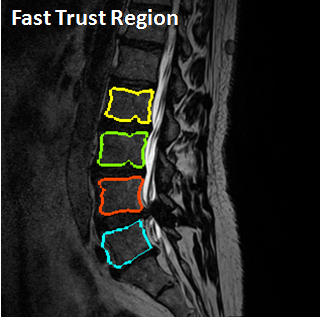
Fast Trust Region for Segmentation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2013.
[] Mobile bin picking with an anthropomorphic service robot , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2013.
[] Hierarchical Object Discovery and Dense Modelling From Motion Cues in RGB-D Video , In Proc. of the 23rd International Joint Conference on Artificial Intelligence (IJCAI), IJCAI/AAAI, 2013.
[] Combining contour and shape primitives for object detection and pose estimation of prefabricated parts , In Proc. of the 20th IEEE International Conference on Image Processing (ICIP), 2013.
[] Distinctive 3D surface entropy features for place recognition. , In Proc. of the European Conference on Mobile Robots (ECMR), IEEE, 2013.
[] Joint detection and pose tracking of multi-resolution surfel models in RGB-D , In Proc. of the European Conference on Mobile Robots (ECMR), IEEE, 2013.
[] Efficient Dense 3D Rigid-Body Motion Segmentation in RGB-D Video , In Proc. of the British Machine Vision Conference (BMVC), 2013.
[] Multi-resolution surfel mapping and real-time pose tracking using a continuously rotating 2D laser scanner , In Proc. of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2013.
[] 
Relaxations for Minimizing Metric Distortion and Elastic Energies for 3D Shape Matching , In Actes des recontres du CIRM: Courbure discrete: théorie et applications, volume 3, 2013.
[] Driven Learning for Driving: How Introspection Improves Semantic Mapping , In The International Symposium on Robotics Research (ISRR), 2013.
[] 
Interactive Person Following and Gesture Recognition with a Flying Robot , In Proc. of the Assistance and Service Robotics Workshop (ASROB) at the IEEE. Int. Conf. on Intelligent Robots and Systems (IROS), 2013.
[] 
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 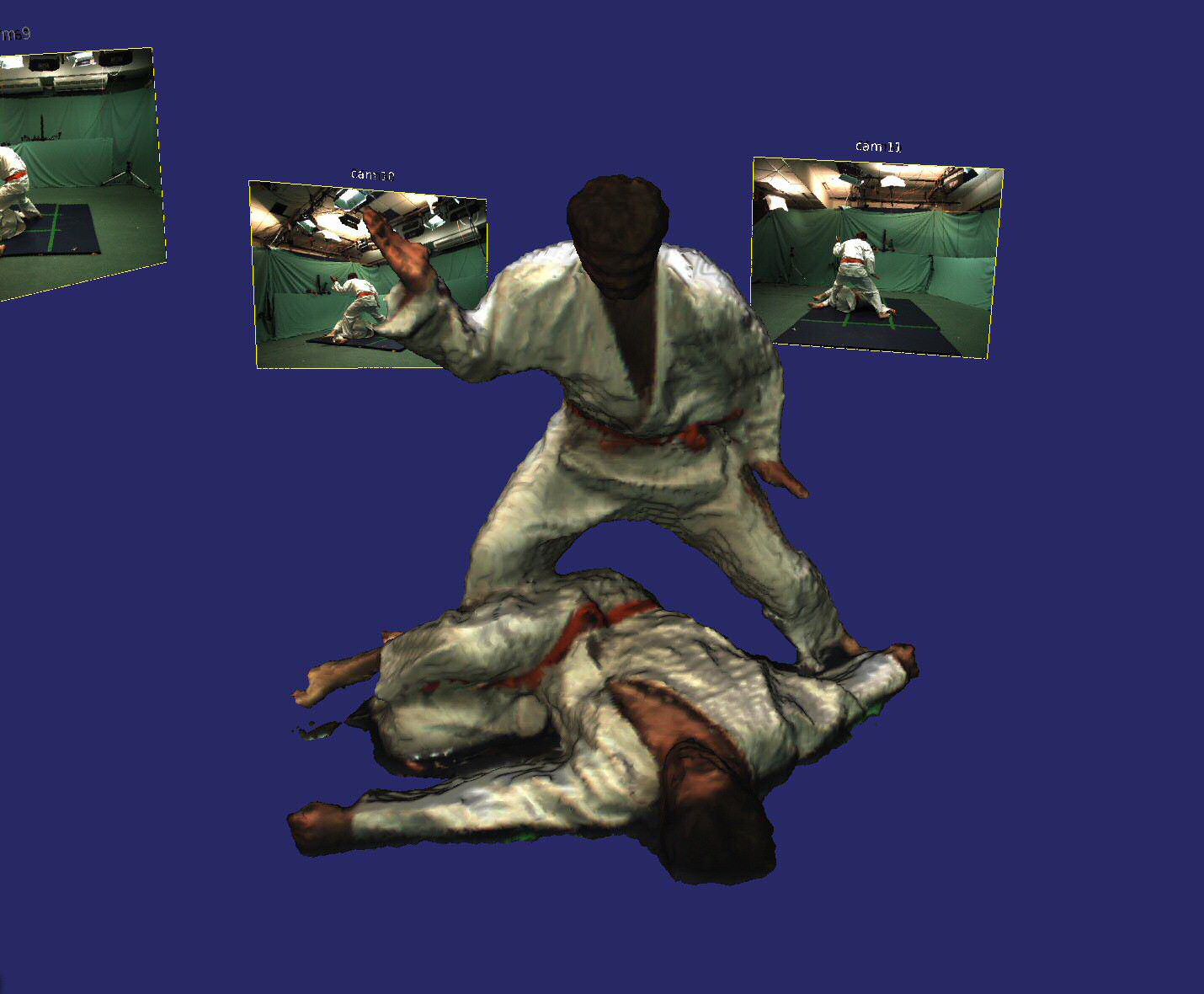
A Convex Relaxation Approach to Space Time Multi-view 3D Reconstruction , In ICCV Workshop on Dynamic Shape Capture and Analysis (4DMOD), 2013.
[] 
Fast and Accurate Large-scale Stereo Reconstruction using Variational Methods , In ICCV Workshop on Big Data in 3D Computer Vision, 2013.
[] 
Tree Shape Priors with Connectivity Constraints using Convex Relaxation on General Graphs , In IEEE International Conference on Computer Vision (ICCV), 2013.
Oral Presentation [] 
Proportion Priors for Image Sequence Segmentation , In IEEE International Conference on Computer Vision (ICCV), 2013. (oral presentation)
[] 
Total Variation Regularization for Functions with Values in a Manifold , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 
Elastic Net Constraints for Shape Matching , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 
Semi-Dense Visual Odometry for a Monocular Camera , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 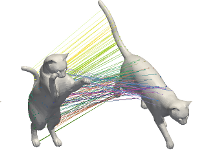
Efficient Shape Matching using Vector Extrapolation , In British Machine Vision Conference (BMVC), 2013.
[] CopyMe3D: Scanning and Printing Persons in 3D , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
Graph-based bundle adjustment for INS-camera calibration , In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
Best research paper award [] 
Dense Tracking and Mapping with a Quadrocopter , In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
[] 
Scale-Aware Object Tracking with Convex Shape Constraints on RGB-D Images , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
FollowMe: Person Following and Gesture Recognition with a Quadrocopter , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Dense Visual SLAM for RGB-D Cameras , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Efficient Convex Optimization for Minimal Partition Problems with Volume Constraints , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), 2013.
[] 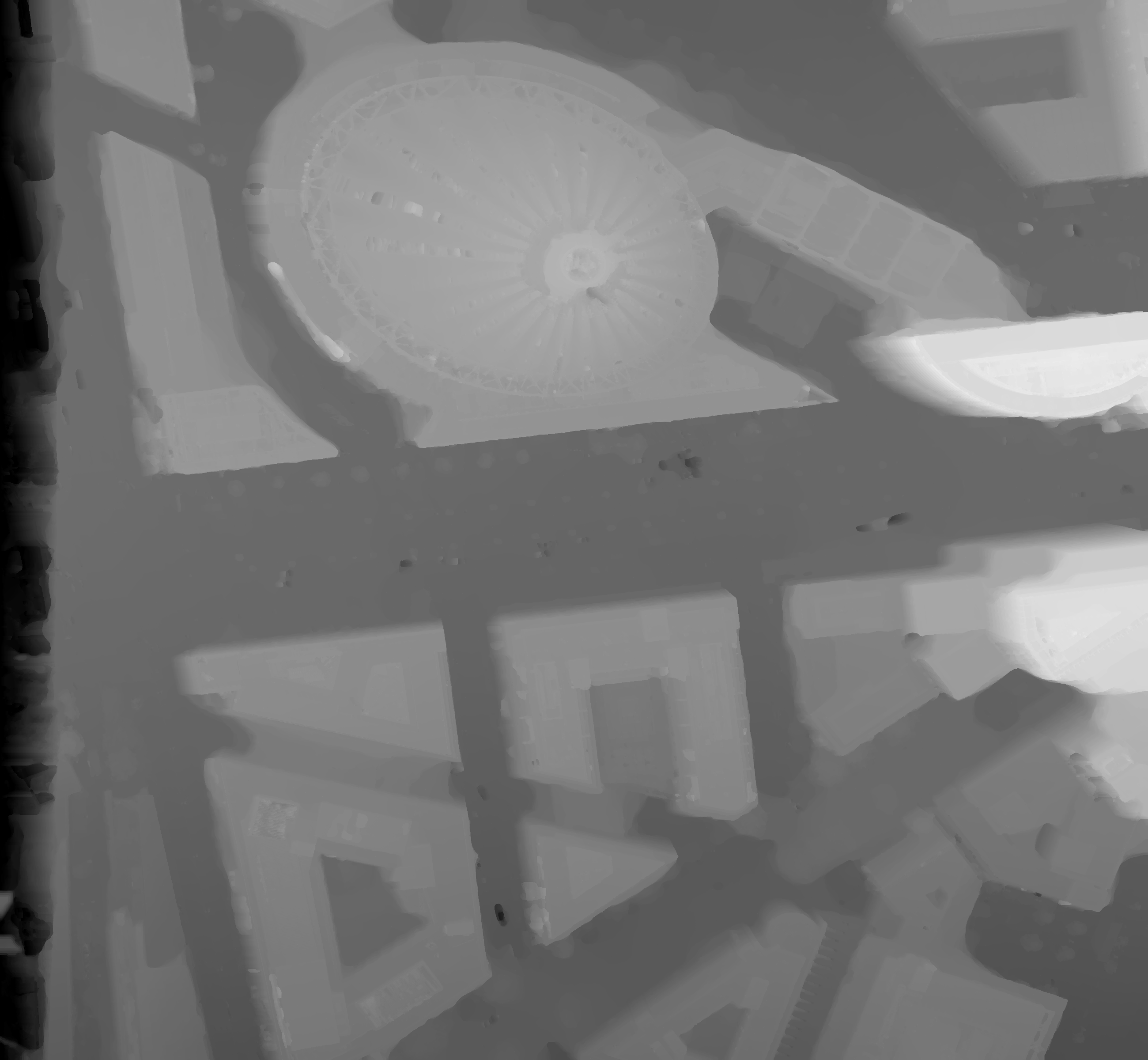
Performance Evaluation of Narrow Band Methods for Variational Stereo , In 35th German Conference on Pattern Recognition (GCPR), 2013.
[] 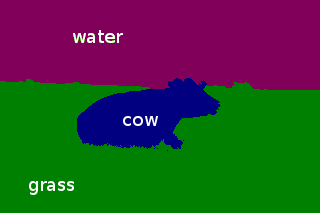
A Co-occurrence Prior for Continuous Multi-Label Optimization , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), 2013.
[] 
Learning Probabilistic Models for Mobile Manipulation Robots , In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), Track on Best papers in Sister Conferences, 2013.
[] 
Direct Camera Pose Tracking and Mapping With Signed Distance Functions , In Demo Track of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2013.
[] 
Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions , In Robotics: Science and Systems Conference (RSS), 2013.
[] Introspective Active Learning for Scalable Semantic Mapping , In Workshop on Active Learning in Robotics: Exploration, Curiosity, and Interaction at Robotics: Science and Systems, 2013.
[] Confidence Boosting: Improving the Introspectiveness of a Boosted Classifier for Efficient Learning , In Autonomous Learning Workshop at ICRA, 2013.
[] 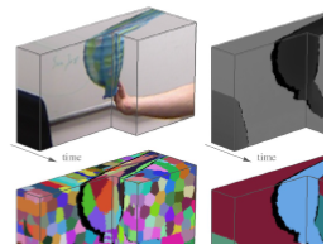
Depth-adative Supervoxels for RGB-D Video Segmentation , In Proceedings of the IEEE International Conference on Image Processing, 2013.
