RGB-D Vision

Contact: Mariano Jaimez and Robert Maier
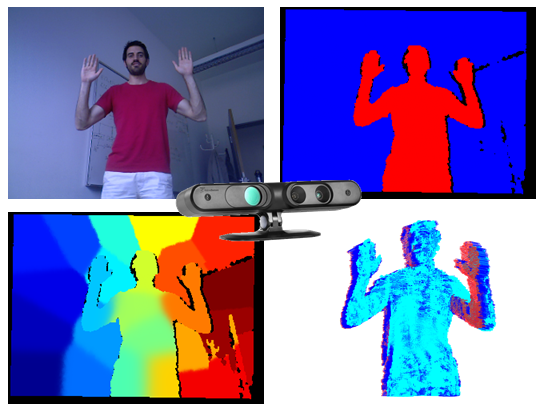
In the past years, novel camera systems like the Microsoft Kinect or the Asus Xtion sensor that provide both color and dense depth images became readily available. There are great expectations that such systems will lead to a boost of new 3D perception-based applications in the fields of robotics and visual&augmented reality.
We are specifically interested in using RGB-D sensors for 3D mapping and localization, path planning, autonomous navigation, object recognition and people tracking.
See also our research on RGB-D SLAM.
Related publications
Export as PDF, XML, TEX or BIB
Journal Articles | Conference and Workshop Papers | Other Publications
Journal Articles
2020
[] 
Photometric Depth Super-Resolution , In IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), volume 42, 2020. ([supp] [project page])
2019
[] 
A Non-invasive 3D Body Scanner and Software Tool towards Analysis of Scoliosis , In BioMed Research International (BMRI), 2019. ([pdf])
2015
[] 
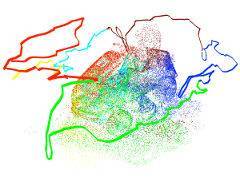
Fast Visual Odometry for 3-D Range Sensors , In IEEE Transactions on Robotics, volume 31, 2015. ([video])
Journal Articles | Conference and Workshop Papers | Other Publications
Conference and Workshop Papers
2023
[] 
