
Nikolaus Demmel
AlumniTechnical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Office:
Mail: demmeln@in.tum.de
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2020
[] 
Visual-Inertial Mapping with Non-Linear Factor Recovery , In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robotics and Automation (ICRA), IEEE, volume 5, 2020. ([arxiv])
Conference and Workshop Papers
2023
[] 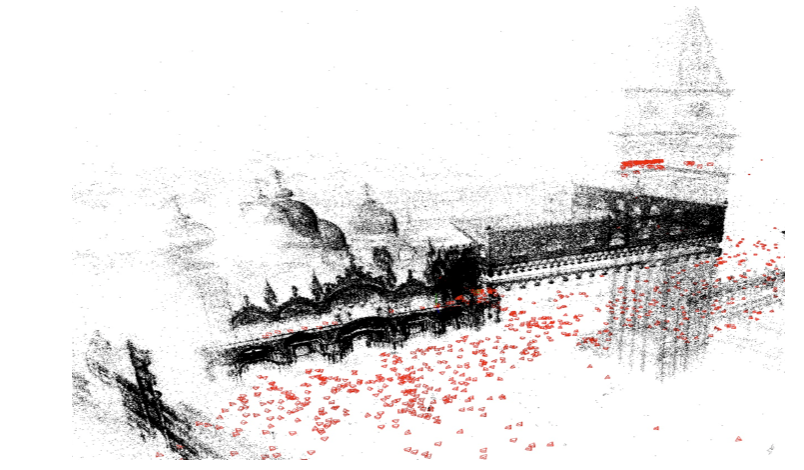
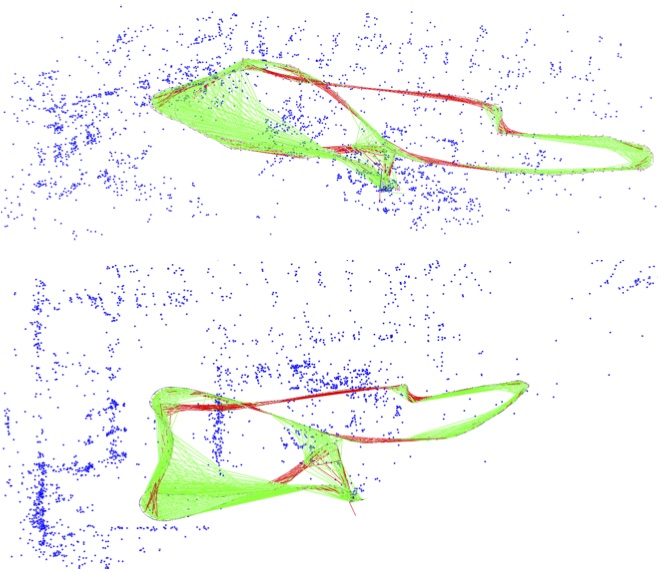
Power Bundle Adjustment for Large-Scale 3D Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023. ([project page][video])
2022
[] ![]()
DirectTracker: 3D Multi-Object Tracking Using Direct Image Alignment and Photometric Bundle Adjustment , In International Conference on Intelligent Robots and Systems (IROS), 2022. ([project page])