[] Knowing When We Don’t Know: Introspective Classification for Mission-Critical Decision Making , In IEEE International Conference on Robotics and Automation (ICRA), 2013.
[] Toward Automated Driving in Cities using Close-to-Market Sensors , In Proc. of IEEE Intelligent Vehicles Symposium, 2013.
[] 
Volume Constraints for Single View Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2013.
[] 
Robust Odometry Estimation for RGB-D Cameras , In International Conference on Robotics and Automation (ICRA), 2013.
Best Vision Paper Award - Finalist [] Noise Reduction in Accelerated Diffusion Spectrum Imaging through Integration of SENSE Reconstruction into Joint Reconstruction in Combination with q-Space Compressed Sensing , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2013.
[] Phase Sensitive Reconstruction in Diffusion Spectrum Imaging Enabling Velocity Encoding and Unbiased Noise Distribution , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2013.
[] SNR-dependent Quality Assessment of Compressed-Sensing-Accelerated Diffusion Spectrum Imaging Using a Fiber Crossing Phantom , In International Society for Magnetic Resonance in Medicine (ISMRM) Annual Meeting, 2013.
[] Corrected Joint SENSE Reconstruction, Low-Rank Constraints, and Compressed-Sensing-Accelerated Diffusion Spectrum Imaging in Denoising and Kurtosis Tensor Estimation , In ISMRM Workshop on Diffusion as a Probe of Neural Tissue Microstructure, 2013.
[] Reconstruction, Regularization, and Quality in Diffusion MRI Using the Example of Accelerated Diffusion Spectrum Imaging , In 16th Annual Meeting of the German Chapter of the ISMRM, 2013.
Oral Presentation [] Line-Process-Based Joint SENSE Reconstruction of Diffusion Images with Intensity Inhomogeneity Correction and Noise Non-Stationarity Correction , In European Society for Magnetic Resonance in Medicine and Biology (ESMRMB) Annual Meeting, 2013.
Certificate of Merit Award [] Effects of Low-Rank Constraints, Line-Process Denoising, and q-Space Compressed Sensing on Diffusion MR Image Reconstruction and Kurtosis Tensor Estimation , In European Society for Magnetic Resonance in Medicine and Biology (ESMRMB) Annual Meeting, 2013.
Oral Presentation [] 
Proximity Priors for Variational Semantic Segmentation and Recognition , In ICCV Workshop on Graphical Models for Scene Understanding, 2013.
[] 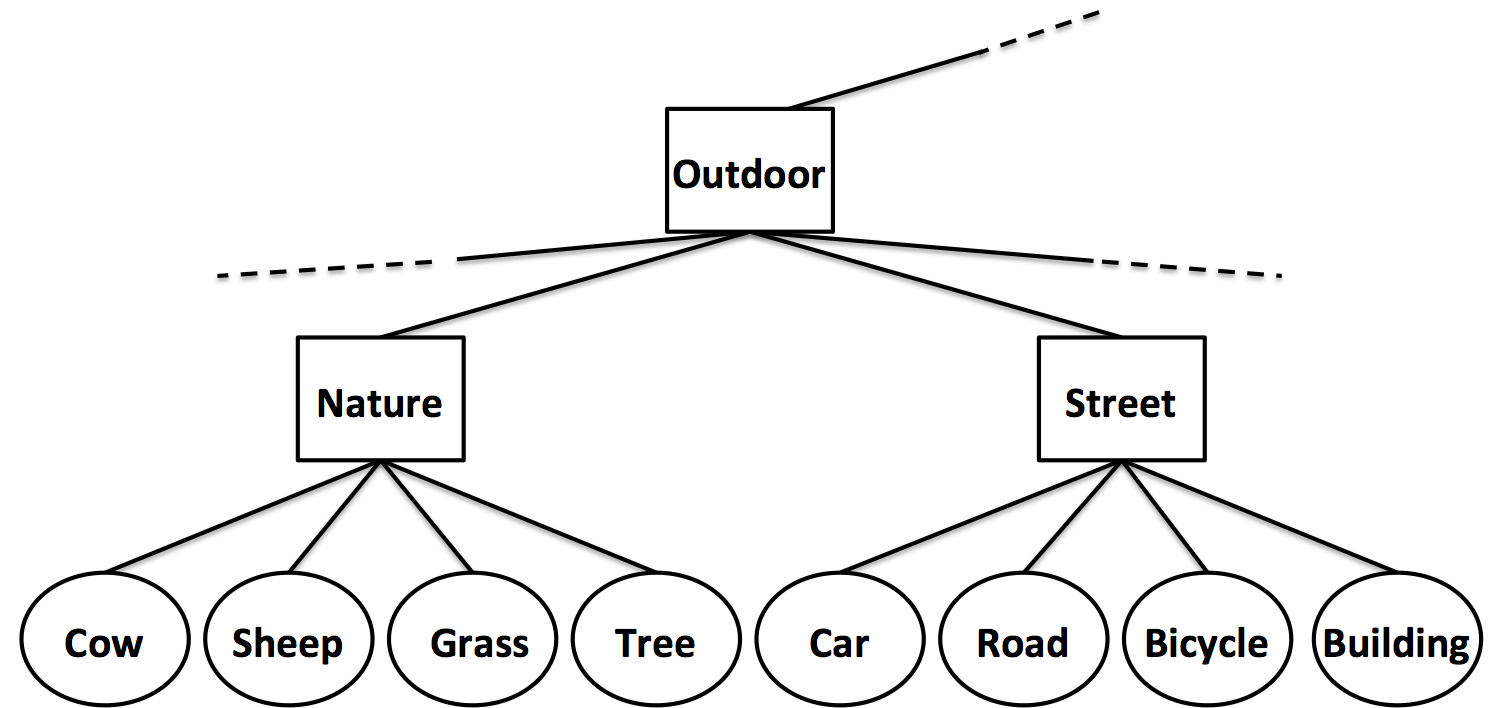
Convex Optimization for Scene Understanding , In ICCV Workshop on Graphical Models for Scene Understanding, 2013.
[] 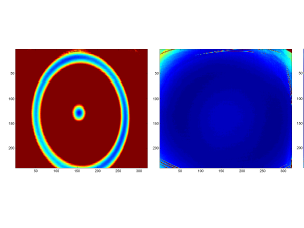
Can a fully unconstrained imaging model be applied effectively to central cameras? , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2013.
[] 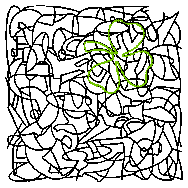
Top-down visual search in Wimmelbild , In Proceedings of SPIE, Human Vision and Electronic Imaging XVIII, 2013.
[] 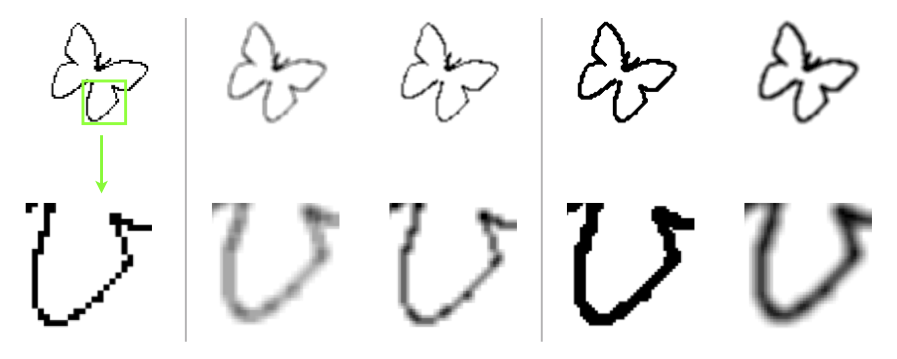
Wimmelbild Analysis with Approximate Curvature Coding Distance Images , In Scale Space and Variational Methods in Computer Vision (A. Kuijper, K. Bredies, T. Pock, H. Bischof, eds.), Springer, volume 7893, 2013.
Oral Presentation
2012
[] 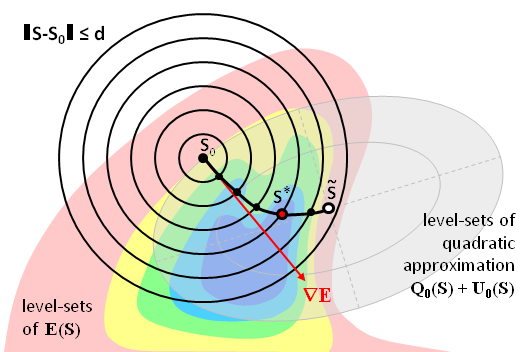
Segmentation with non-linear regional constraints via line-search cuts , In European Conference on Computer Vision (ECCV), Springer, volume 7572, 2012.
[] 
Hausdorff Distance Constraint for Multi-Surface Segmentation , In European Conference on Computer Vision (ECCV), Springer, volume 7572, 2012.
[] 
Furniture Classification using WWW CAD Models , In IROS'12 Workshop on Active Semantic Perception, 2012.
[] Robust Real-Time Registration of RGB-D Images using Multi-Resolution Surfel Representations , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Efficient Mobile Robot Navigation using 3D Surfel Grid Maps , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Shape-Primitive Based Object Recognition and Grasping , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Model Learning and Real-Time Tracking Using Multi-Resolution Surfel Maps , In , 2012.
[] Adaptive Multi-cue 3D Tracking of Arbitrary Objects , In DAGM/OAGM Symposium (A Pinz, T Pock, H Bischof, F Leberl, eds.), Springer, volume 7476, 2012.
[] SURE: Surface Entropy for Distinctive 3D Features , In Proc. of Spatial Cognition, 2012.
[] Adjustable autonomy for mobile teleoperation of personal service robots , In Proc. of the IEEE Int. Symp. on Robot and Human Interactive Communication, 2012.
[] Integrating depth and color cues for dense multi-resolution scene mapping using RGB-D cameras , In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2012.
[] Semantic mapping using object-class segmentation of RGB-D images , In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2012.
[] Bayesian calibration of the hand-eye kinematics of an anthropomorphic robot , In Proc. of the 12th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2012.
[] Parsing Outdoor Scenes from Streamed 3D Laser Data Using Online Clustering and Incremental Belief Updates , In Robotics Track of AAAI Conference on Artificial Intelligence, 2012.
[] Semantic Categorization of Outdoor Scenes with Uncertainty Estimates using Multi-Class Gaussian Process Classification , In Proc. of the International Conference on Intelligent Robots and Systems (IROS), 2012.
[] 
Wehrli 2.0: An Algorithm for ”Tidying up Art” , In VISART “Where Computer Vision Meets Art” workshop, ECCV 2012, Springer, 2012.
[] Comparison of Diffusion Kurtosis Tensor Estimation Methods in an Advanced Quality Assessment Framework , In European Society for Magnetic Resonance in Medicine and Biology (ESMRMB) Annual Meeting, 2012.
[] Evaluation of DSI Imaging with Compressed Sensing under the Presence of Different Noise Levels on a Diffusion Phantom , In European Society for Magnetic Resonance in Medicine and Biology (ESMRMB) Annual Meeting, 2012.
[] 
Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark , In Proc. of the Workshop on Color-Depth Camera Fusion in Robotics at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing , In Proc. of the Workshop on Visual Control of Mobile Robots (ViCoMoR) at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
A Benchmark for the Evaluation of RGB-D SLAM Systems , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Camera-Based Navigation of a Low-Cost Quadrocopter , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
A Convex Representation for the Vectorial Mumford-Shah Functional , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012.
[] 
Fast and Globally Optimal Single View Reconstruction of Curved Objects , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012.
[] 
QPBOアルゴリズムの多値化による非劣モジュラエネルギー最小化 [QPBO arugorizumu no tachika ni yoru hiretsu mojura enerugī saishōka] , In Meeting on Image Recognition and Understanding, 2012.
[] 
Generalized Roof Duality for Multi-Label Optimization: Optimal Lower Bounds and Persistency , In European Conference on Computer Vision (ECCV), 2012.
[] 
Nonmetric Priors for Continuous Multilabel Optimization , In European Conference on Computer Vision (ECCV), Springer, 2012.
[] 
Real-Time Human Motion Tracking using Multiple Depth Cameras , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 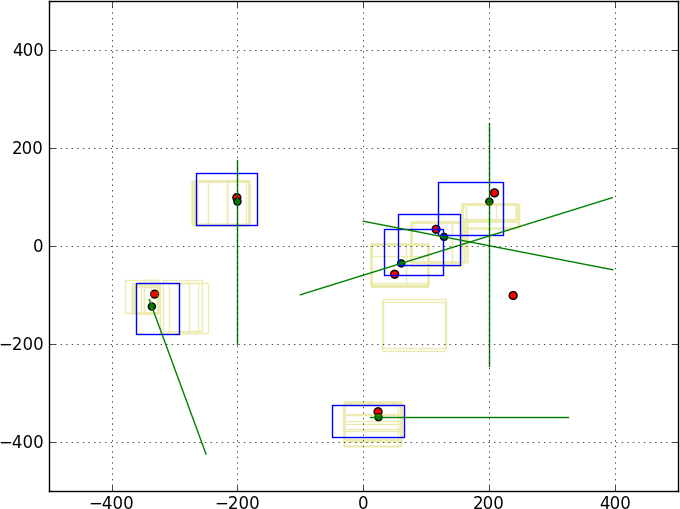
Box-Particle PHD Filter for Multi-Target Tracking , In 15th International Conference on Information Fusion (FUSION), 2012.
