Photometry-Based Reconstruction

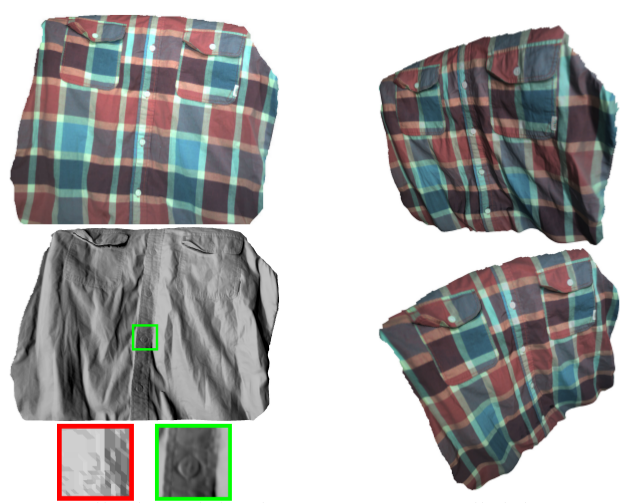
We are concerned with the reconstruction of the 3D world based on the interaction between shape, illumination and material. RGB images provide observations from which we can infer the above, by solving an ill-posed inverse rendering problem. This enables reconstructions with high-frequency geometric information and meaningful albedo estimates, allowing for plausible rendering under novel lighting conditions. We are especially interested in Shape-from-Shading and Photometric Stereo, where the former tries to infer geometry, lighting and appearance from a single image, and the latter attempts to estimate the same desired scene properties from multiple images and different illumination.
Keyword: photometry
Contact





Related publications
Export as PDF, XML, TEX or BIB
2024
Conference and Workshop Papers
[] 
Sparse Views, Near Light: A Practical Paradigm for Uncalibrated Point-light Photometric Stereo , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2024. ([supp])
[] 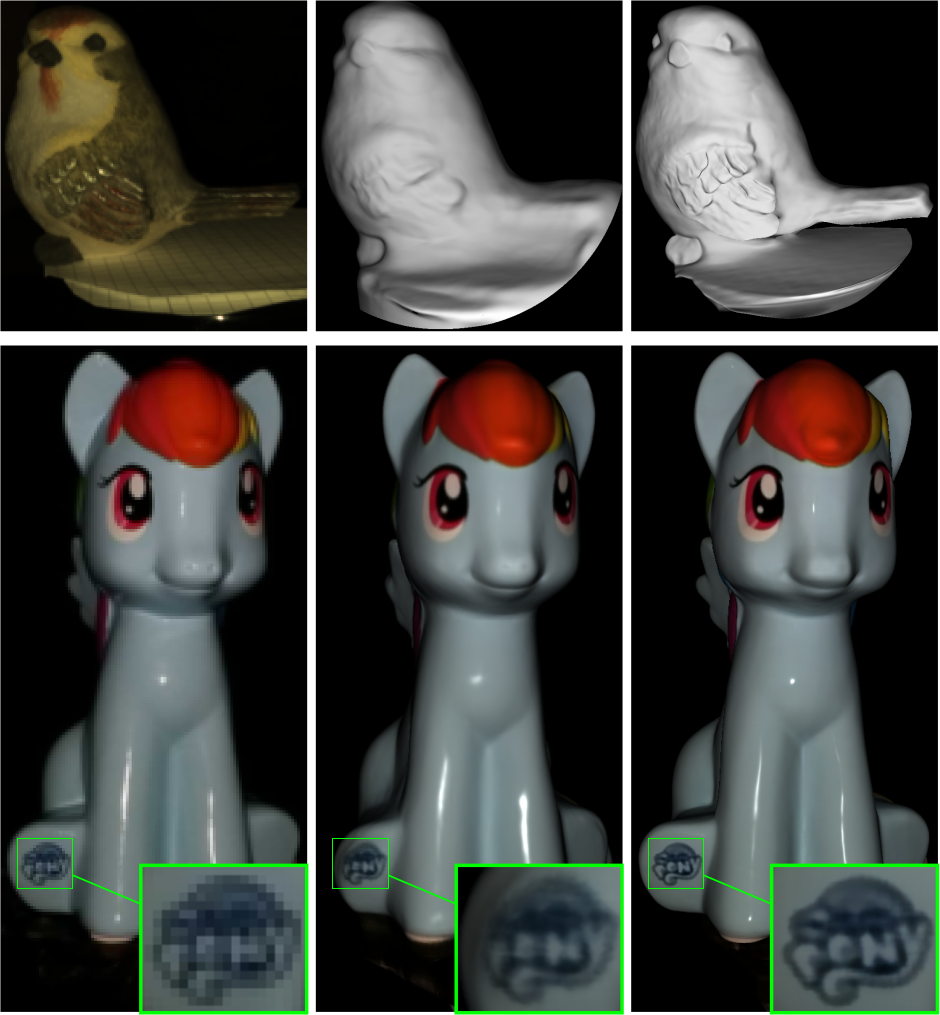
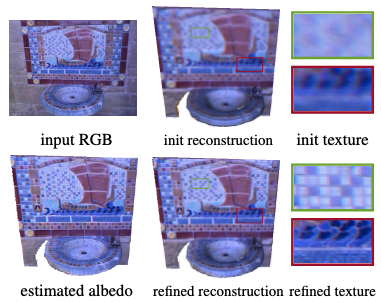