[] 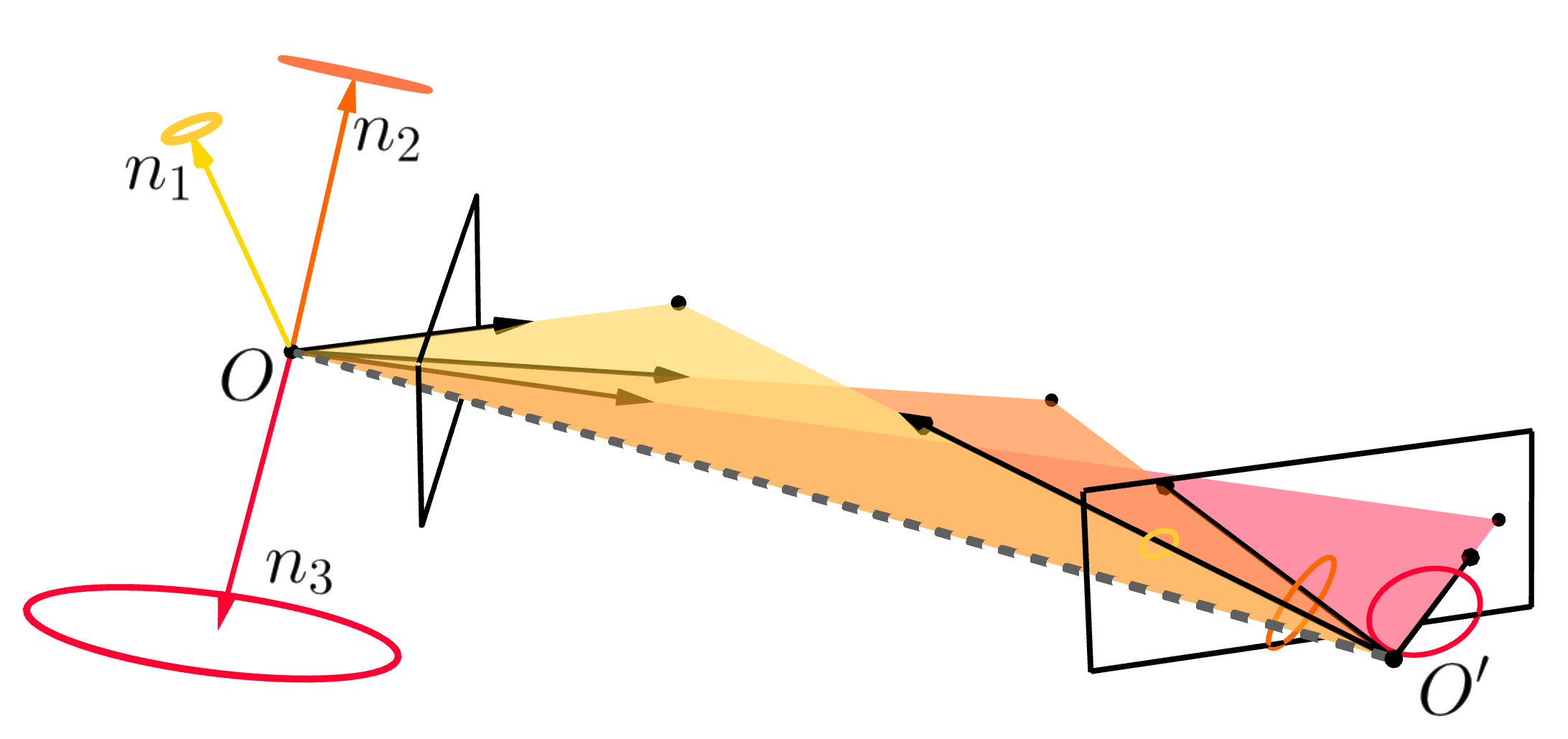
The Probabilistic Normal Epipolar Constraint for Frame-To-Frame Rotation Optimization under Uncertain Feature Positions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([project page])
2021
[] 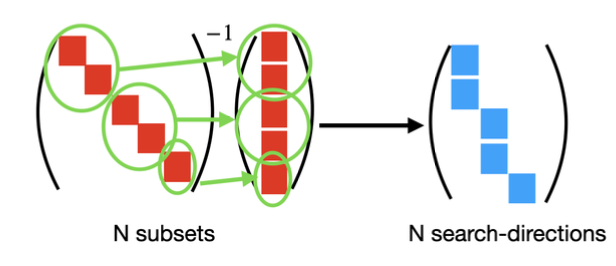
Multidirectional Conjugate Gradients for Scalable Bundle Adjustment , In German Conference on Pattern Recognition (GCPR), 2021. ([presentation])
Oral Presentation [] 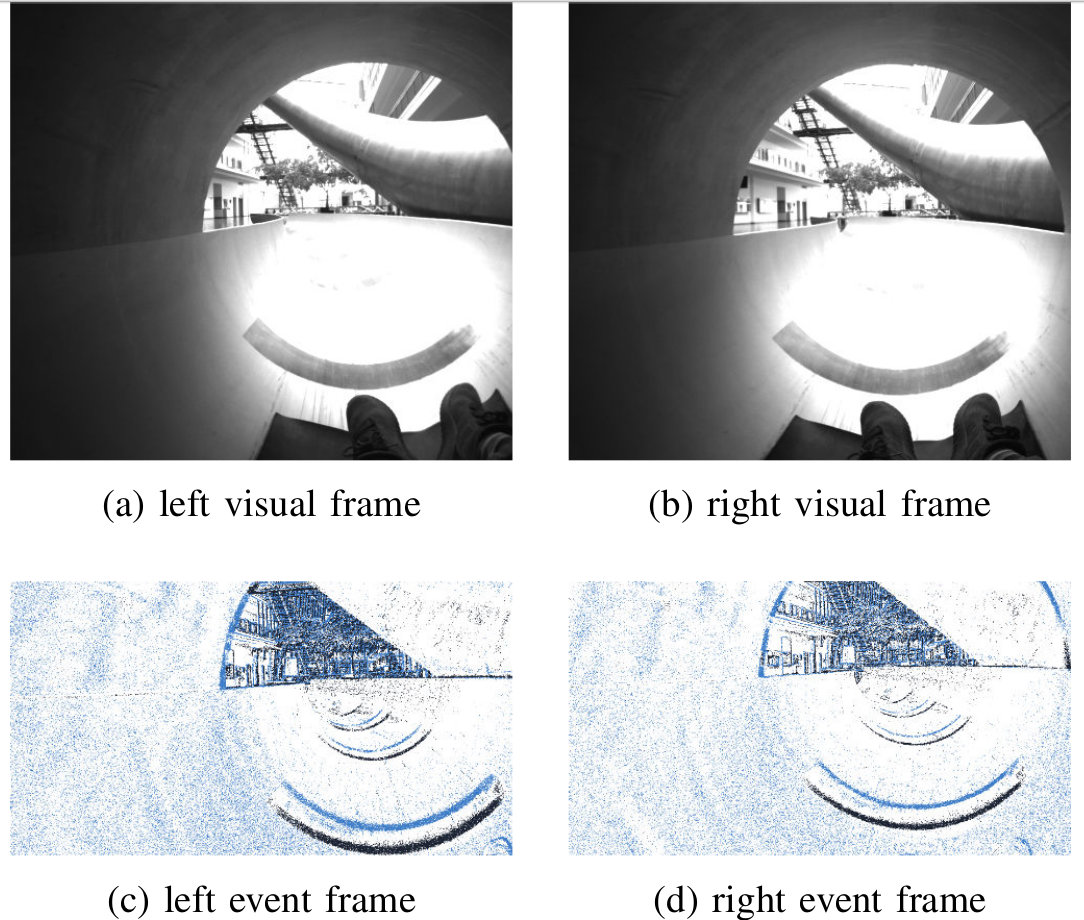
TUM-VIE: The TUM Stereo Visual-Inertial Event Dataset , In International Conference on Intelligent Robots and Systems (IROS), 2021. ([project page])
[] 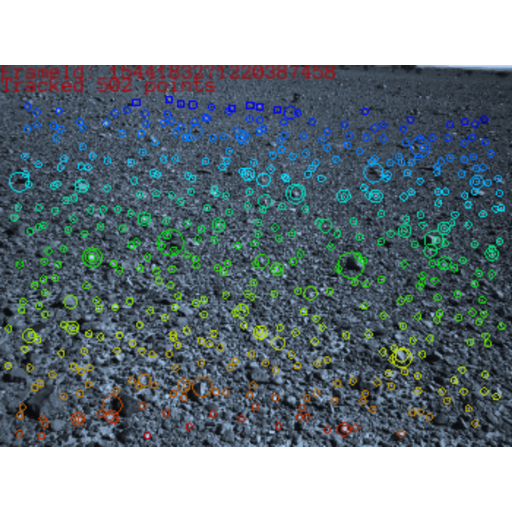
Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions , In International Conference on Intelligent Robots and Systems (IROS), 2021. ([code][video])