[] 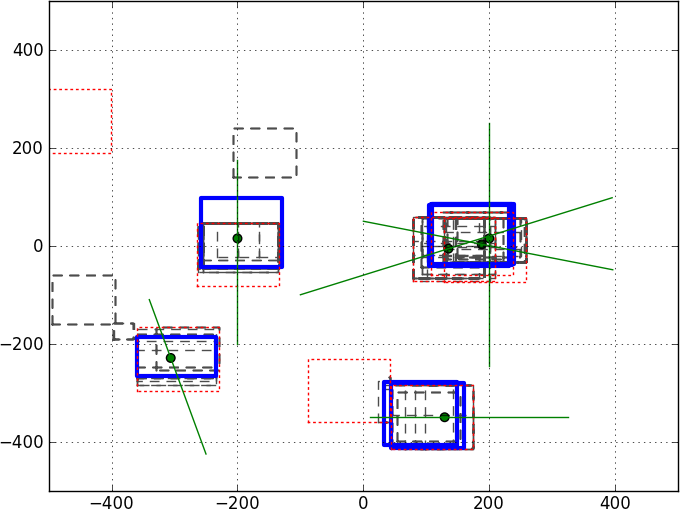
Box-Particle Intensity Filter , In 9th IET Data Fusion and Target Tracking Conference, 2012.
[] 
Nonparametric Bayesian Models for Unsupervised Scene Analysis and Reconstruction , In Proceedings of Robotics: Science and Systems, 2012.
[] 
A Generalized Framework for Opening Doors and Drawers in Kitchen Environments , In International Conference on Robotics and Automation (ICRA), 2012.
[] 
An Evaluation of the RGB-D SLAM System , In International Conference on Robotics and Automation (ICRA), 2012.
[] 
A game-theoretic approach to deformable shape matching , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012.
2011
[] 
Interactive Segmentation with Super-Labels , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), Springer, volume 6819, 2011.
[] 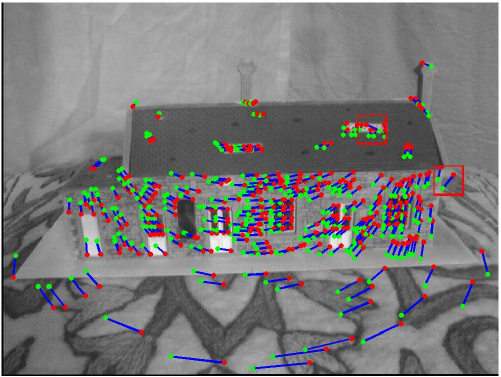
Multilinear Model Estimation with L2-Regularization , In Pattern Recognition (Proc. DAGM), Springer, volume 6835, 2011.
[] Learning to Interpret Pointing Gestures with a Time-of-flight Camera , In Proceedings of the 6th International Conference on Human-robot Interaction, Advances in Computational Mathematics, 2011.
[] Interest point detection in depth images through scale-space surface analysis , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] Towards joint attention for a domestic service robot - person awareness and gesture recognition using Time-of-Flight cameras , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] Compliant Task-Space Control with Back-Drivable Servo Actuators , In RoboCup (T Röfer, NM Mayer, J Savage, U Saranli, eds.), Springer, volume 7416, 2011.
[] Real-Time 3D Perception and Efficient Grasp Planning for Everyday Manipulation Tasks. , In Proc. of the European Conf. on Mobile Robots (ECMR), 2011.
[] Following human guidance to cooperatively carry a large object , In Proc. of the 11th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2011.
[] Efficient Multi-resolution Plane Segmentation of 3D Point Clouds , In Proc. of the Int. Conf. on Intelligent Robotics and Applications (ICIRA) (S Jeschke, H Liu, D Schilberg, eds.), Springer Berlin Heidelberg, volume 7102, 2011.
[] Bayesian On-line Learning of Driving Behaviors , In International Conference on Robotics and Automation (ICRA), 2011.
[] Unsupervised 3D Object Discovery and Categorization for Mobile Robots , In Proc. of the International Symposium on Robotics Research (ISRR), 2011.
[] 
A Survey on Geometry Recovery from a Single Image with Focus on Curved Object Reconstruction , In Proceedings of the 2011 Conference on Innovations for Shape Analysis: Models and Algorithms, Springer-Verlag, 2011.
[] 
Silhouette-Based Variational Methods for Single View Reconstruction , In Proceedings of the 2010 international conference on Video Processing and Computational Video (D. Cremers, M. A. Magnor, M. R. Oswald, L. Zelnik-Manor, eds.), Springer-Verlag, 2011.
[] 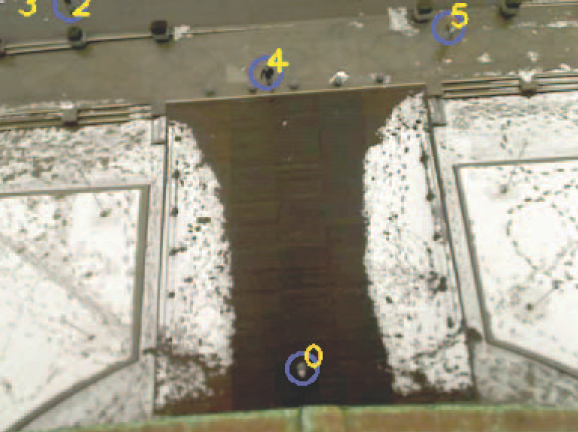
Multi-object tracking via high accuracy optical flow and finite set statistics , In International Conference on Acoustics, Speech and Signal Processing (ICASSP), 2011.
[] 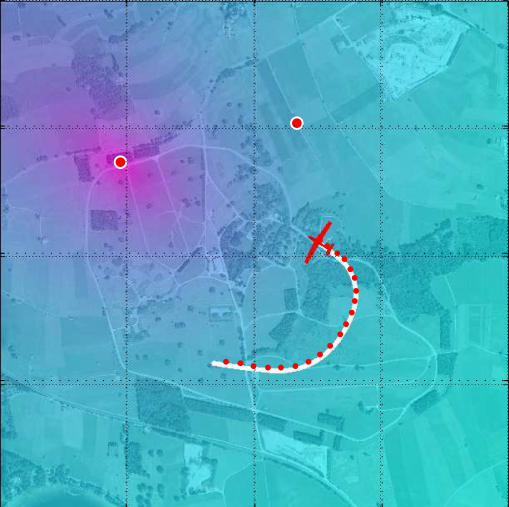
Multiple Emitter Localization Using a Realistic Airborne Array Sensor , In 14th International Conference on Information Fusion (FUSION), 2011.
[] 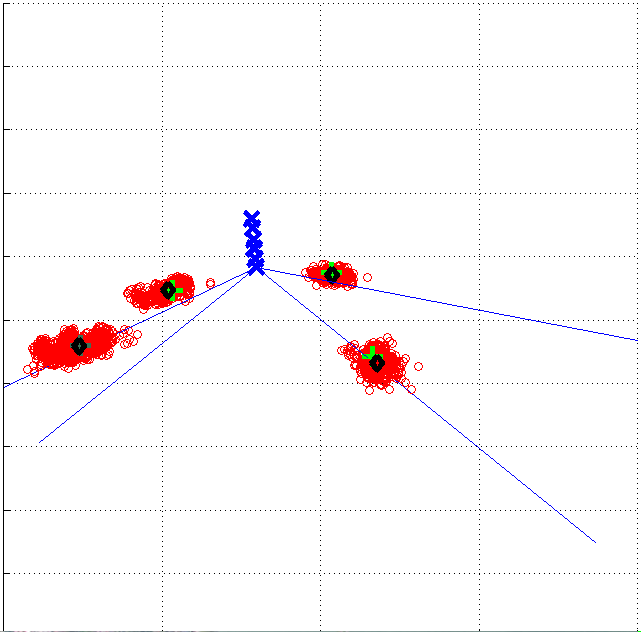
Sequential Monte Carlo Method for the iFilter , In 14th International Conference on Information Fusion (FUSION), 2011.
[] 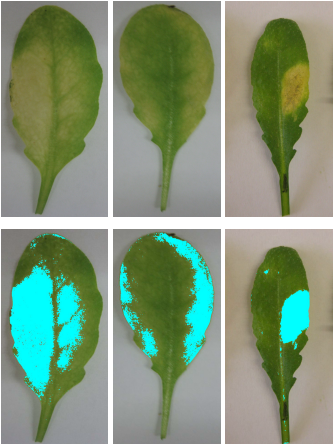
Pixel-based Classification Method for Detecting Unhealthy Regions in Leaf Images , In 6th IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF), 2011.
[] 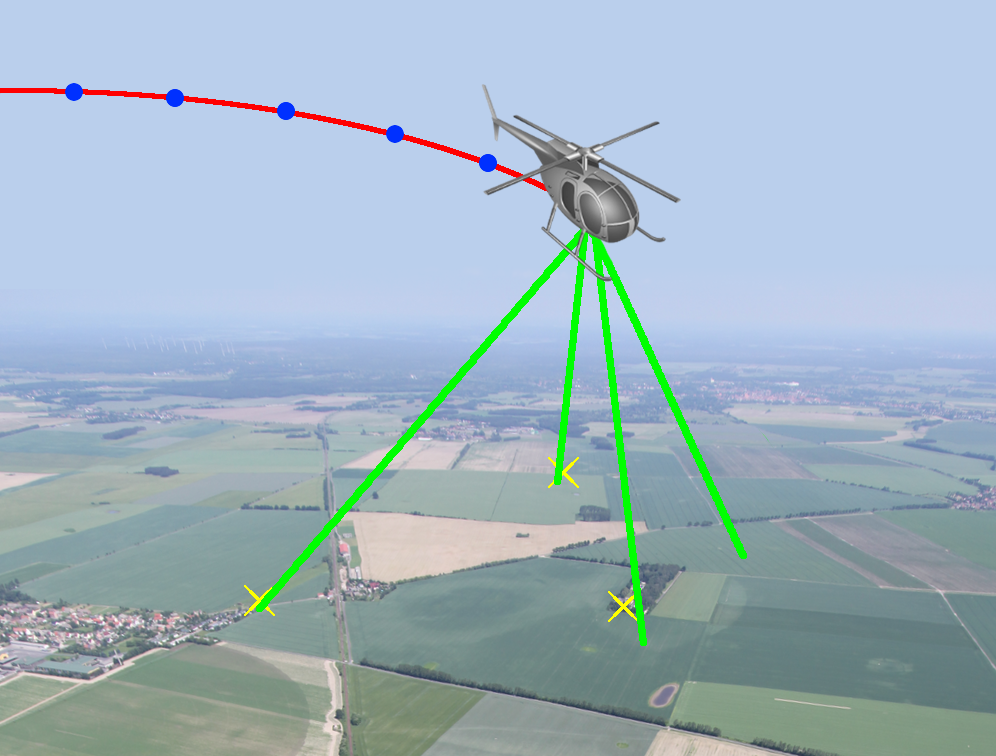
Multiple Source Localization Based on Biased Bearings Using the Intensity Filter - Approach and Experimental Results , In 4th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing, 2011.
[] 
Mobile Manipulation of Kitchen Containers , In Proc. of the IROS'11 Workshop on Results, Challenges and Lessons Learned in Advancing Robots with a Common Platform, 2011.
