LDSO: Direct Sparse Odometry with Loop Closure
Abstract
In this paper we present an extension of Direct Sparse Odometry (DSO) to a monocular visual SLAM system with loop closure detection and pose-graph optimization (LDSO). As a direct technique, DSO can utilize any image pixel with sufficient intensity gradient, which makes it robust even in featureless areas. LDSO retains this robustness, while at the same time ensuring repeatability of some of these points by favoring corner features in the tracking frontend. This repeatability allows to reliably detect loop closure candidates with a conventional feature-based bag-of-words (BoW) approach. Loop closure candidates are verified geometrically and Sim(3) relative pose constraints are estimated by jointly minimizing 2D and 3D geometric error terms. These constraints are fused with a co-visibility graph of relative poses extracted from DSO's sliding window optimization. Our evaluation on publicly available datasets demonstrates that the modified point selection strategy retains the tracking accuracy and robustness, and the integrated pose-graph optimization significantly reduces the accumulated rotation-, translation- and scale-drift, resulting in an overall performance comparable to state-of-the-art feature-based systems, even without global bundle adjustment.
Code
You can find the code for LDSO under a GPL license at https://github.com/tum-vision/LDSO. It is based on DSO.
Citation
If you find our work useful in your research, please consider citing:
@InProceedings{gao2018ldso,
author = "X. Gao and R. Wang and N. Demmel and D. Cremers",
title = "LDSO: Direct Sparse Odometry with Loop Closure",
booktitle = "iros",
year = "2018",
month = "October"
}
Publication
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2021
[] 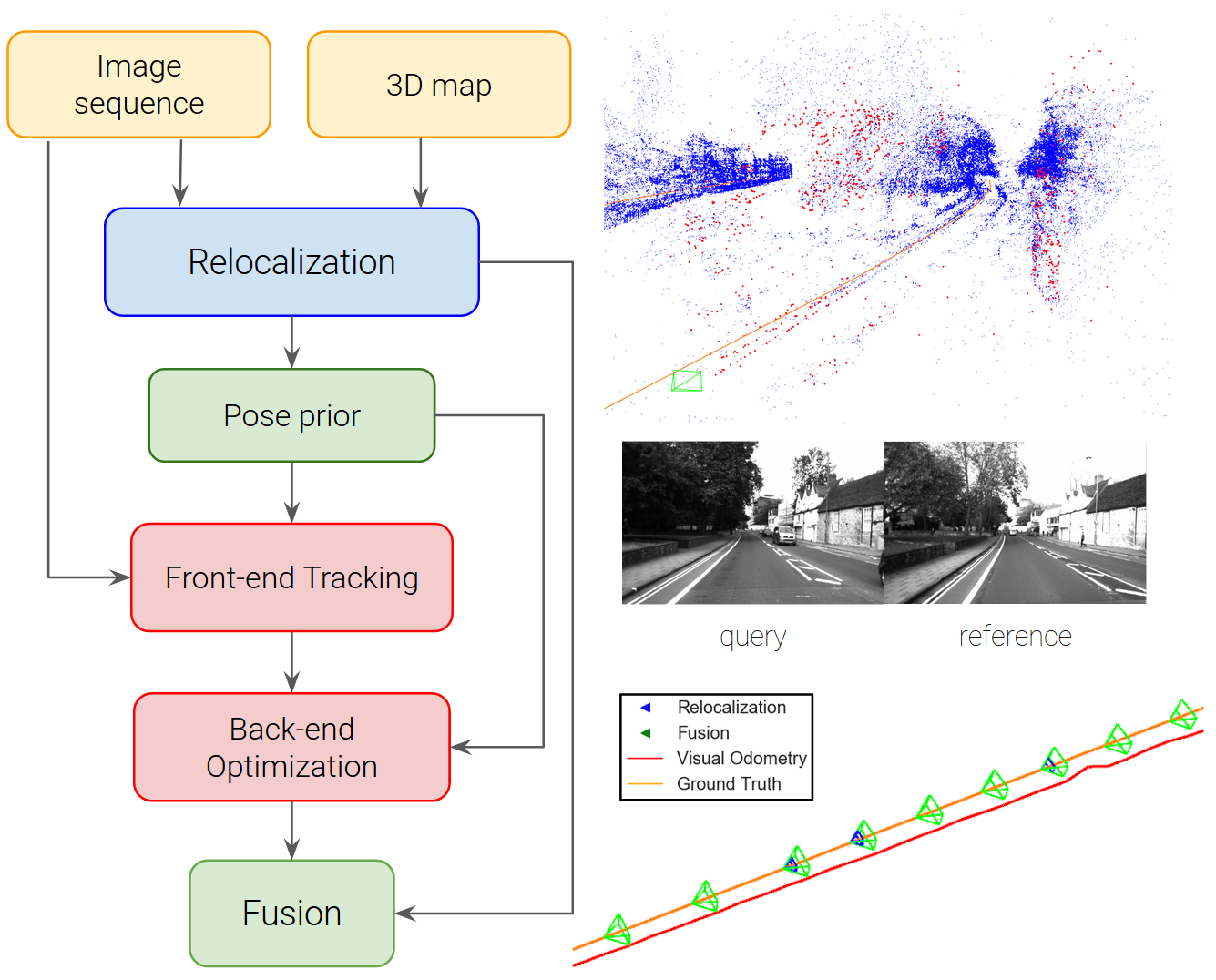
Tight Integration of Feature-based Relocalization in Monocular Direct Visual Odometry , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2021. ([project page])
2018
[] 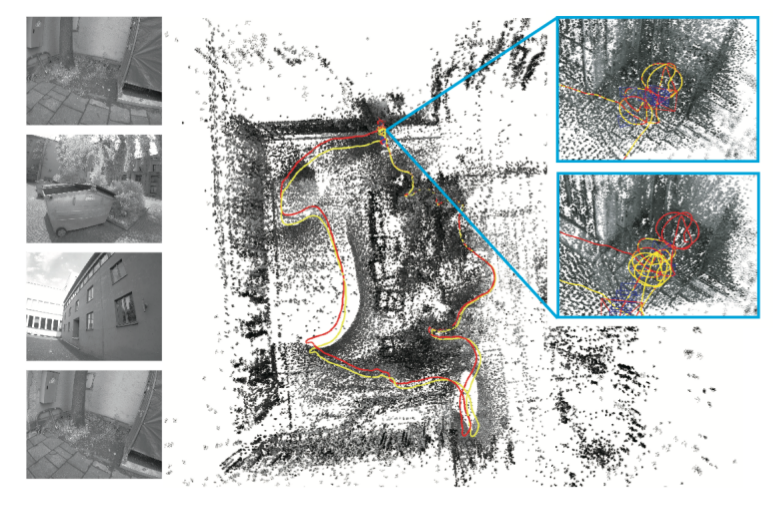
LDSO: Direct Sparse Odometry with Loop Closure , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv][video][code][project])


