Export as PDF, XML, TEX or BIB
Book Chapters | Journal Articles | Conference and Workshop Papers | Other Publications
Book Chapters
2012
[] Awareness of Road Scene Participants for Autonomous Driving , Chapter in Handbook of Intelligent Vehicles, Springer, 2012.
Book Chapters | Journal Articles | Conference and Workshop Papers | Other Publications
Journal Articles
2020
[] ARDEA—An MAV with skills for future planetary missions , In Journal of Field Robotics (JFR), 2020.
[] Relocalization With Submaps: Multi-Session Mapping for Planetary Rovers Equipped With Stereo Cameras , In IEEE Robotics and Automation Letters, volume 5, 2020.
2019
[] Augmented Autoencoders: Implicit 3D Orientation Learning for 6D Object Detection , In International Journal of Computer Vision, 2019.
2015
[] Introspective classification for robot perception , In The International Journal of Robotics Research (IJRR), 2015.
2010
[] Multiclass Multimodal Detection and Tracking in Urban Environments , In International Journal of Robotics Research, 2010.
2008
[] Monte Carlo localization in outdoor terrains using multilevel surface maps , In Journal of Field Robotics, volume 25, 2008.
2007
[] Non-iterative Vision-based Interpolation of 3D Laser Scans , In Autonomous Robots and Agents, volume 76, 2007.
[] An Efficient Extension to Elevation Maps for Outdoor Terrain Mapping and Loop Closing , In International Journal of Robotics Research (IJRR), volume 26, 2007.
[] Supervised semantic labeling of places using information extracted from sensor data , In Journal on Robotics and Autonomous Systems (RAS), volume 55, 2007.
Book Chapters | Journal Articles | Conference and Workshop Papers | Other Publications
Conference and Workshop Papers
2023
[] 
Learning Expressive Priors for Generalization and Uncertainty Estimation in Neural Networks , In International Conference on Machine Learning, 2023.
2022
[] Challenges of SLAM in extremely unstructured environments: the DLR Planetary Stereo, Solid-State LiDAR, Inertial Dataset , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] The Probabilistic Robot Kinematics Model and its Application to Sensor Fusion , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] Bayesian Active Learning for Sim-to-Real Robotic Perception , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] A Two-stage Learning Architecture that Generates High-Quality Grasps for a Multi-Fingered Hand , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] RECALL: Rehearsal-free Continual Learning for Object Classification , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] Towards Safety-Aware Pedestrian Detection in Autonomous Systems , In International Conference on Intelligent Robots and Systems (IROS), 2022.
[] Towards Robust Perception of Unknown Objects in the Wild , In ICRA Workshop on Robotic Perception and Mapping: Emerging Techniques, 2022.
[] Iterative Corresponding Geometry: Fusing Region and Depth for Highly Efficient 3D Tracking of Textureless Objects , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
[] Seeking Visual Discomfort: Curiosity-Driven Representations for Reinforcement Learning , In International Conference on Robotics and Automation (ICRA), 2022.
[] A Model for Multi-View Residual Covariances Based on Perspective Deformation , In International Conference on Robotics and Automation (ICRA), 2022.
2021
[] A Photorealistic Terrain Simulation Pipeline for Unstructured Outdoor Environments , In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[] Instance Segmentation in CARLA: Methodology and Analysis for Pedestrian-oriented Synthetic Data Generation in Crowded Scenes , In 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), IEEE, 2021.
[] Unknown Object Segmentation from Stereo Images , In International Conference on Intelligent Robots and Systems, 2021.
[] Multi-Modal Loop Closing in Unstructured Planetary Environments with Visually Enriched Submaps , In 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021.
[] Learning-Based Matching of 3D Submaps from Dense Stereo for Planetary-Like Environments , In International Conference on Advanced Robotics (ICAR), 2021.