[] 
Real-Time Visual Odometry from Dense RGB-D Images , In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
[] 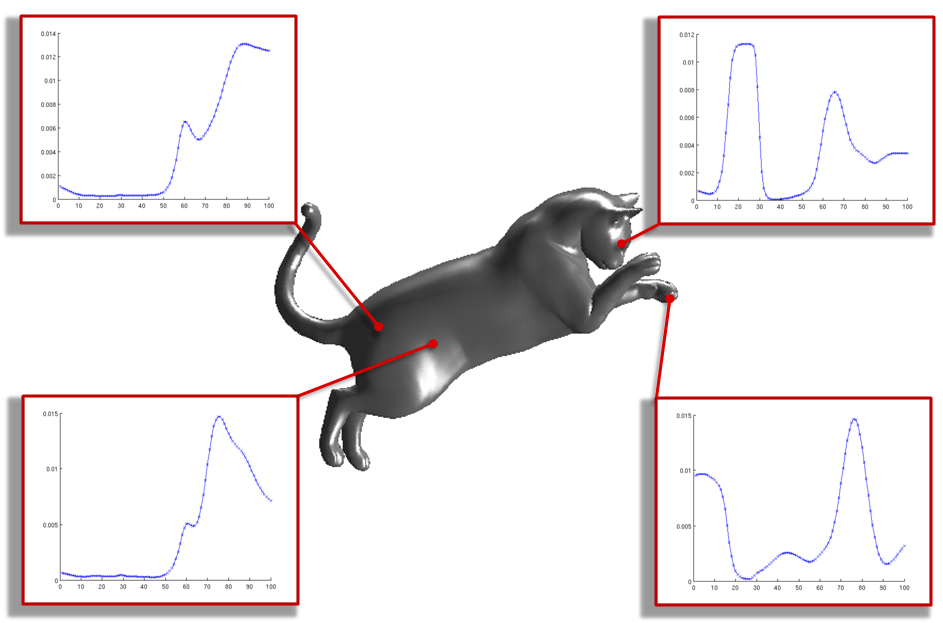
The Wave Kernel Signature: A Quantum Mechanical Approach To Shape Analysis , In IEEE International Conference on Computer Vision (ICCV) - Workshop on Dynamic Shape Capture and Analysis (4DMOD), 2011.
[] 
A Convex Framework for Image Segmentation with Moment Constraints , In IEEE International Conference on Computer Vision (ICCV), 2011.
[] 
Space-Varying Color Distributions for Interactive Multiregion Segmentation: Discrete versus Continuous Approaches , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), 2011.
[] 
Towards a benchmark for RGB-D SLAM evaluation , In Proc. of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at Robotics: Science and Systems Conf. (RSS), 2011.
[] 
Real-time 3D visual SLAM with a hand-held camera , In Proc. of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, 2011.
[] 
Learning the State Transition Model to Efficiently Clean Surfaces with Mobile Manipulation Robots , In Proc. of the Workshop on Manipulation under Uncertainty at the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] 
Generalized Ordering Constraints for Multilabel Optimization , In IEEE International Conference on Computer Vision (ICCV), 2011. (oral presentation)
[] 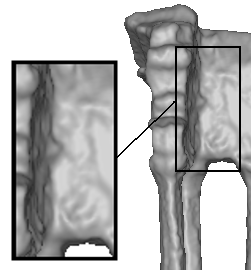
Decoupling Photometry and Geometry in Dense Variational Camera Calibration , In IEEE International Conference on Computer Vision (ICCV), 2011.
[] 
Tight Convex Relaxations for Vector-Valued Labeling Problems , In IEEE International Conference on Computer Vision (ICCV), 2011.
[] 
Introducing Total Curvature for Image Processing , In IEEE International Conference on Computer Vision (ICCV), 2011.
[] 
Total Variation for Cyclic Structures: Convex Relaxation and Efficient Minimization , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2011.
[] 
On a linear programming approach to the discrete Willmore boundary value problem and generalizations , In Curves and Surfaces 2011 (J.-D. Bet al., ed.), 2011.
[] 
Pose-Consistent 3D Shape Segmentation Based on a Quantum Mechanical Feature Descriptor , In Pattern Recognition (Proc. DAGM), Springer, 2011.
[] 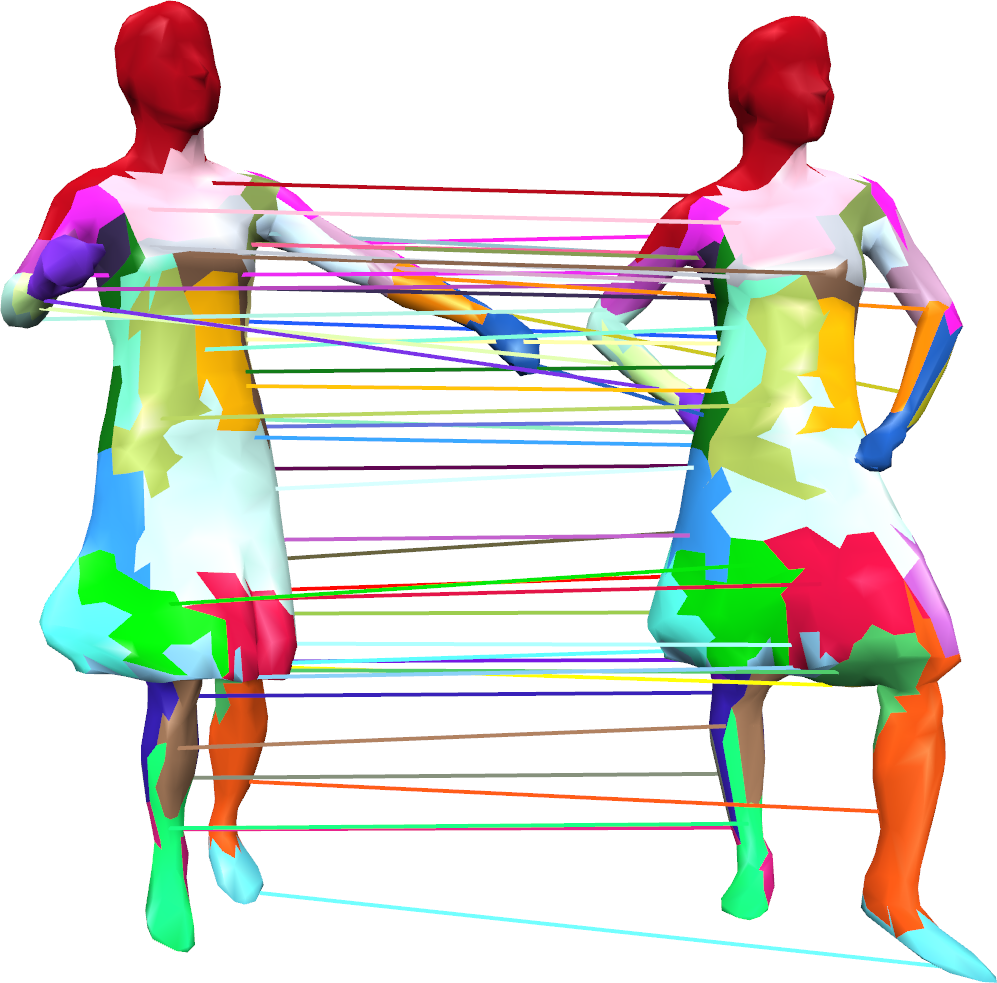
Geometrically Consistent Elastic Matching of 3D Shapes: A Linear Programming Solution , In IEEE International Conference on Computer Vision (ICCV), 2011.
[] 
Sampling Relevant Points for Surface Registration , In International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), 2011.
[] 
A Non-Cooperative Game for 3D Object Recognition in Cluttered Scenes , In International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission (3DIMPVT), 2011.
[] 
RUNE-Tag: a High Accuracy Fiducial Marker with Strong Occlusion Resilience , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2011.
[] 
Multiview Registration via Graph Diffusion of Dual Quaternions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2011.
2010
[] 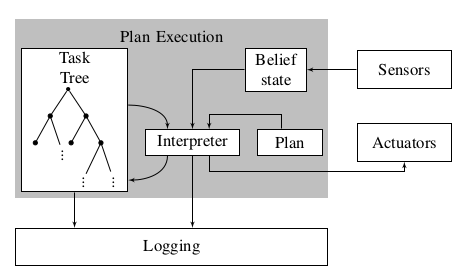
Becoming action-aware through reasoning about logged plan execution traces , In International Conference on Intelligent Robots and Systems (IROS), 2010.
[] Using Time-of-Flight cameras with active gaze control for 3D collision avoidance , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2010.
[] Improving indoor navigation of autonomous robots by an explicit representation of doors , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2010.
[] Intuitive Multimodal Interaction for Domestic Service Robots , In Proc. of the ISR/ROBOTIK, VDE Verlag, 2010.
[] Learning Motion Skills from Expert Demonstrations and Own Experience using Gaussian Process Regression , In Proc. of the ISR/ROBOTIK, VDE Verlag, 2010.
[] Utilizing the Structure of Field Lines for Efficient Soccer Robot Localization , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Towards Semantic Scene Analysis with Time-of-flight Cameras , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Improving People Awareness of Service Robots by Semantic Scene Knowledge , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Combining depth and color cues for scale- and viewpoint-invariant object segmentation and recognition using Random Forests , In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2010.
[] Improving imitated grasping motions through interactive expected deviation learning , In Proc. of the 10th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2010.
[] Inferring the Semantics of Direction Signs in Public Places , In International Conference on Robotics and Automation (ICRA), 2010.
[] Unsupervised Discovery of Repetitive Objects , In International Conference on Robotics and Automation (ICRA), 2010.
[] A Layered Approach to People Detection in 3D Range Data , In special track on Physically Grounded AI of AAAI, 2010.
[] Segmentation and Unsupervised Part-based Discovery of Repetitive Objects , In Robotics: Science and Systems, 2010.
[] Exploiting Repetitive Object Patterns for Model Compression and Completion , In European Conference on Computer Vision, 2010.
[] 
A Bayesian Approach to Learning 3D Representations of Dynamic Environments , In Proc. of The 12th International Symposium on Experimental Robotics (ISER), Springer Press, 2010.
[] 
Operating Articulated Objects Based on Experience , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2010.
[] 
Tactile Object Class and Internal State Recognition for Mobile Manipulation , In International Conference on Robotics and Automation (ICRA), 2010.
[] 
Vision-based Detection for Learning Articulation Models of Cabinet Doors and Drawers in Household Environments , In International Conference on Robotics and Automation (ICRA), 2010.
[] 
3D Pose Estimation, Tracking and Model Learning of Articulated Objects from Dense Depth Video using Projected Texture Stereo , In Proc. of the Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2010.
[] 
Interactive Motion Segmentation , In Pattern Recognition (Proc. DAGM), Springer, volume 6376, 2010.
[] 
Complex Motion Models for Simple Optical Flow Estimation , In Pattern Recognition (Proc. DAGM), Springer, volume 6376, 2010.
[] 
Convex Relaxation for Multilabel Problems with Product Label Spaces , In European Conference on Computer Vision (ECCV), 2010.
[] 
An Approach to Vectorial Total Variation based on Geometric Measure Theory , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2010.
[] 
Parallel Generalized Thresholding Scheme for Live Dense Geometry from a Handheld Camera , In ECCV Workshop on Computer Vision on GPUs (CVGPU), 2010.
[] 
Real-Time Dense Geometry from a Handheld Camera , In Pattern Recognition (Proc. DAGM), 2010.
[] 
Anisotropic Minimal Surfaces Integrating Photoconsistency and Normal Information for Multiview Stereo , In European Conference on Computer Vision (ECCV), 2010.
[] 
Image-based 3D Modeling via Cheeger Sets , In Asian Conference on Computer Vision, 2010.
Received Honorable Mention Award [] 
Multi-target multi-sensor localization and tracking using passive antenna and optical sensors on UAVs , In SPIE Security + Defence, 2010.
[] 
Passive Multi-Object Localization and Tracking Using Bearing Data , In 13th International Conference on Information Fusion (FUSION), 2010.
[] 
Probabilistic Classification of Disease Symptoms caused by Salmonella on Arabidopsis Plants , In 5th IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF), 2010.
[] 
Loosely Distinctive Features for Robust Surface Alignment , In European Conference on Computer Vision (ECCV), 2010.
[] 
Robust Game-Theoretic Inlier Selection for Bundle Adjustment , In 5th International Symposium on 3D Data Processing, Visualization and Transmission (3DPVT), 2010.
Best Student Paper Award [] 
A Game-Theoretic Approach to Fine Surface Registration without Initial Motion Estimation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2010.
[] 
A Game-Theoretic Approach to the Enforcement of Global Consistency in Multi-View Feature Matching , In 13th International Workshop on Structural and Syntactic Pattern Recognition (SSPR), 2010.
[] 
Robust Figure Extraction on Textured Background: a Game-Theoretic Approach , In 20th International Conference on Pattern Recognition (ICPR), 2010.
[] 
A Game-Theoretic Approach to Robust Selection of Multi-View Point Correspondence , In 20th International Conference on Pattern Recognition (ICPR), 2010.
[] 
Robust Camera Calibration using Inaccurate Targets , In British Machine Vision Conference (BMVC), 2010.
2009
[] Dynamaid, an Anthropomorphic Robot for Research on Domestic Service Applications , In Proc. of the European Conference on Mobile Robots (ECMR), 2009.
[] Integrating indoor mobility, object manipulation, and intuitive interaction for domestic service tasks , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2009.
[] Medial Features for Superpixel Segmentation , In Proc. of the IAPR Conference on Machine Vision Applications (MVA), 2009.
[] Multiclass Multimodal Detection and Tracking in Urban Environments , In Proc. of Field and Service Robotics (FSR), 2009.
[] Detecting Pedestrians at Very Small Scales , In Proc. of the International Conference on Intelligent Robots and Systems (IROS), 2009.