High-Quality RGB-D Reconstruction via Multi-View Uncalibrated Photometric Stereo and Gradient-SDF , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2023. ([code] )
Spotlight Presentation
2020
[] 
Inferring Super-Resolution Depth from a Moving Light-Source Enhanced RGB-D Sensor: A Variational Approach , In IEEE Winter Conference on Applications of Computer Vision (WACV), 2020. ([poster] [presentation] [code] [cvf])
Spotlight Presentation
2019
[] 
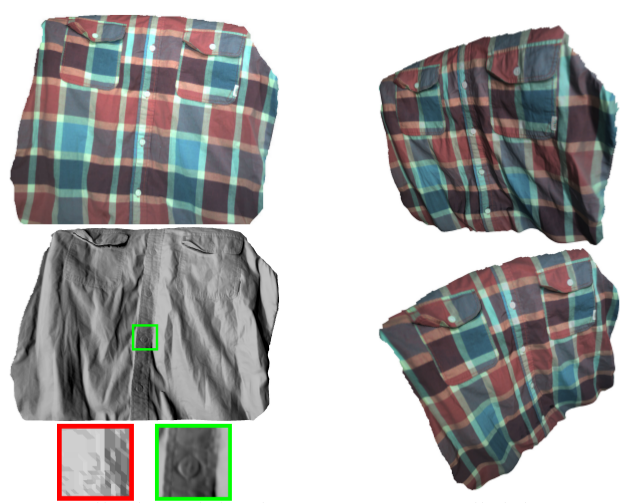
Combining Depth Fusion and Photometric Stereo for Fine-Detailed 3D Models , In Scandinavian Conference on Image Analysis (SCIA), 2019. ([slides] [poster])
Oral Presentation, received the SCIA 2019 Honourable Mention award
2018
[] 
Fight ill-posedness with ill-posedness: Single-shot variational depth super-resolution from shading , In IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2018. ([supp] [poster] [slides] [code] [cvf] [video])
Spotlight Presentation
2017
[] 
Depth Super-Resolution Meets Uncalibrated Photometric Stereo , In IEEE International Conference on Computer Vision Workshops (ICCVW), 2017. ([code][slides] [cvf])
Oral Presentation at ICCV Workshop on Color and Photometry in Computer Vision [] 
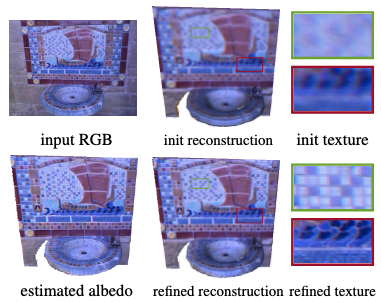
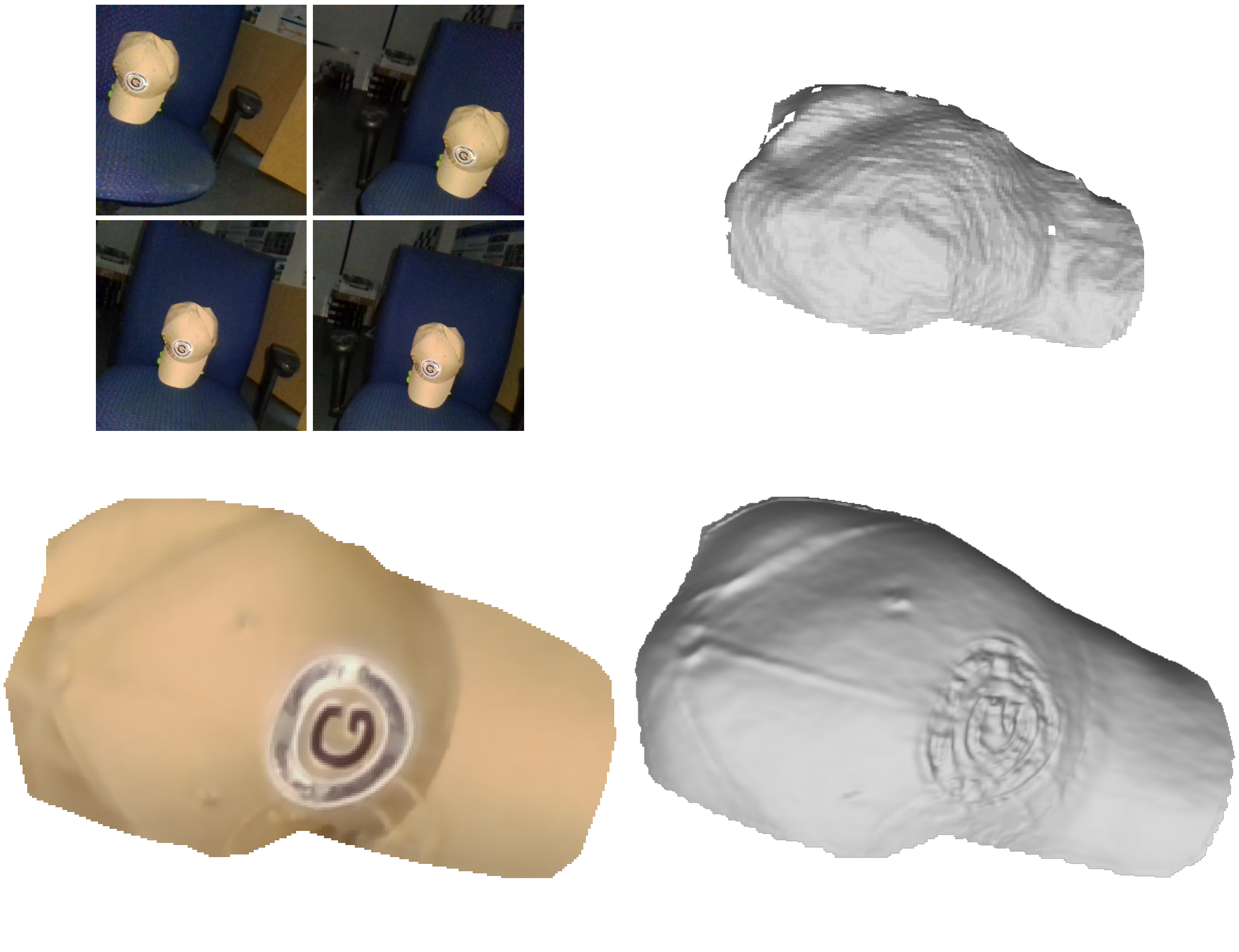