[] 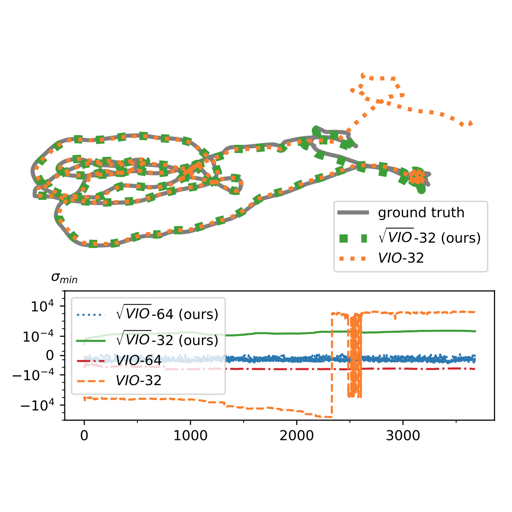
Square Root Marginalization for Sliding-Window Bundle Adjustment , In IEEE International Conference on Computer Vision (ICCV), 2021. ([project page])
[] 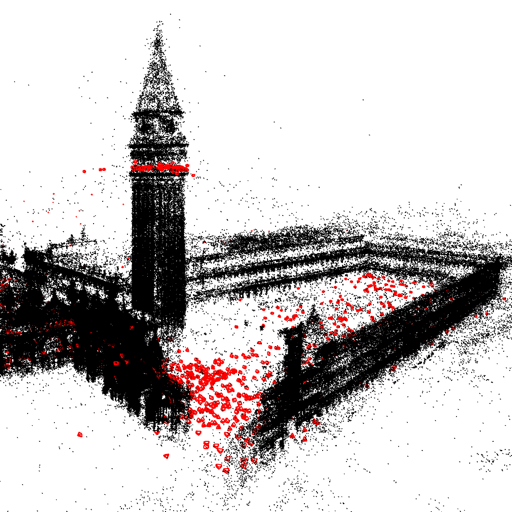
Square Root Bundle Adjustment for Large-Scale Reconstruction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
2020
[] 
Distributed Photometric Bundle Adjustment , In International Conference on 3D Vision (3DV), 2020. ([project page][code])
Oral Presentation [] 
Efficient Derivative Computation for Cumulative B-Splines on Lie Groups , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2019
[] 
Rolling-Shutter Modelling for Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2019. ([arxiv])
2018
[] 