[] 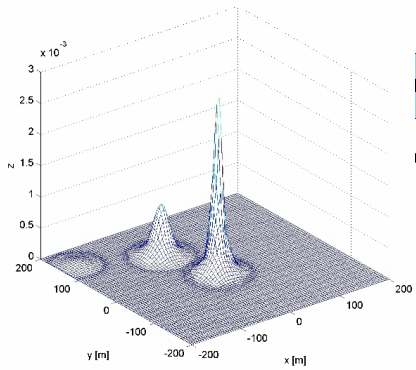
A Convex Formulation for Color Image Segmentation in the Context of Passive Emitter Localization , In 12th International Conference on Information Fusion (FUSION), 2009.
[] 
Global Optimal Multiple Object Detection using the Fusion of Shape and Color Information , In 7th International Conference on Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), 2009.
[] 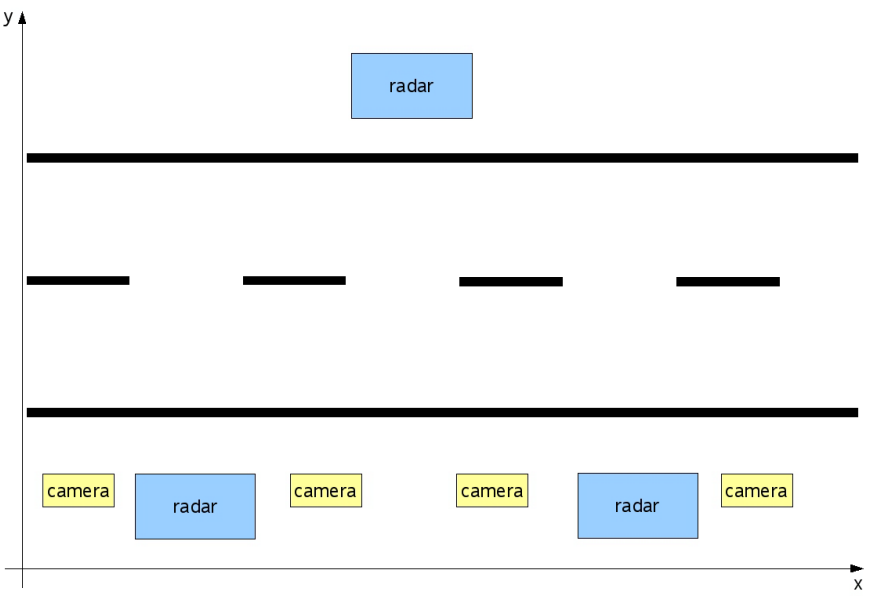
A Framework for Multiple Radar and Multiple 2D/3D Camera Fusion , In 4th IEEE ISIF Workshop on Sensor Data Fusion: Trends, Solutions, Applications (SDF), 2009.
[] Advanced Data Terms for Variational Optic Flow Estimation , In Proceedings Vision, Modeling and Visualization (VMV), 2009.
[] 
Object Identification with Tactile Sensors Using Bag-of-Features , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2009.
[] 
Regression-Based Online Situation Recognition for Vehicular Traffic Scenarios , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2009.
[] 
Learning Kinematic Models for Articulated Objects , In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2009.
[] 
Towards Understanding Articulated Objects , In Proc. of the Workshop on Robot Manipulation at Robotics: Science and Systems Conference (RSS), 2009.
[] 
Learning Kinematics from Direct Self-Observation Using Nearest-Neighbor Methods , In Proc. of the German Workshop on Robotics, 2009.
[] 
Imitation Learning with Generalized Task Descriptions , In International Conference on Robotics and Automation (ICRA), 2009.
[] 
Reconstructing Optical Flow Fields by Motion Inpainting , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), Springer, volume 5681, 2009.
[] 
Video Super Resolution using Duality Based TV-L1 Optical Flow , In Pattern Recognition (Proc. DAGM), 2009.
[] 
Large Displacement Optical Flow Computation without Warping , In IEEE International Conference on Computer Vision (ICCV), 2009.
[] 
Beyond Connecting the Dots: A Polynomial-time Algorithm for Segmentation and Boundary Estimation with Imprecise User Input , In IEEE International Conference on Computer Vision (ICCV), 2009.
[] 
Curvature Regularity for Region-based Image Segmentation and Inpainting: A Linear Programming Relaxation , In IEEE International Conference on Computer Vision (ICCV), 2009.
[] 
Structure- and Motion-adaptive Regularization for High Accuracy Optic Flow , In IEEE International Conference on Computer Vision (ICCV), 2009.
[] 
An Algorithm for Minimizing the Piecewise Smooth Mumford-Shah Functional , In IEEE International Conference on Computer Vision (ICCV), 2009.
[] 
Variational Optical Flow from Alternate Exposure Images , In Proceedings Vision, Modeling and Visualization (VMV), 2009.
[] 
Superresolution Texture Maps for Multiview Reconstruction , In IEEE International Conference on Computer Vision (ICCV), 2009.
[] 
A Superresolution Framework for High-Accuracy Multiview Reconstruction , In Pattern Recognition (Proc. DAGM), 2009.
Received DAGM Best Paper Award [] 
Detection and Segmentation of Independently Moving Objects from Dense Scene Flow , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR) (D. Cremers, Y. Boykov, A. Blake, F. R. Schmidt, eds.), volume 5681, 2009.
[] 
Continuous Ratio Optimization via Convex Relaxation with Applications to Multiview 3D Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2009.
[] 
A Convex Relaxation Approach for Computing Minimal Partitions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2009.
[] 
Efficient Planar Graph Cuts with Applications in Computer Vision , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2009. (Note: This version of the paper is modified with respect to the published one: In the published version we had only cited the PhD thesis [2], as the conference paper [3] does not mention Step 13 of Algorithm 2 that restores the important property of T being a rooted tree.)
Received a CVPR Doctoral Spotlight Award [] 
A Closed-Form Solution for Image Sequence Segmentation with Dynamical Shape Priors , In Pattern Recognition (Proc. DAGM), 2009.
[] 
Non-Parametric Single View Reconstruction of Curved Objects using Convex Optimization , In Pattern Recognition (Proc. DAGM), 2009.
Received a DAGM Paper Award [] 
Fast 3D surface reconstruction by unambiguous compound phase coding , In the 2009 IEEE International Workshop on 3D Digital Imaging and Modeling (3DIM), 2009.
2008
[] Orthogonal wall correction for visual motion estimation , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2008.
[] In-lane Localization in Road Networks using Curbs Detected in Omnidirectional Height Images , In Proceedings of Robotik 2008, 2008.
[] Multimodal People Detection and Tracking in Crowded Scenes , In Proc. of the Twenty-Third Conference on Artificial Intelligence (AAAI), 2008.
[] Multimodal Detection and Tracking of Pedestrians in Urban Environments with Explicit Ground Plane Extraction , In Proc. of the International Conference on Intelligent Robots and Systems (IROS), 2008.
[] Motion Estimation Based on a Temporal Model of Fluid Flows , In 13th International Symposium on Flow Visualization, 2008.
[] 
Body Scheme Learning and Life-Long Adaptation for Robotic Manipulation , In Proc. of the Workshop on Robot Manipulation at the Robotics: Science and Systems Conference (RSS), 2008.
[] 
Adaptive Body Scheme Models for Robust Robotic Manipulation , In Robotics: Science and Systems Conference (RSS), 2008.
[] 
Unsupervised Body Scheme Learning through Self-Perception , In International Conference on Robotics and Automation (ICRA), 2008.
[] 
Postprocessing of Optical Flows via Surface Measures and Motion Inpainting , In Pattern Recognition (Proc. DAGM), Springer, volume 5096, 2008.
[] 
On Errors-In-Variables Regression with Arbitrary Covariance and its Application to Optical Flow Estimation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2008.
[] 
A Statistical Confidence Measure for Optical Flows , In European Conference on Computer Vision (ECCV), 2008.
[] 
Nonlocal texpaperture filtering with efficient tree structures and invariant patch similarity measures , In Int. Workshop on Local and Nonlocal Approximation, 2008.
[] 
Modeling and Tracking Line-Constrained Mechanical Systems , In 2nd Workshop on Robot Vision (G. Sommer, R. Klette, eds.), volume 4931, 2008.
[] 
High Resolution Motion Layer Decomposition using Dual-space Graph Cuts , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2008.
[] 
Globally Optimal Shape-based Tracking in Real-time , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2008.
[] 
Matching Non-rigidly Deformable Shapes Across Images: A Globally Optimal Solution , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2008.
[] 
Markerless Motion Capture of Man-Machine Interaction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2008.
[] 
Shape Priors in Variational Image Segmentation: Convexity, Lipschitz Continuity and Globally Optimal Solutions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2008.
[] 
An Unbiased Second-Order Prior for High-Accuracy Motion Estimation , In Pattern Recognition (Proc. DAGM), Springer, 2008.
[] 
An Improved Algorithm for TV-L1 Optical Flow , In Proc. of the Dagstuhl Motion Workshop, Springer, 2008.
[] 
Fast and Exact Solution of Total Variation Models on the GPU , In CVPR Workshop on Visual Computer Vision on GPU's, 2008.
[] Continuous Globally Optimal Image Segmentation with Local Constraints , In Computer Vision Winter Workshop 2008, 2008.
[] Automatic Differentiation for GPU-Accelerated 2D/3D Registration , In 5th International Conference on Automatic Differentiation, 2008.
[] 
An Experimental Comparison of Discrete and Continuous Shape Optimization Methods , In European Conference on Computer Vision (ECCV), 2008.
[] 
Duality TV-L1 Flow with Fundamental Matrix Prior , In Image Vision and Computing, 2008.
[] 
Efficient Dense Scene Flow from Sparse or Dense Stereo Data , In European Conference on Computer Vision (ECCV), 2008.
[] 
Integration of Multiview Stereo and Silhouettes via Convex Functionals on Convex Domains , In European Conference on Computer Vision (ECCV), 2008.
[] 
Continuous Energy Minimization via Repeated Binary Fusion , In European Conference on Computer Vision (ECCV), 2008.
[] 
A Convex Formulation of Continuous Multi-Label Problems , In European Conference on Computer Vision (ECCV), 2008.
[] 
TVSeg - Interactive Total Variation Based Image Segmentation , In British Machine Vision Conference (BMVC), 2008.
[] 
Image Segmentation with Elastic Shape Priors via Global Geodesics in Product Spaces , In British Machine Vision Conference (BMVC), 2008.
2007
[] Hierarchical reactive control for a team of humanoid soccer robots , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2007.
[] Instance-based AMN Classification for Improved Object Recognition in 2D and 3D Laser Range Data , In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2007.
[] Towards Mapping of Cities , In International Conference on Robotics and Automation (ICRA), 2007.
[] Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps , In Proc. of the 6th International Conference on Field and Service Robotics (FSR), 2007.
[] Recovering the Shape of Objects in 3D Point Clouds with Partial Occlusions , In Proc. of the 6th International Conference on Field and Service Robotics (FSR), 2007.
[] Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps , In Fachgespräche Autonome Mobile Systeme (AMS), 2007.
[] Collective Classification for Labeling of Places and Objects in 2D and 3D Range Data , In Proc. of the 31th Annual Conference of the German Classification Society on Data Analysis, Machine Learning, and Applications, 2007.
[] 
Blood vessel classification into arteries and veins in retinal images , In Proc. of the SPIE Medical Imaging, volume 6512, 2007.
[] 
An Adaptive Confidence Measure for Optical Flows Based on Linear Subspace Projections , In Pattern Recognition (Proc. DAGM), Springer, volume 4713, 2007.
[] 
A probabilistic level set formulation for interactive organ segmentation , In Proc. of the SPIE Medical Imaging, 2007.
[] 
Iterated Nonlocal Means for Texture Restoration , In Proc. International Conference on Scale Space and Variational Methods in Computer Vision (F. Sgallari, A. Murli, N. Paragios, eds.), Springer, volume 4485, 2007.
[] 
On the Statistical Interpretation of the Piecewise Smooth Mumford-Shah Functional , In Proc. International Conference on Scale Space and Variational Methods in Computer Vision (F. Sgallari, A. Murli, N. Paragios, eds.), Springer, volume 4485, 2007.
[] 
Nonlinear Dynamical Shape Priors for Level Set Segmentation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2007.
[] 
Scaled motion dynamics for markerless motion capture , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2007.
[] 
Efficient Shape Matching via Graph Cuts , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), Springer, volume 4679, 2007.
[] 
Online smoothing for markerless motion capture , In Pattern Recognition (Proc. DAGM), Springer, 2007.
[] 
WarpCut - Fast obstacle segmentation in monocular video , In Pattern Recognition (Proc. DAGM), Springer, 2007.
[] 
Monocular Video Serves RADAR-based Emergency Braking , In Intelligent Vehicles, 2007.