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting , In International Conference on Computer Vision (ICCV), 2017. ([slides] [poster] [dataset] [code])
[] 
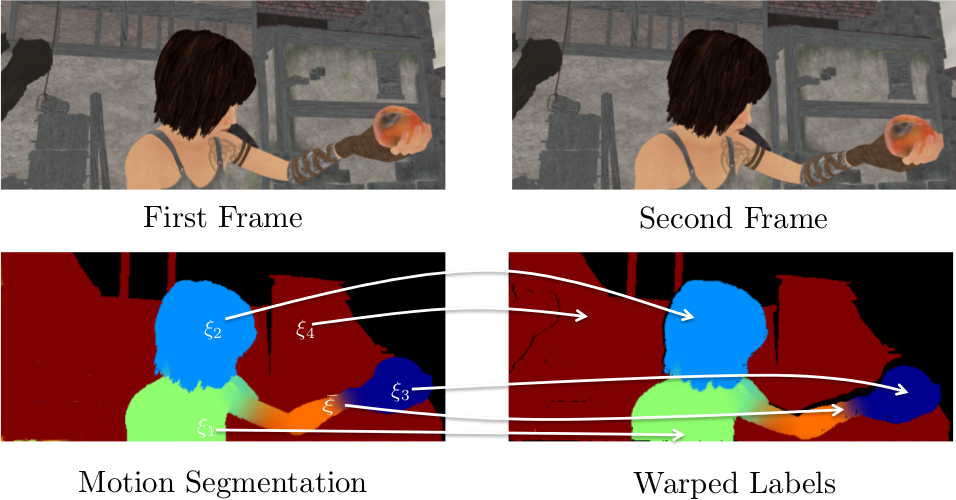
Multiframe Scene Flow with Piecewise Rigid Motion , In International Conference on 3D Vision (3DV), 2017. ([slides] [poster] [supplementary])
Spotlight Presentation [] 
Efficient Online Surface Correction for Real-time Large-Scale 3D Reconstruction , In British Machine Vision Conference (BMVC), 2017. ([poster] [supplementary])
[] 
De-noising, Stabilizing and Completing 3D Reconstructions On-the-go using Plane Priors , In International Conference on Robotics and Automation (ICRA), 2017. ([video])
[] 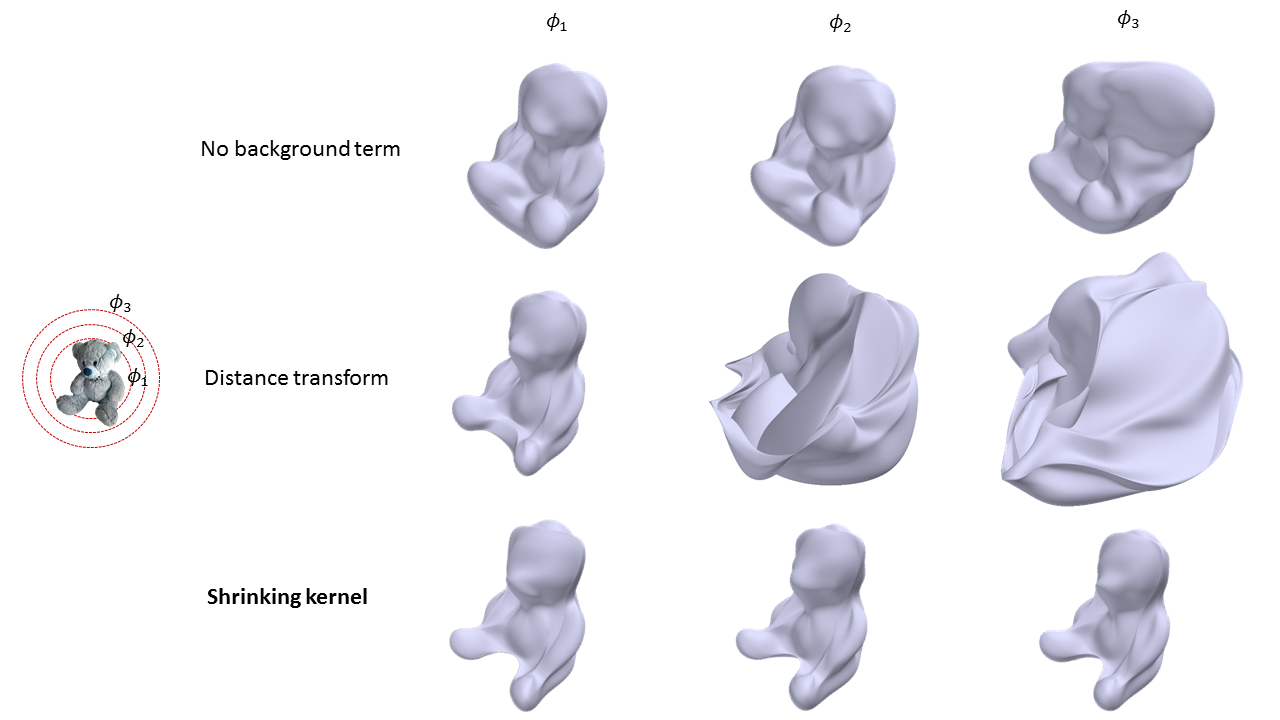
An Efficient Background Term for 3D Reconstruction and Tracking with Smooth Subdivision Surface Models , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. ([video])
[] 
Fast Odometry and Scene Flow from RGB-D Cameras based on Geometric Clustering , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2017. ([video])
2016
[] 
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 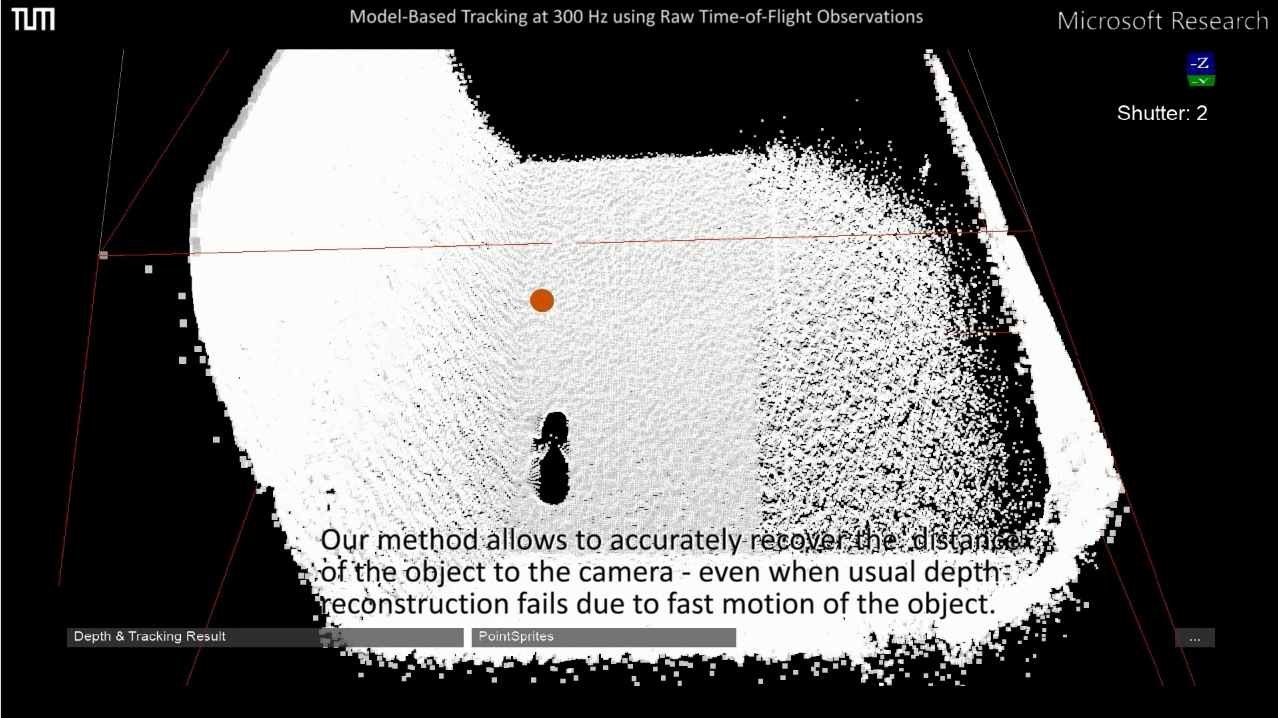
Model-Based Tracking at 300Hz using Raw Time-of-Flight Observations , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video])
[] 
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video][supplementary][datasets])
[] 