The Double Sphere Camera Model , In Proc. of the Int. Conference on 3D Vision (3DV), 2018. ([arxiv])
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 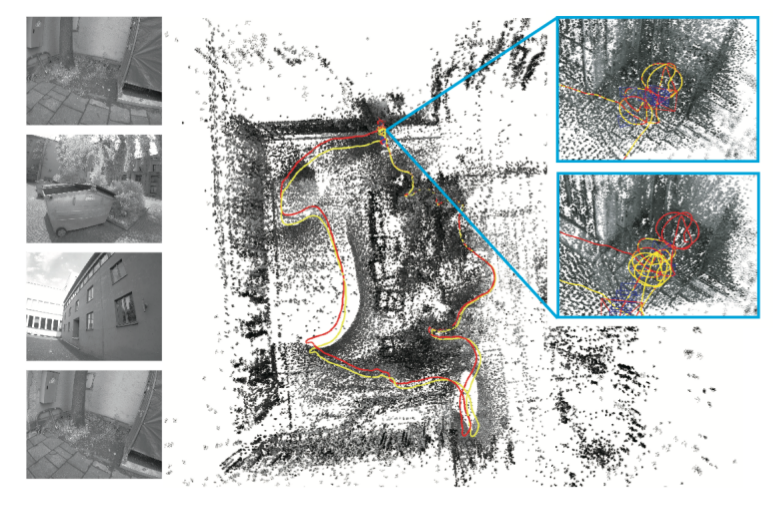
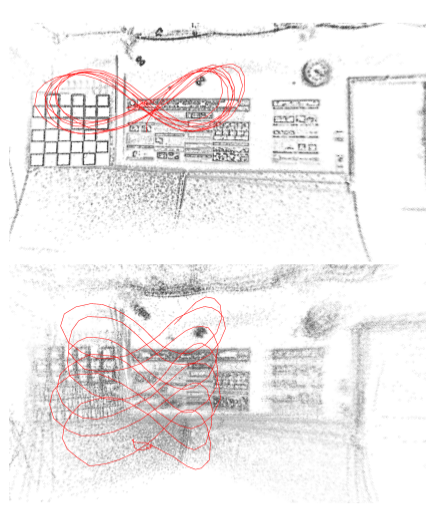
LDSO: Direct Sparse Odometry with Loop Closure , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv][video][code][project])
[] 
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv])
2015
[] 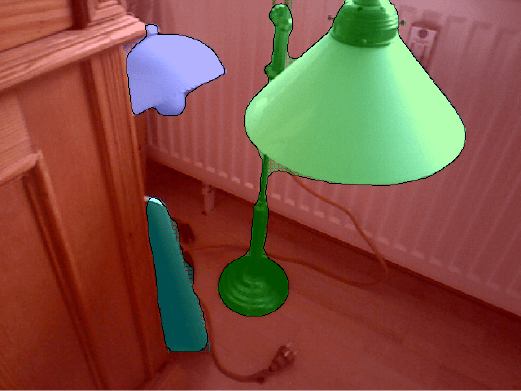
Interactive Multi-label Segmentation of RGB-D Images , In Scale Space and Variational Methods in Computer Vision (SSVM), 2015. ([code])
2010
[] 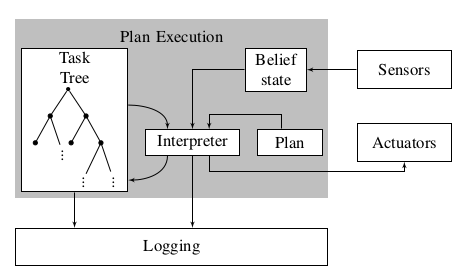
Becoming action-aware through reasoning about logged plan execution traces , In International Conference on Intelligent Robots and Systems (IROS), 2010.