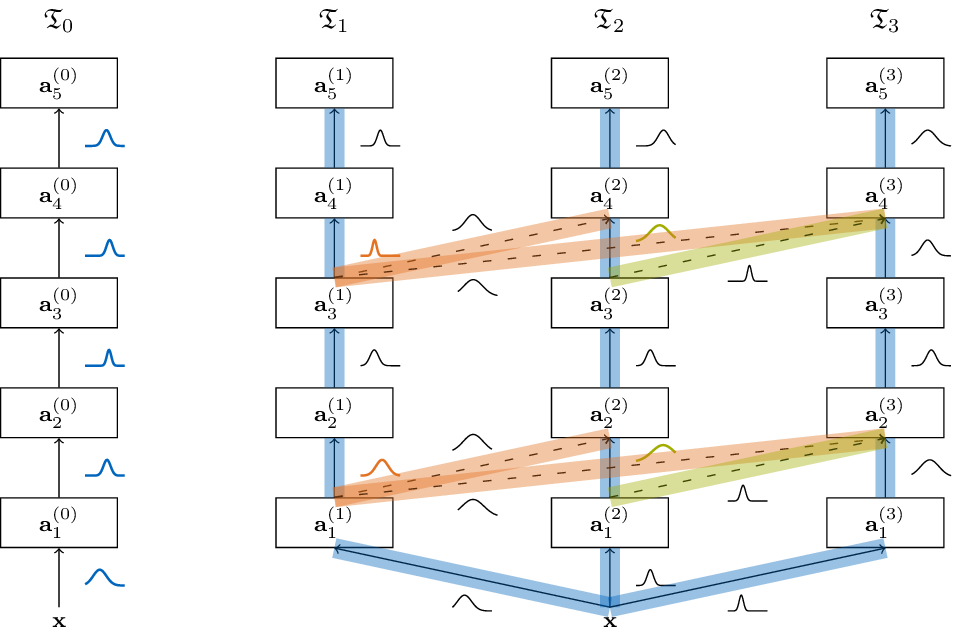
[] 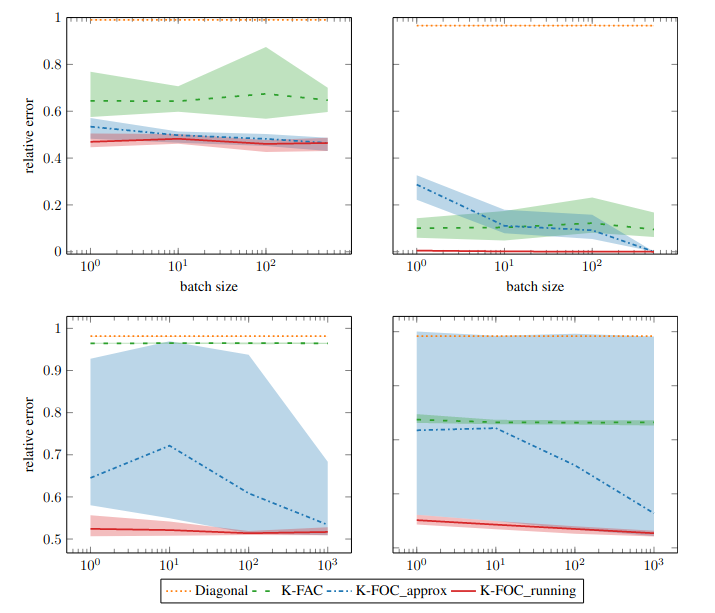
Kronecker-Factored Optimal Curvature , In Bayesian Deep Learning NeurIPS 2021 Workshop, 2021. ([poster])
[] Trust Your Robots! Predictive Uncertainty Estimation of Neural Networks with Sparse Gaussian Processes , In 5th Conference on Robot Learning (CoRL), 2021.
[] 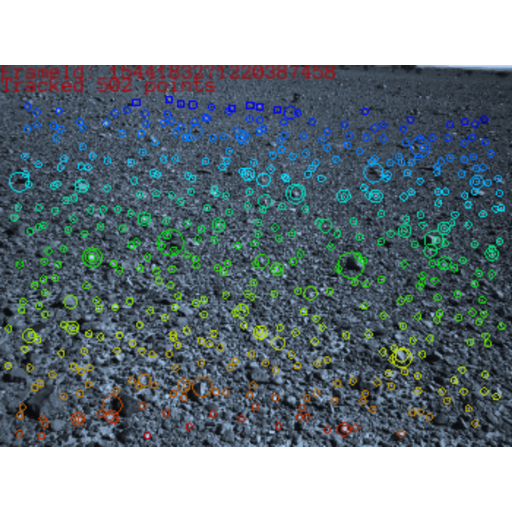
Towards Robust Monocular Visual Odometry for Flying Robots on Planetary Missions , In International Conference on Intelligent Robots and Systems (IROS), 2021. ([code][video])
[] From Evaluation to Verification: Towards Task-Oriented Relevance Metrics for Pedestrian Detection in Safety-Critical Domains , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops, 2021.