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images , In Proc. of the Int. Conference on 3D Vision (3DV), 2015. ([video])
[] 
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures , In International Conference on 3D Vision (3DV), 2015. ([slides] [poster])
[] 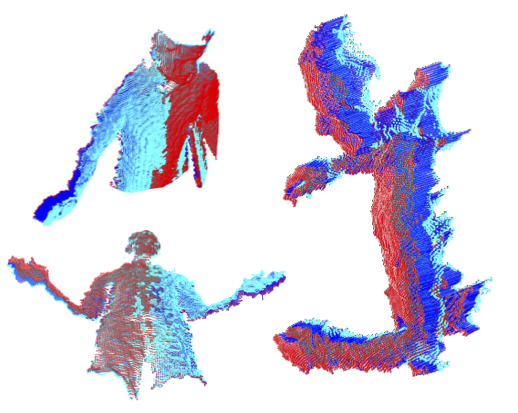
A Primal-Dual Framework for Real-Time Dense RGB-D Scene Flow , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2015. ([video])
2014
[] 
Towards Illumination-invariant 3D Reconstruction using ToF RGB-D Cameras , In International Conference on 3D Vision (3DV), 2014. ([supplementary])
[] 
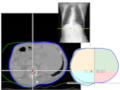
Submap-based Bundle Adjustment for 3D Reconstruction from RGB-D Data , In German Conference on Pattern Recognition (GCPR), 2014. ([slides])
Oral Presentation [] 
Semi-Dense Visual Odometry for AR on a Smartphone , In International Symposium on Mixed and Augmented Reality, 2014.
Best Short Paper Award [] 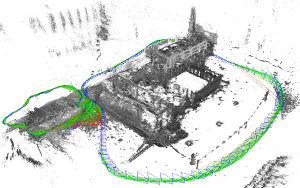
LSD-SLAM: Large-Scale Direct Monocular SLAM , In European Conference on Computer Vision (ECCV), 2014.
Oral Presentation [] 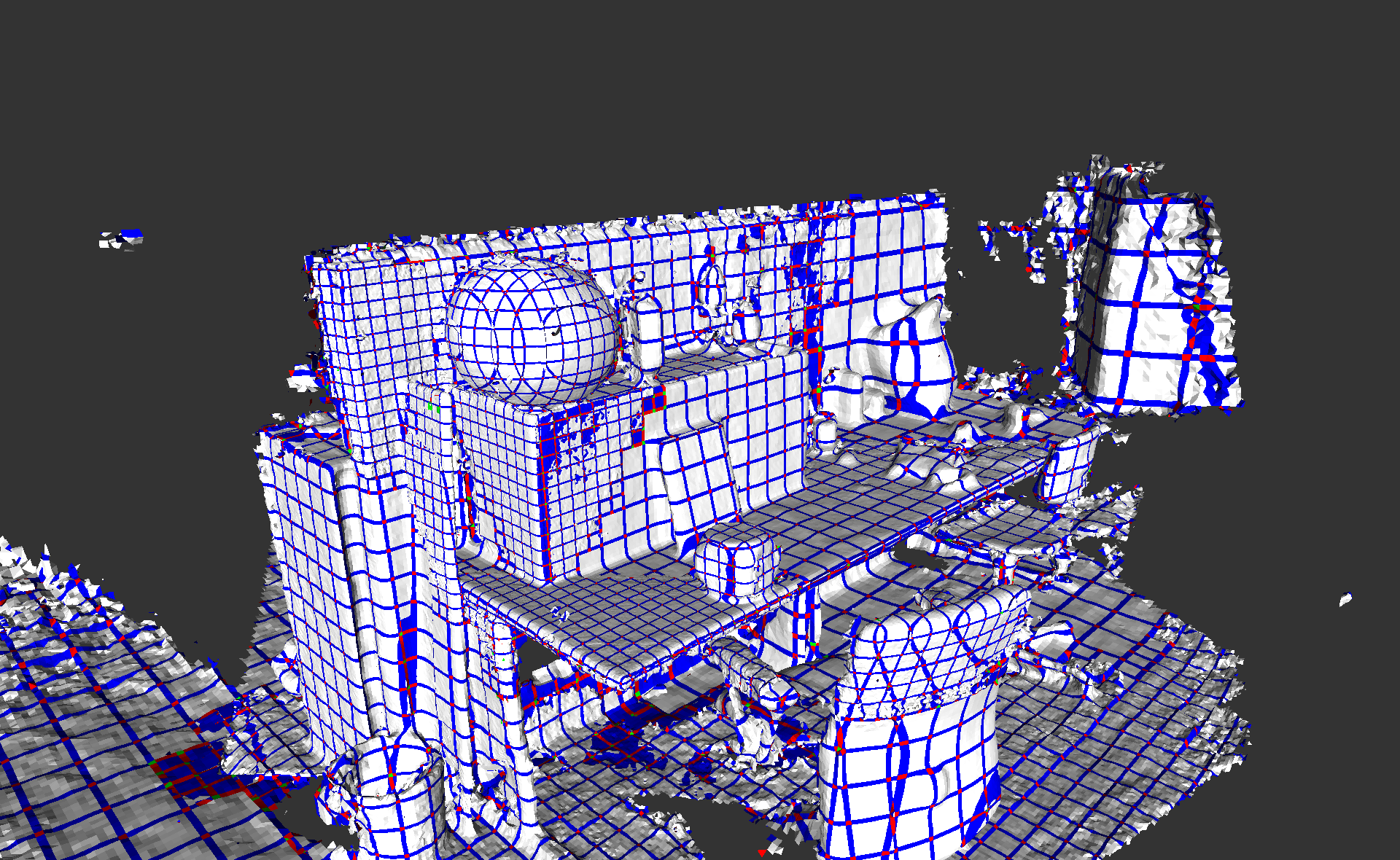
Volumetric 3D Mapping in Real-Time on a CPU , In International Conference on Robotics and Automation (ICRA), 2014.
2013
[] 
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 