[] 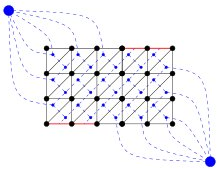
Intrinsic Mean for Semimetrical Shape Retrieval via Graph Cuts , In Pattern Recognition (Proc. DAGM), Springer, volume 4713, 2007.
[] 
Fast Matching of Planar Shapes in Sub-cubic Runtime , In IEEE International Conference on Computer Vision (ICCV), 2007.
[] 
Introducing Curvature into Globally Optimal Image Segmentation: Minimum Ratio Cycles on Product Graphs , In IEEE International Conference on Computer Vision (ICCV), 2007. (After publication, we became aware that a similar graph representation was proposed in a shortest-path context by Amini et al., PAMI 1990.)
[] 
Globally Optimal Image Segmentation with an Elastic Shape Prior , In IEEE International Conference on Computer Vision (ICCV), 2007.
[] 
Nonparametric density estimation with adaptive anisotropic kernels for human motion tracking , In Proc. 2nd International Workshop on Human Motion (A. Elgammal, B. Rosenhahn, R. Klette, eds.), Springer, volume 4814, 2007.
[] 
Continuous Global Optimization in Multiview 3D Reconstruction , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR), Springer, volume 4679, 2007.
[] 
Propagated Photoconsistency and Convexity in Variational Multiview 3D Reconstruction , In Workshop on Photometric Analysis for Computer Vision, 2007.
[] 
GPU-accelerated Affordance Cueing based on Visual Attention , In International Conference on Intelligent Robots and Systems (IROS 2007), 2007.
[] 
A Real-time Visual Attention System Using Integral Images , In 5th International Conference on Computer Vision Systems (ICVS 2007), 2007.
[] Mumford-Shah Meets Stereo: Integration of Weak Depth Hypotheses , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2007.
[] A Globally Optimal Algorithm for Robust TV-L1 Range Image Integration , In IEEE International Conference on Computer Vision (ICCV), 2007.
[] A Duality Based Algorithm for TV-L1-Optical-Flow Image Registration , In 10th International Conference on Medical Image Computing and Computer Assisted Intervention, 2007.
[] A Duality Based Approach for Realtime TV-L1 Optical Flow , In Pattern Recognition (Proc. DAGM), 2007.
[] Real-time Computation of Variational Methods on Graphics Hardware , In Computer Vision Winter Workshop 2007, 2007.
2006
[] See, walk, and kick: Humanoid robots start to play soccer , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2006.
[] Vision-based Interpolation of 3D Laser Scans , In Proc. International Conference on Autonomous Robots and Agents (ICARA), 2006.
[] Robust 3D Scan Point Classification using Associative Markov Networks , In International Conference on Robotics and Automation (ICRA), 2006.
[] Multi-Level Surface Maps for Outdoor Terrain Mapping and Loop Closing , In Proc. of the International Conference on Intelligent Robots and Systems(IROS), 2006.
[] 
Dutch AIBO Team at RoboCup 2006 , In Proceedings CD RoboCup 2006, Bremen, Germany, 2006.
[] 
Robot companion localization at home and in the office , In Proc. of the Belgian-Netherlands Artificial Intelligence Conference (BNAIC), 2006.
[] 
Panoramic Localization in the 4-Legged League , In Proc. of the RoboCup International Symposium (G. Lakemeyer, E. Sklar, D. Sorrenti, T. Takahashi, eds.), Springer, volume 4434, 2006.
[] 
Autonomous Color Learning in an Artificial Environment , In Proc. of the Belgian-Netherlands Artificial Intelligence Conference (BNAIC), 2006.
[] 
Knowledge Based Image Enhancement Using Neural Networks , In International Conference on Pattern Recognition, Proceedings, 2006.
[] 
4D shape priors for level set segmentation of the left myocardium in SPECT sequences , In Medical Image Computing and Computer Assisted Intervention (MICCAI), volume 4190, 2006.
[] 
GPU histogram computation , In ACM SIGGRAPH posters and demos, 2006.
[] 
Nonparametric priors on the space of joint intensity distributions for non-rigid multi-modal image registration , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), volume 2, 2006.
[] 
Statistical priors for combinatorial optimization: efficient solutions via Graph Cuts , In European Conference on Computer Vision (ECCV) (A. Leonardis, H. Bischof, A. Pinz, eds.), Springer, volume 3953, 2006.
[] 
Fully-automated analysis of muscle fiber images with combined region and edge based active contours , In Bildverarbeitung in der Medizin, Springer, 2006.
[] 
High accuracy optical flow serves 3-D pose tracking: exploiting contour and flow based constraints , In European Conference on Computer Vision (ECCV) (A. Leonardis, H. Bischof, A. Pinz, eds.), Springer, volume 3952, 2006.
[] 
Variational motion segmentation with level sets , In European Conference on Computer Vision (ECCV) (A. Leonardis, H. Bischof, A. Pinz, eds.), Springer, volume 3951, 2006.
[] 
A comparison of shape matching methods for contour based pose estimation , In Proc. International Workshop on Combinatorial Image Analysis (R. Reulke, U. Eckhardt, B. Flach, U. Knauer, K. Polthier, eds.), Springer, volume 4040, 2006.
[] 
An integral solution to surface evolution PDEs via Geo-Cuts , In European Conference on Computer Vision (ECCV) (A. Leonardis, H. Bischof, A. Pinz, eds.), Springer, volume 3953, 2006.
[] 
Realtime depth estimation and obstacle detection from monocular video , In Pattern Recognition (Proc. DAGM) (K. Fet al., ed.), Springer, volume 4174, 2006.
[] 
Robust variational segmentation of 3D objects from multiple views , In Pattern Recognition (Proc. DAGM) (K. Fet al., ed.), Springer, volume 4174, 2006.
[] 
Nonparametric density estimation for human pose tracking , In Pattern Recognition (Proc. DAGM) (K. Fet al., ed.), Springer, volume 4174, 2006.
[] 
Near Real-time Motion Segmentation using Graph Cuts , In Pattern Recognition (Proc. DAGM), Springer, volume 4174, 2006.
[] 
Shape Matching by Variational Computation of Geodesics on a Manifold , In Pattern Recognition (Proc. DAGM), Springer, volume 4174, 2006.
[] 
Learning for multi-view 3D tracking in the context of particle filters , In Advances in Visual Computing, Springer, volume 4292, 2006.
[] A Probabilistic Multiphase Model for Variational Image Segmentation , In Pattern Recognition (Proc. DAGM), 2006.
2005
[] Using Hierarchical EM to Extract Planes from 3D Range Scans , In International Conference on Robotics and Automation (ICRA), 2005.
[] Improving Simultaneous Localization and Mapping in 3D Using Global Constraints , In Proc. of the Twentieth National Conference on Artificial Intelligence (AAAI), 2005.
[] Improving Plane Extraction from 3D Data by Fusing Laser Data and Vision , In Proc. of the International Conference on Intelligent Robots and Systems(IROS), 2005.
[] 
Dutch AIBO Team at RoboCup 2005 , In Proceedings CD RoboCup 2005, Osaka, Japan, 2005.
[] 
Reconstructing the Geometry of Flowing Water , In IEEE International Conference on Computer Vision (ICCV), IEEE, 2005.
[] 
Spacetime-Continous Geometry Meshes from Multi-View Video Sequences , In Proceedings of the IEEE International Conference on Image Processing, IEEE Computer Society, 2005.
[] 
PDE based deconvolution with forward-backward diffusivities and diffusion tensors , In Scale Space and PDE Methods in Computer Vision (R. Kimmel, N. Sochen, J. Weickert, eds.), Springer, 2005.
[] 
Efficient kernel density estimation of shape and intensity priors for level set segmentation , In Medical Image Computing and Computer Assisted Intervention (MICCAI), volume 1, 2005.
[] 
A system for marker-less human motion estimation , In Pattern Recognition (Proc. DAGM) (W. Kropatsch, R. Sablatnig, A. Hanbury, eds.), Springer, volume 3663, 2005.
Received the best paper award [] One-shot integral invariant shape priors for variational segmentation , In Energy Minimization Methods in Computer Vision and Pattern Recognition (EMMCVPR) (A. Rangarajan, B. Vemuri, A. L. Yuille, eds.), volume 3757, 2005.
[] 
Dynamical statistical shape priors for level set based tracking , In Intl. Workshop on Variational and Level Set Methods (N. Paragios, F. Faugeras, T. Chan, C. Schnörr, eds.), Springer, volume 3752, 2005. (210–221)
[] 
Three-dimensional shape knowledge for joint image segmentation and pose estimation , In Pattern Recognition (Proc. DAGM) (W. Kropatsch, R. Sablatnig, A. Hanbury, eds.), Springer, volume 3663, 2005.
[] 
Stabilised nonlinear inverse diffusion for approximating hyperbolic PDEs , In Scale Space and PDE Methods in Computer Vision (R. Kimmel, N. Sochen, J. Weickert, eds.), Springer, 2005.
2004
[] First steps towards a robotic system for flexible volumetric mapping of indoor environments , In Proc. of the 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles (IAV), 2004.
[] 
Space-Time Isosurface Evolution for Temporally Coherent 3D Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE Computer Society, volume I, 2004.
[] 
Weighted Minimal Hypersurfaces and Their Applications in Computer Vision , In European Conference on Computer Vision (ECCV), Springer, volume 3022, 2004.
[] 
Spacetime-coherent Geometry Reconstruction from Multiple Video Streams , In 2nd International Symposium on 3D Data Processing, Visualization, and Transmission (3DPVT) (Y. Aloimonos, ed.), IEEE, 2004.
[] 
Shedding light on stereoscopic segmentation , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (L. Davis, ed.), volume 1, 2004.
[] 
Multiphase dynamic labeling for variational recognition-driven image segmentation , In European Conference on Computer Vision (ECCV) (T. Pajdla, V. Hlavac, eds.), Springer, volume 3024, 2004.
[] 
Kernel density estimation and intrinsic alignment for knowledge-driven segmentation: Teaching level sets to walk , In Pattern Recognition (Proc. DAGM) (C. E. Rasmussen, ed.), Springer, volume 3175, 2004.
[] 
Level set based segmentation of multiple objects , In Pattern Recognition (Proc. DAGM) (C.E. Rasmussen, H.H. Bülthoff, M.A. Giese, B. Schölkopf, eds.), Springer, volume 3175, 2004.
[] 
A TV flow based local scale measure for texture discrimination , In European Conference on Computer Vision (ECCV) (T. Pajdla, J. Matas, eds.), Springer, volume 3022, 2004.
[] 
High accuracy optical flow estimation based on a theory for warping , In European Conference on Computer Vision (ECCV) (T. Pajdla, J. Matas, eds.), Springer, volume 3024, 2004.
Received "The Longuet-Higgins Best Paper Award" [] 
Bayesian Approaches to Motion-based Image and Video Segmentation , In 1st Int. Workshop on Complex Motion, Springer, volume 3417, 2004.
2003
[] Map Building with Mobile Robots in Dynamic Environments , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2003.
[] A system for volumetric robotic mapping of underground mines , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2003.
[] 
Hardware-accelerated Autostereogram Rendering for Interactive 3D Visualization , In Stereoscopic Displays and Virtual Reality Systems X, SPIE Proceedings, volume 5006, 2003.
[] 
Real-time, Free-viewpoint Video Rendering from Volumetric Geometry , In Visual Communications and Image Processing (T Ebrahimi, T Sikora, eds.), volume 5150 (2), 2003.
[] 
Real-time Microfacet Billboarding for Free-viewpoint Video Rendering , In Proceedings of the IEEE International Conference on Image Processing, IEEE Computer Society, volume 3, 2003.
[] 
Joint 3D Reconstruction and Background Separation in Multiple Views using Graph Cuts , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE Computer Society, volume I, 2003.
[] Active unsupervised texture segmentation on a diffusion based feature space , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), volume 2, 2003.
[] 
Dynamic texture segmentation , In IEEE International Conference on Computer Vision (ICCV) (B. Triggs, A. Zisserman, eds.), volume 2, 2003.
[] 
A generative model based approach to motion segmentation , In Pattern Recognition (Proc. DAGM) (B. Michaelis, G. Krell, eds.), Springer, volume 2781, 2003.
[] 
Towards Recognition-based Variational Segmentation Using Shape Priors and Dynamic Labeling , In Scale-Space Methods in Computer Vision (L. D. Griffin, M. Lillholm, eds.), Springer, volume 2695, 2003.
[] 
Variational space-time motion segmentation , In IEEE International Conference on Computer Vision (ICCV) (B. Triggs, A. Zisserman, eds.), volume 2, 2003.
[] 
A pseudo-distance for shape priors in level set segmentation , In IEEE 2nd Int. Workshop on Variational, Geometric and Level Set Methods (N. Paragios, ed.), 2003.