Research
Check out the projects I'm involved in:
Bachelor Theses / Master Theses / IDP / Guided Research
If you are interested in doing a Bachelor Thesis, Master Thesis, Interdisciplinary Project (IDP) or Guided Research in the field of SLAM, Visual Odometry, 3D Reconstruction, or Sensor fusion, feel free to contact me via email. Please include your recent transcript and a brief CV, so I know a bit about your background and courses taken. Depending on the research project, some experience with C++ and Computer Vision is usually required.
Courses
- WS20: Practical course Vision Based Navigation together with David Schubert.
- WS19: Practical course Vision Based Navigation together with usenko.
- SS19: Practical course Vision Based Navigation together with usenko. Awarded by the department as best practical course 2018/19.
- WS18/19: Practical course Vision Based Navigation together with usenko. Awarded by the department as best practical course 2018/19.
- SS18: Tutorial for Computer Vision II: Multiple View Geometry together with Marvin Eisenberger. Lecturer: Prof. Dr. Daniel Cremers.
- WS17/18: Tutorial for Computer Vision I: Variational Methods together with Christiane Sommer. Lecturer: Dr. Yvain Queau.
Student Projects
Previously completed student projects include:
- Supervision (with Simon Weber): Tin Chon Chan, "Factor Grouping for Efficient Bundle Adjustment," Master Thesis, April 2022. report slides
- Co-supervision (with Christiane Sommer): Alexander Gaul, "Large Scale Photometric Bundle Adjustment," Interdisciplinary Project, October 2021. report slides
- Co-supervision (with Lukas Koestler): Dominik Muhle, "Frame-To-Frame Rotation Estimation under Uncertain Feature Positions for Visual Odometry," Master Thesis, September 2021. report slides paper
- External advisor (supervision: Dr. Cornelia Bühlmann, Prof. Paul Graham): Jose Adrian Vega Vermehren, "Biomimetic Visual Navigation: Understanding the Visual Ecology of Expert Navigators through Virtual Reality," Master Thesis, August 2021. report slides
- Supervision (with David Schubert): Zhakshylyk Nurlanov, "Exploring SO(3) logarithmic map: degeneracies and derivatives," Student Project, May 2021. report slides
- Supervision: Ahmed Agha, "Combining Direct and Indirect Features for Efficient Visual Inertial Odometry," Guided Research, April 2021. slides
- Co-supervision (with Aljosa Osep): Nikita Korobov, "Direct Object Tracking," Guided Research, April 2021. report slides
- External advisor (supervision: Markus Müller and Dr. Wolfgang Stürzl): Martin Wudenka, "Design and Implementation of an Odometry System for the ARDEA MAV Platform," Master Thesis, March 2021.
- Co-supervision (with Aljosa Osep): Anselm Coogan, "BAMOT: Bundle Adjustment for Multiple-Object Tracking - a Stereo-based Approach," Master Thesis, March 2021. thesis slides code
- Co-supervision (with Aljosa Osep): Maximilian Kempa, "Incorporating Large Vocabulary Object Detection and Tracking into Visual SLAM," Master Thesis, December 2020. thesis slides
- Co-supervision (with Nan Yang, Lukas Koestler): Rémi Piau, "Toward Fast Deep Visual Place Recognition," Internship, August 2020. slides
- Supervision: Xingwei Qu, "Photometric Based Loop Closure Correction and Pose Graph Optimization With Non-linear Factor Recovery," Interdisciplinary Project, July 2020. report
- Co-supervision (with Emanuel Laude): Florian Hofherr, "Joint Optimization of Pose And Depth Using a Prox-Linear Approach," Master Thesis, December 2019. thesis slides
- Supervision (with Tim Mehling): Pablo Rodríguez Palafox, "Local Tracking and Mapping for Direct Visual SLAM," Master Thesis, October 2019. thesis slides
- Co-supervision (with Dr. Ulrich Klank, Magazino GmbH): Kanstantsin Tkachuk, "3D Scene Reconstruction for 2D Object Recognition," Bachelor Thesis, September 2019. thesis slides
- Supervision (with Prof. Dr. Jörg Stückler): Anton Troynikov, "Photometric Odometry for Dynamic Objects," Master Thesis, April 2019. thesis slides Blog
- Co-Supervision (with Dr. Tao Wu, Emanuel Laude): Zhongnan Qu, "Efficient Optimization for Robust Bundle Adjustment," Master Thesis, March 2018. thesis slides