Semi-Dense Visual Odometry for a Monocular Camera , In IEEE International Conference on Computer Vision (ICCV), 2013.
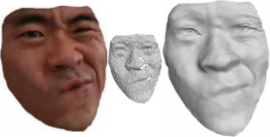
[] CopyMe3D: Scanning and Printing Persons in 3D , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
Dense Tracking and Mapping with a Quadrocopter , In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
[] 
Scale-Aware Object Tracking with Convex Shape Constraints on RGB-D Images , In German Conference on Pattern Recognition (GCPR), 2013.
[] 
FollowMe: Person Following and Gesture Recognition with a Quadrocopter , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Dense Visual SLAM for RGB-D Cameras , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Direct Camera Pose Tracking and Mapping With Signed Distance Functions , In Demo Track of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2013.
[] 
Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions , In Robotics: Science and Systems Conference (RSS), 2013.
[] 
Robust Odometry Estimation for RGB-D Cameras , In International Conference on Robotics and Automation (ICRA), 2013.
Best Vision Paper Award - Finalist
2012
[] 
Evaluating Egomotion and Structure-from-Motion Approaches Using the TUM RGB-D Benchmark , In Proc. of the Workshop on Color-Depth Camera Fusion in Robotics at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
A Benchmark for the Evaluation of RGB-D SLAM Systems , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Real-Time Human Motion Tracking using Multiple Depth Cameras , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
An Evaluation of the RGB-D SLAM System , In International Conference on Robotics and Automation (ICRA), 2012.
2011
[] 
Real-Time Visual Odometry from Dense RGB-D Images , In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
[] 
Towards a benchmark for RGB-D SLAM evaluation , In Proc. of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at Robotics: Science and Systems Conf. (RSS), 2011.
[] 
Real-time 3D visual SLAM with a hand-held camera , In Proc. of the RGB-D Workshop on 3D Perception in Robotics at the European Robotics Forum, 2011.
2010
[] 
Parallel Generalized Thresholding Scheme for Live Dense Geometry from a Handheld Camera , In ECCV Workshop on Computer Vision on GPUs (CVGPU), 2010.
[] 
Real-Time Dense Geometry from a Handheld Camera , In Pattern Recognition (Proc. DAGM), 2010.
Journal Articles | Conference and Workshop Papers | Other Publications
Other Publications
2013
[] 
Out-of-Core Bundle Adjustment for 3D Workpiece Reconstruction , Master's thesis, Technische Universität München, 2013.
2012
[] 
Odometry from RGB-D Cameras for Autonomous Quadrocopters , Master's thesis, Technical University Munich, 2012.