[] 
A multiphase level set framework for variational motion segmentation , In Scale-Space Methods in Computer Vision (L. D. Griffin, M. Lillholm, eds.), Springer, volume 2695, 2003.
[] 
A variational framework for image segmentation combining motion estimation and shape regularization , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR) (C. Dyer, P. Perona, eds.), volume 1, 2003.
[] 
Equivalence results for TV diffusion and TV regularisation , In Scale-Space Methods in Computer Vision (L. D. Griffin, M. Lillholm, eds.), Springer, volume 2695, 2003.
[] 
Unsupervised segmentation incorporating colour, texture, and motion , In Computer Analysis of Images and Patterns (N. Petkov, M. A. Westenberg, eds.), Springer, volume 2756, 2003.
2002
[] 
Hardware-accelerated Dynamic Light Field Rendering , In Proceedings Vision, Modeling and Visualization (VMV), 2002.
[] 
Diffusion and regularization of vector- and matrix-valued images , In Inverse Problems, Image Analysis, and Medical Imaging (M. Z. Nashed, O. Scherzer, eds.), AMS, volume 313, 2002.
[] Statistical shape knowledge in variational motion segmentation , In 1st Internat. Workshop on Generative-Model-Based Vision (A. Pece, Y. N. Wu, R. Larsen, eds.), Univ. of Copenhagen, 2002. (http://www.diku.dk/research/published/2002/02-01)
[] 
Motion Competition: variational integration of motion segmentation and shape regularization , In Pattern Recognition (Proc. DAGM) (L. van Gool, ed.), Springer, volume 2449, 2002.
Received the Best Paper Award [] 
Nonlinear shape statistics in Mumford–Shah based segmentation , In European Conference on Computer Vision (ECCV) (A. Heyden, others, eds.), Springer, volume 2351, 2002.
[] Unsupervised Image Partitioning with Semidefinite Programmifng , In Pattern Recognition (L. van Gool, ed.), Springer, volume 2449, 2002.
[] 
Nonlinear matrix diffusion for optic flow estimation , In Pattern Recognition (Proc. DAGM) (L. van Gool, ed.), Springer, volume 2449, 2002.
2001
[] Diffusion Snakes: Combining statistical shape knowledge and image information in a variational framework , In IEEE First Int. Workshop on Variational and Level Set Methods (N. Paragios, ed.), 2001.
Best Student Paper Award [] Convex Relaxations for Binary Image Partitioning and Perceptual Grouping , In Pattern Recognition (B. Radig, S. Florczyk, eds.), Springer, volume 2191, 2001.
Received a DAGM Paper Award [] 
Nonlinear shape statistics via kernel spaces , In Pattern Recognition (Proc. DAGM) (B. Radig, S. Florczyk, eds.), Springer, volume 2191, 2001.
[] 
Multi-stage region merging for image segmentation , In Proc. 22nd Symposium on Information and Communication Theory in the Benelux, 2001.
Received the best paper award
2000
[] Diffusion Snakes using statistical shape knowledge , In Algebraic Frames for the Perception-Action Cycle (G. Sommer, Y.Y. Zeevi, eds.), Springer, volume 1888, 2000.
[] Learning of translation invariant shape knowledge for steering diffusion snakes , In Dynamische Perzeption (G. Baratoff, H. Neumann, eds.), Infix, volume 9, 2000.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
PhD Thesis
2021
[] 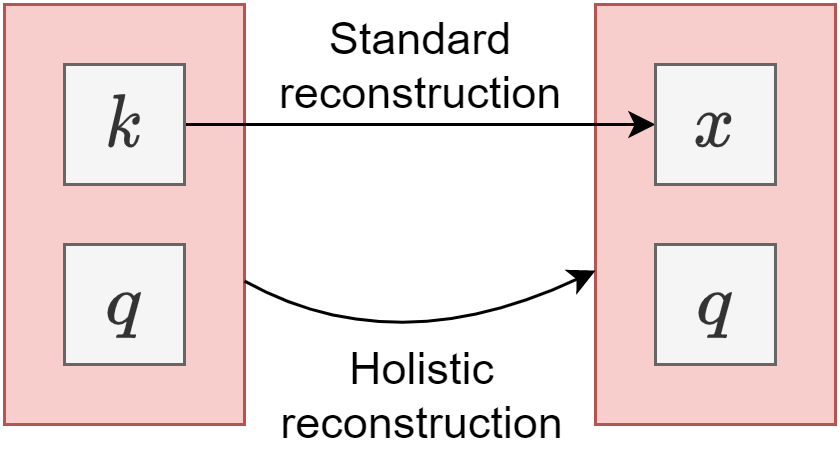
Deep learning and variational analysis for high-dimensional and geometric biomedical data , PhD thesis, Department of Informatics, Technical University of Munich, Germany, 2021.
2020
[] 
High-Quality 3D Reconstruction from Low-Cost RGB-D Sensors , PhD thesis, Technische Universität München, 2020.
2019
[] 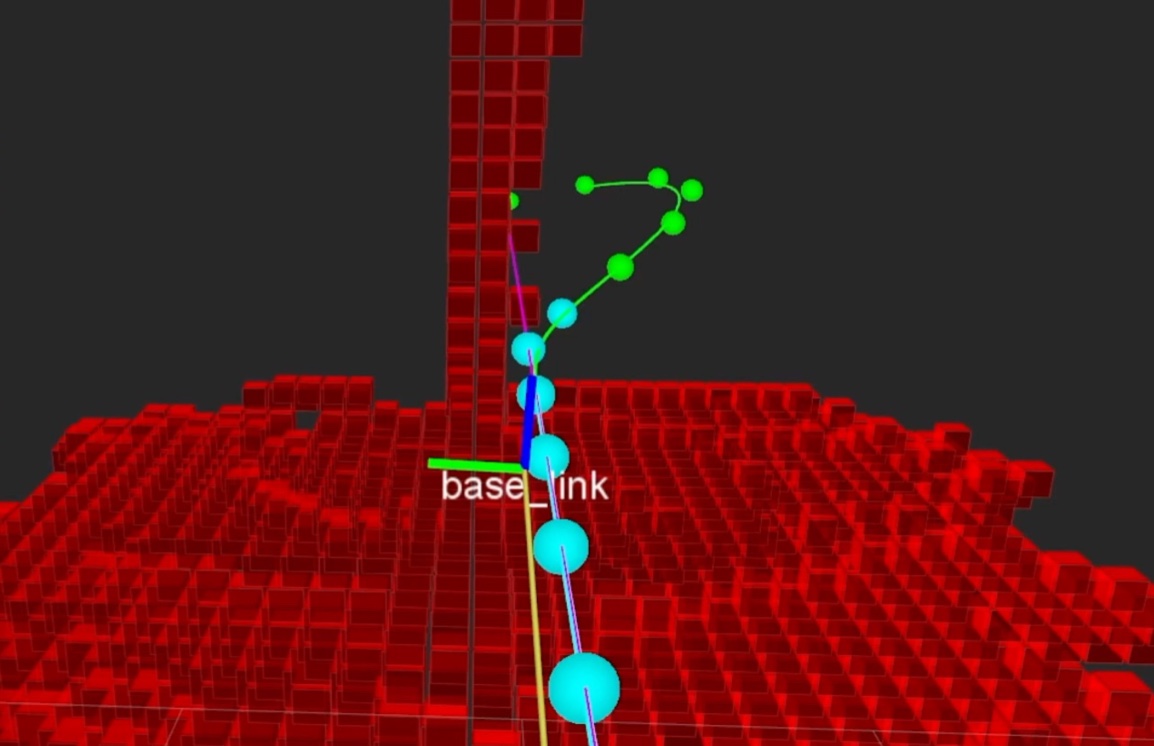
Visual-Inertial Navigation for Autonomous Vehicles , PhD thesis, Technische Universität München, 2019. (library link, keywords=vslam,)
2016
[] A Convex Optimization Framework for Connectivity Constraints in Image Segmentation and 3D Reconstruction , PhD thesis, Technische Universität München, 2016. ([Ph.D. Thesis])
2014
[] Efficient Dense Registration, Segmentation, and Modeling Methods for RGB-D Environment Perception , PhD thesis, Faculty of Mathematics and Natural Sciences, University of Bonn, Germany, 2014.
2012
[] 
Convexity in Image-Based 3D Surface Reconstruction , PhD thesis, Department of Computer Science, Technical University Munich, Germany, 2012.
2011
[] 
Approaches to Probabilistic Model Learning for Mobile Manipulation Robots , PhD thesis, University of Freiburg, 2011.
Received the Artificial Intelligence Dissertation Award 2011 (ECCAI) and the Wolfgang-Genter-Award 2011 (University of Freiburg); Finalist at the Georges-Giralt-Award 2012 (EURON); Selected for the Best Paper Track at IJCAI 2013
2009
[] 
Restoration and Prostprocessing of Optical Flows , PhD thesis, Faculty of Mathematics and Computer Science, Heidelberg University, 2009.
2008
[] 
Combinatorial Solutions for Shape Optimization in Computer Vision , PhD thesis, Department of Computer Science, University of Bonn, Germany, 2008.
2006
[] 
Multi-Camera Reconstruction and Rendering for Free-viewpoint Video , PhD thesis, Max-Planck-Institute for Computer Science, Saarbrücken, 2006.
2005
[] 
From pixels to regions: partial differential equations in image analysis , PhD thesis, Faculty of Mathematics and Computer Science, Saarland University, 2005.
2002
[] 
Statistical shape knowledge in variational image segmentation , PhD thesis, Department of Mathematics and Computer Science, University of Mannheim, Germany, 2002.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Technical Reports
2013
[] 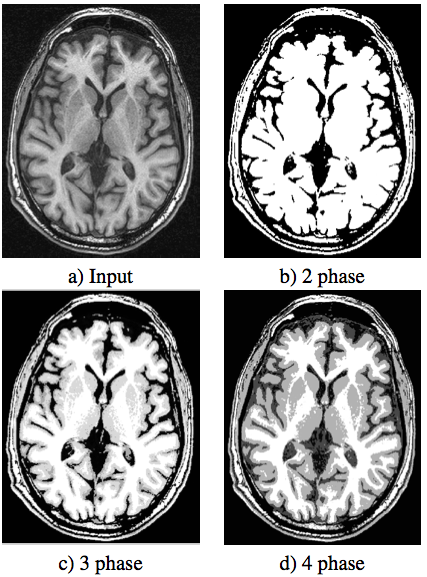
Label Configuration Priors for Continuous Multi-Label Optimization , Technical report, , 2013.
2008
[] 
A Convex Approach for Computing Minimal Partitions , Technical report, Dept. of Computer Science, University of Bonn, 2008.
2007
[] Iterated and Efficient Nonlocal Means for Denoising of Textural Patterns , Technical report, Dept. of Computer Science, University of Bonn, 2007. (Available by e-mail on request.)
2006
[] 
Dutch Aibo Team: Technical Report RoboCup 2006 , Technical report, Dutch Aibo Team, 2006.
2005
[] 
Dutch Aibo Team: Technical Report RoboCup 2005 , Technical report, Dutch Aibo Team, 2005.
[] 
A silhouette based human motion tracking system , Technical report, Centre for Imaging Technology and Robotics, University of Auckland, 2005.
[] 
Colour, texture, and motion in level set based segmentation and tracking , Technical report, Dept. of Mathematics, Saarland University, 2005.