SupeRVol: Super-Resolution Shape and Reflectance Estimation in Inverse Volume Rendering , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2024. ([supp])
2023
Conference and Workshop Papers
[] 
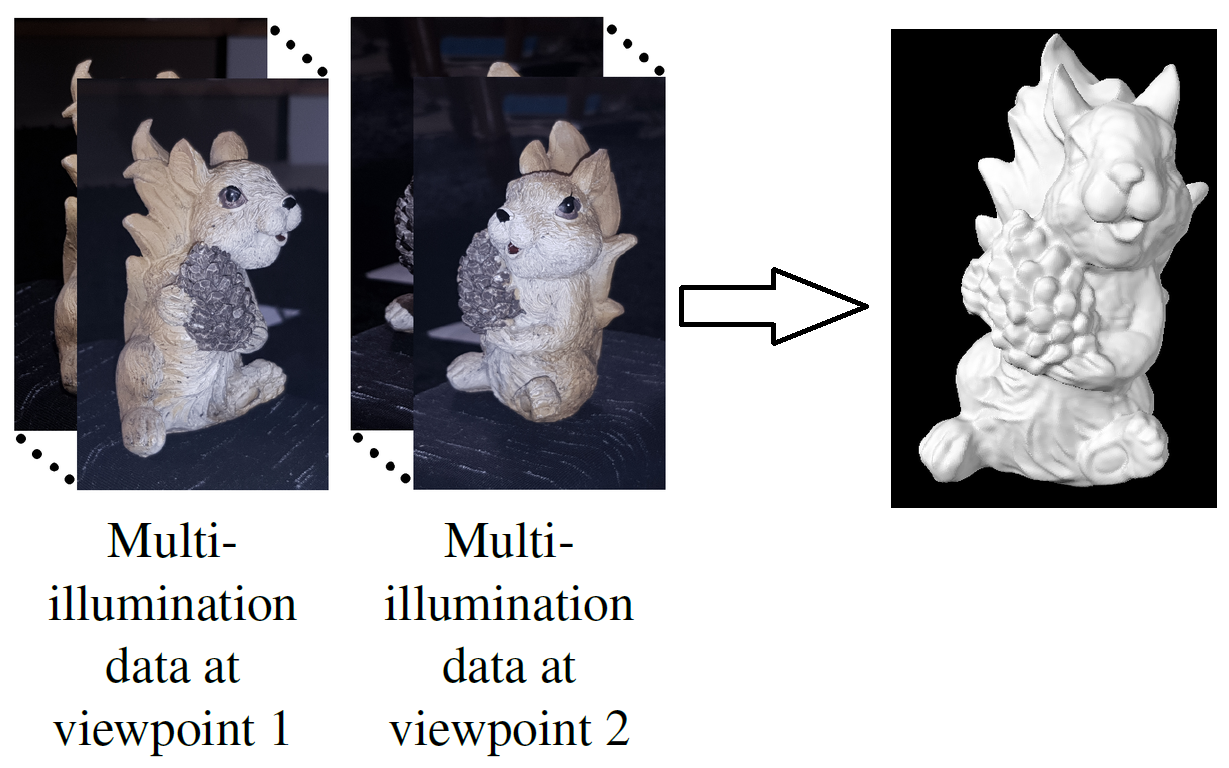
High-Quality RGB-D Reconstruction via Multi-View Uncalibrated Photometric Stereo and Gradient-SDF , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2023. ([code] )
Spotlight Presentation
2021
Conference and Workshop Papers
[] 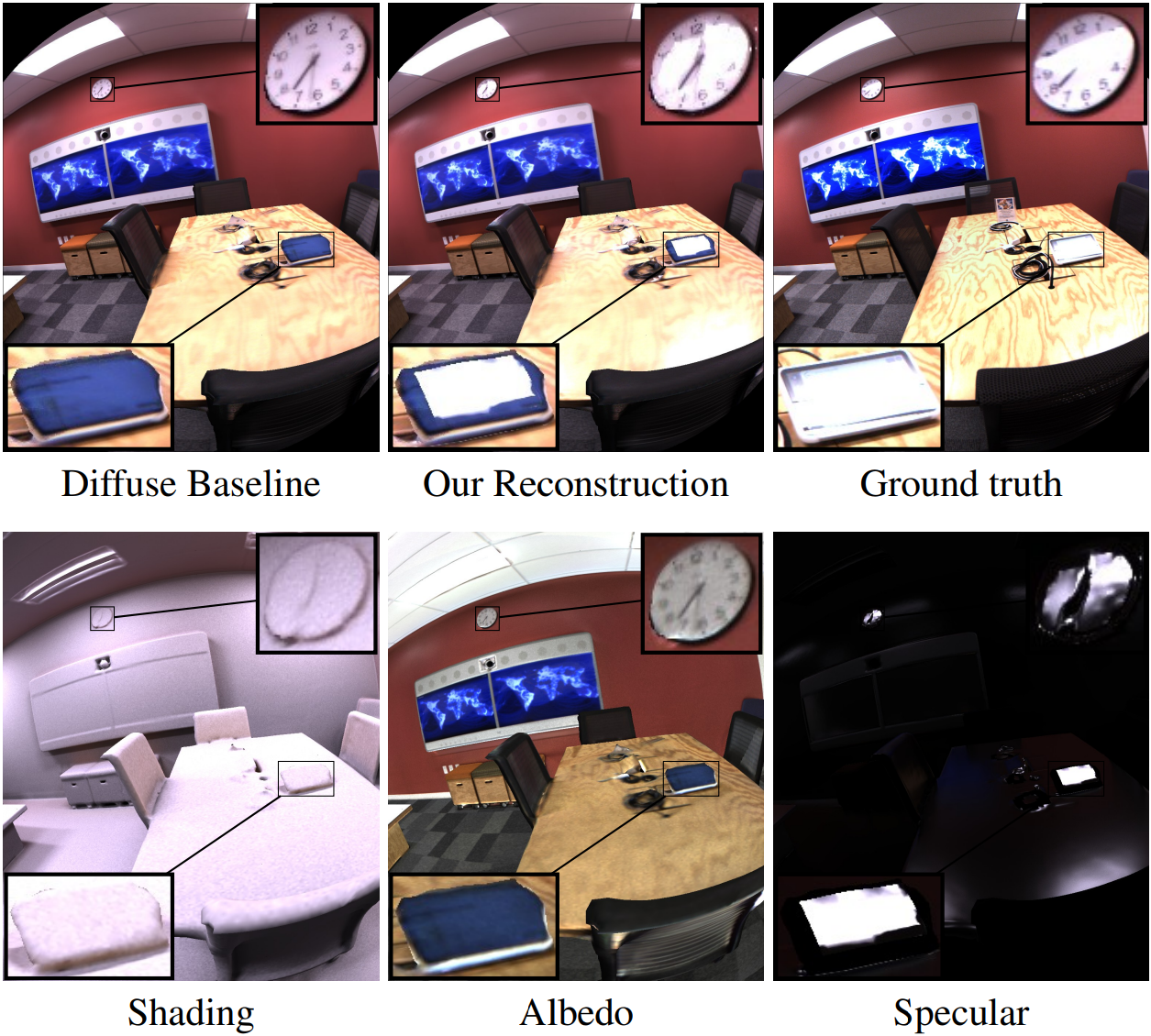
Recovering Real-world Reflectance Properties and Shading from HDR Imagery , In International Conference on 3D Vision (3DV), 2021. ([supp] [slides] [poster] [FB Research] [video])
Spotlight Presentation
2020
Book Chapters
[] 
On the Well-Posedness of Uncalibrated Photometric Stereo Under General Lighting , Chapter in (JD Durou, M Falcone, Y Quéau, S Tozza, eds.), Springer International Publishing, 2020.
Journal Articles
[] 
Photometric Depth Super-Resolution , In IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), volume 42, 2020. ([supp] [project page])
Conference and Workshop Papers
[] 
Inferring Super-Resolution Depth from a Moving Light-Source Enhanced RGB-D Sensor: A Variational Approach , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2020. ([poster] [presentation] [code] [cvf])
Spotlight Presentation
2019
Conference and Workshop Papers
[] 
Variational Uncalibrated Photometric Stereo under General Lighting , In IEEE/CVF International Conference on Computer Vision (ICCV), 2019. ([supp] [poster] [matlab] [python] [cvf])
[] 
Photometric Segmentation: Simultaneous Photometric Stereo and Masking , In International Conference on 3D Vision (3DV), 2019. ([poster] [slides])
Spotlight Presentation
2018
Conference and Workshop Papers
[] 
Fight ill-posedness with ill-posedness: Single-shot variational depth super-resolution from shading , In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2018. ([supp] [poster] [slides] [code] [cvf] [video])
Spotlight Presentation
2017
Conference and Workshop Papers
[] 
Depth Super-Resolution Meets Uncalibrated Photometric Stereo , In IEEE International Conference on Computer Vision Workshops (ICCVW), 2017. ([code][slides] [cvf])
Oral Presentation at ICCV Workshop on Color and Photometry in Computer Vision