2000
[] Diffusion Snakes using statistical shape knowledge , Technical report, Dept. of Math. and Comp. Sci., Comp. Sci. Series, 2000.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
Other Publications
2023
[] 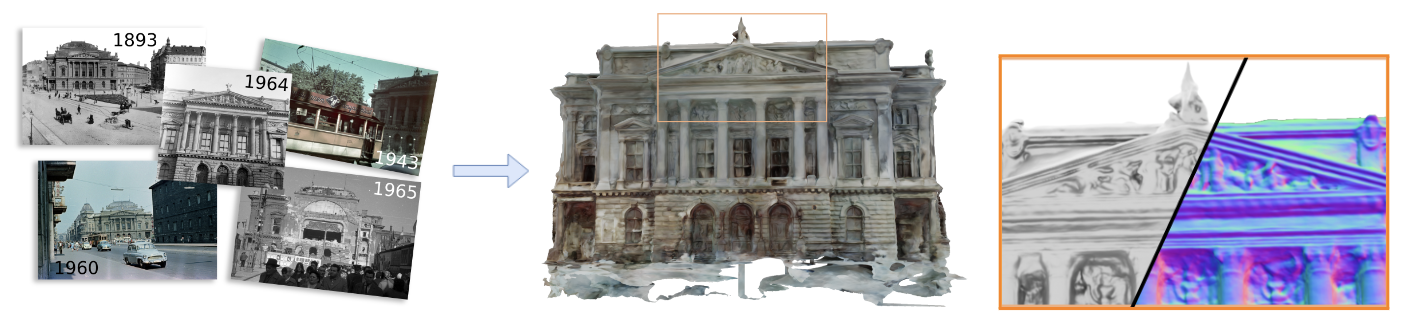
Coloring the Past: Neural Historical Buildings Reconstruction from Archival Photography , [paper], 2023. ([paper])
[] 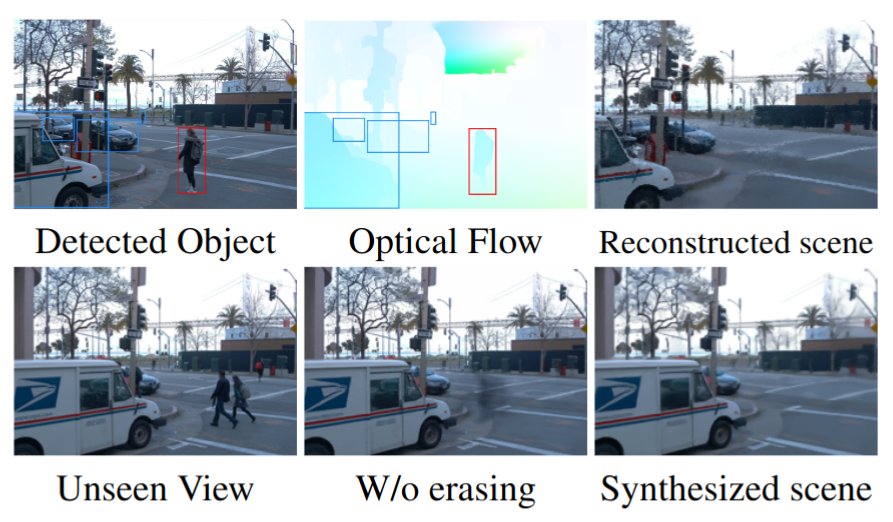
Erasing the Ephemeral: Joint Camera Refinement and Transient Object Removal for Street View Synthesis , [paper], 2023. ([paper])
2015
[] Approaches for Efficient and Autonomous Learning in Robotics and Computer Vision , Habilitation thesis at TU Munich, Dep. of Computer Science, 2015.
2014
[] 
Visual Inertial Control of a Nano-Quadrotor , Master's thesis, Technical University Munich, 2014.
[] 
Monocular Visual Inertial Odometry on a Mobile Device , Master's thesis, Technical University Munich, 2014.
[] 
Semi-dense visual SLAM on mobile devices , Master's thesis, Technical University Munich, 2014.
[] 
Feature Selection and Learning for Semantic Segmentation , Master's thesis, Technical University Munich, 2014.
[] 
Realizing Online (Self-)Collision Avoidance Based on Inequality Constraints with Hierarchical Inverse Kinematics , Master's thesis, Technical University of Munich, 2014.
2013
[] 
Out-of-Core Bundle Adjustment for 3D Workpiece Reconstruction , Master's thesis, Technische Universität München, 2013.
[] 
Lecture Notes: Visual Navigation for Flying Robots , Technische Universität München, Germany, 2013.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2013
2012
[] 
Conference Report - CVPR 2012 , KI - Künstliche Intelligenz, volume 26, 2012.
[] 
Lecture Notes: Visual Navigation for Flying Robots , Technische Universität München, Germany, 2012.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2012 [] 
Odometry from RGB-D Cameras for Autonomous Quadrocopters , Master's thesis, Technical University Munich, 2012.
[] Face recognition with wave kernel signatures using a depth camera , Master's thesis, Technical University of Munich, 2012.
2011
[] 
Conference Report - CVPR 2011 , KI - Künstliche Intelligenz, volume 25, 2011.
[] 
Autonomous Camera-Based Navigation of a Quadrocopter , Master's thesis, Technical University Munich, 2011.
Distinguished with the SIEMENS award for best Master's Thesis 2012
2010
[] Ein Variationsansatz zur Schätzung von dichten Tiefenkarten im Kontext des Structure-from-Motion , Master's thesis, TU Dresden, 2010.
[] 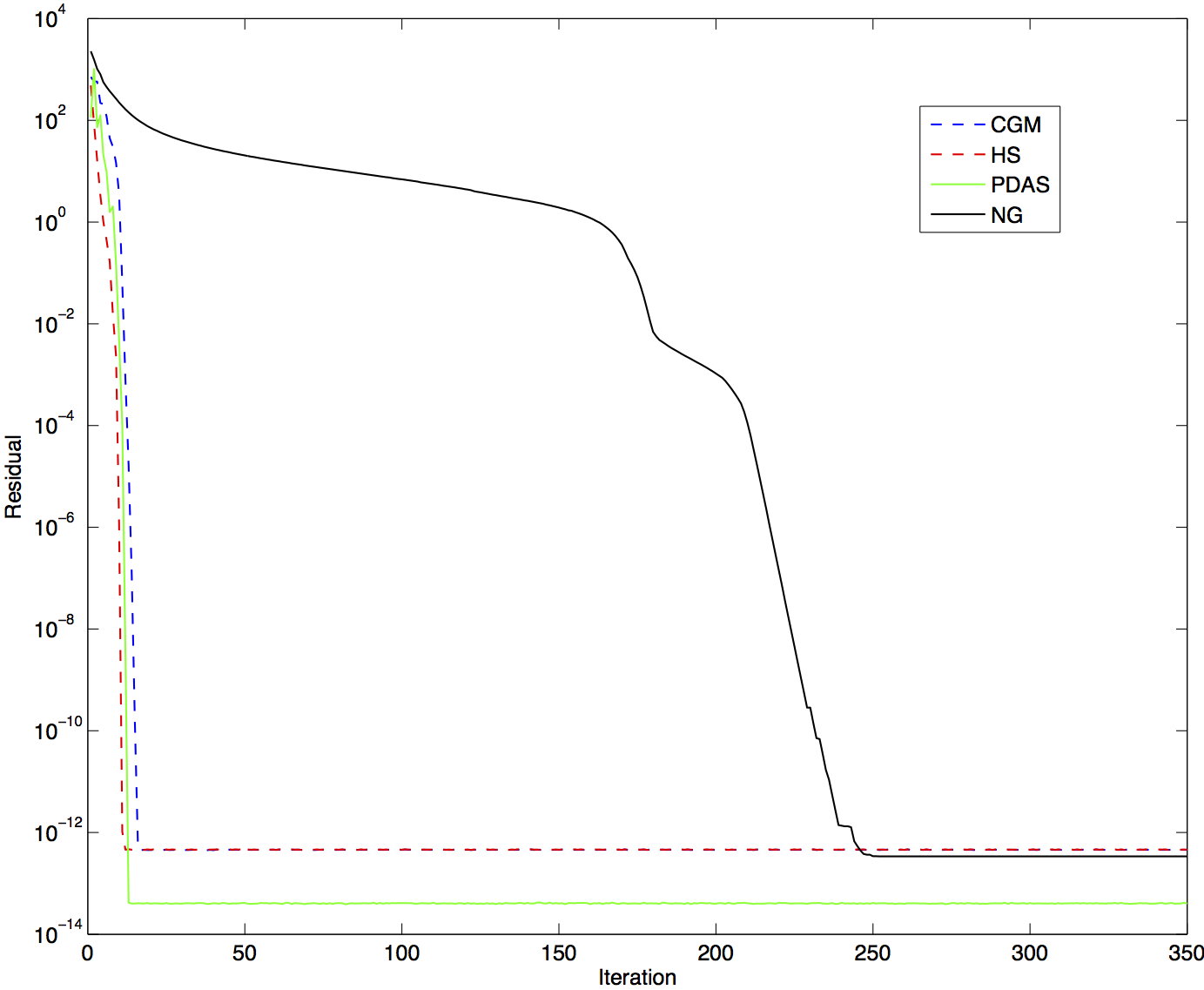
Newton Methods for Total Variation Minimization , Master's thesis, Computer Vision Group, TU Munich, 2010.
2008
[] 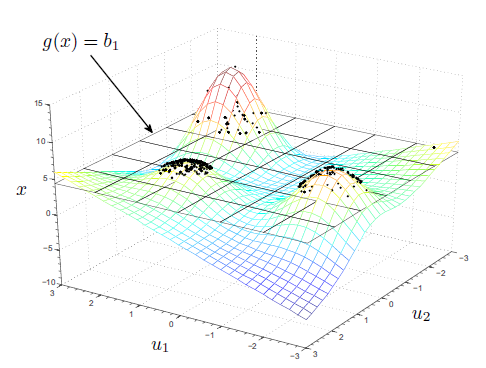
Reliability Estimation Methods and their Efficient Implementation , Master's thesis, Universidad Tecnica Federico Santa Maria, 2008.
[] 
Shape Matching mittels Graph Cuts , Master's thesis, University of Bonn, 2008.
Awarded Best Master Thesis of the Year (Bonn Society for Computer Science)
2007
[] 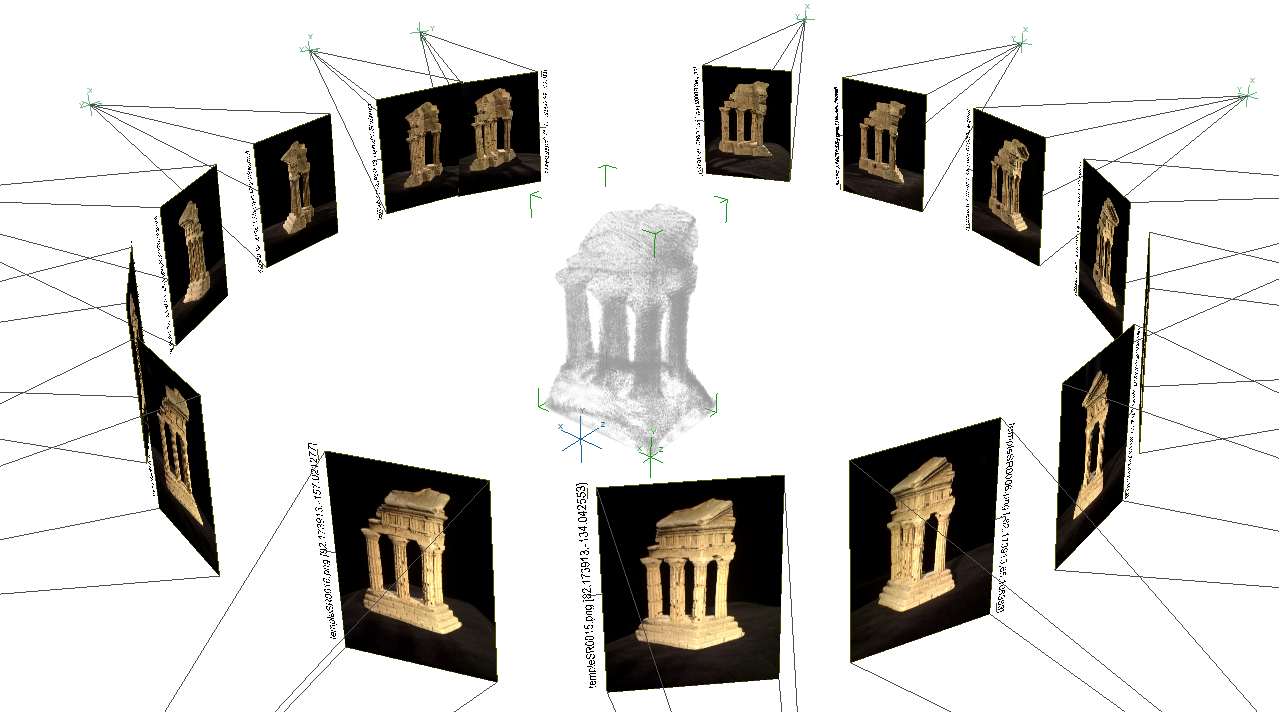
Concurrent Stereo Reconstruction , Master's thesis, Technische Universität Dresden, 2007.
2006
[] 
An appearance-based Visual Compass for Mobile Robots , Master's thesis, University of Amsterdam, 2006.
[] 
Detektion stationaerer Hindernisse in monokularen Bildsequenzen , Master's thesis, Computer Vision Group, University of Bonn, 2006.
2002
[] 
Smoothing of matrix-valued data , Master's thesis, Department of Mathematics and Computer Science, University of Mannheim, 2002.
2001
[] 
Nichtkonforme Finite Elemente und Kollokation für elliptische Randwertprobleme , Master's thesis, Phillips-Universität Marburg, 2001.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
inproceedings
2007
[] 
Region-based Pose Tracking , In Proc. 3rd Iberian Conference on Pattern Recognition and Image Analysis, Springer, 2007.
[] 
Occlusion Modeling by Tracking Multiple Objects , In Pattern Recognition (Proc. DAGM), Springer, 2007.
Books | Book Chapters | Journal Articles | Preprints | Conference and Workshop Papers | PhD Thesis | Technical Reports | Other Publications | inproceedings | article
article
2006
[] 
A system for marker-less motion capture , In Künstliche Intelligenz, 2006.