[] 
DOT: Dynamic Object Tracking for Visual SLAM , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 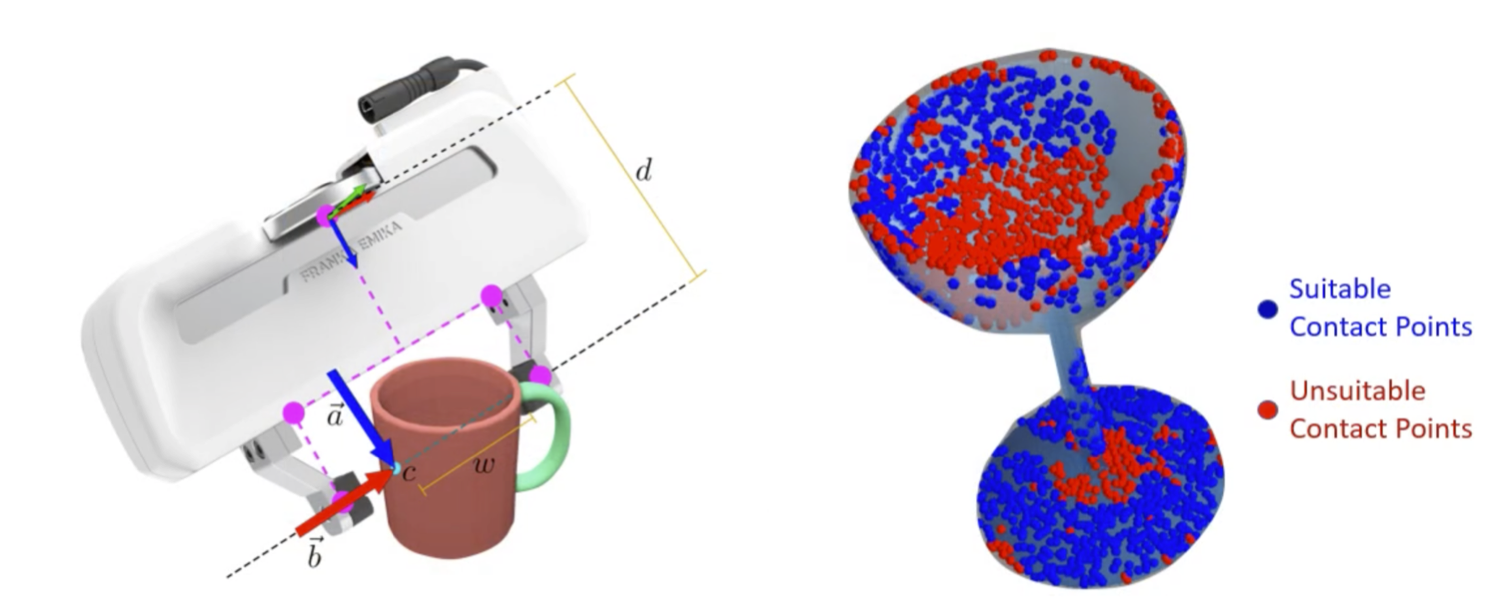
Contact-GraspNet: Efficient 6-DoF Grasp Generation in Cluttered Scenes , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
"What's This?" - Learning to Segment Unknown Objects from Manipulation Sequences , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
Exploration of Large Outdoor Environments Using Multi-Criteria Decision Making , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] 
Learning to Localize in New Environments from Synthetic Training Data , In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), 2021.
[] Robust Approaches for Localization on Multi-camera Systems in Dynamic Environments , In Proceedings of the IEEE International Conference on Automation, Robotics and Applications(ICARA), 2021.
2020
[] 
Robust Vision-Based Pose Correction for a Robotic Manipulator using Active Markers , In 17th International Symposium on Experimental Robotics (ISER), 2020. (to appear)
[] 
A Sparse Gaussian Approach to Region-Based 6DoF Object Tracking , In Asian Conference on Computer Vision, 2020. ()
Best Paper Award [] 
Incremental learning of EMG-based control commands using Gaussian Processes , In Conference on Robot Learning (CoRL), 2020. ()
[] 
Self-Supervised Object-in-Gripper Segmentation from Robotic Motions , In Conference on Robot Learning (CoRL), 2020. ()
[] 
Gaussian Process Gradient Maps for Loop-Closure Detection in Unstructured Planetary Environments , In International Conference on Intelligent Robots and Systems (IROS), 2020. (to appear)
[] 
Robust MUSIC-Based Sound Source Localization in Reverberant and Echoic Environments , In International Conference on Intelligent Robots and Systems (IROS), 2020. (to appear)
[] 
3D Scene Reconstruction from a Single Viewport , In European Conference on Computer Vision (ECCV), 2020.
[] 
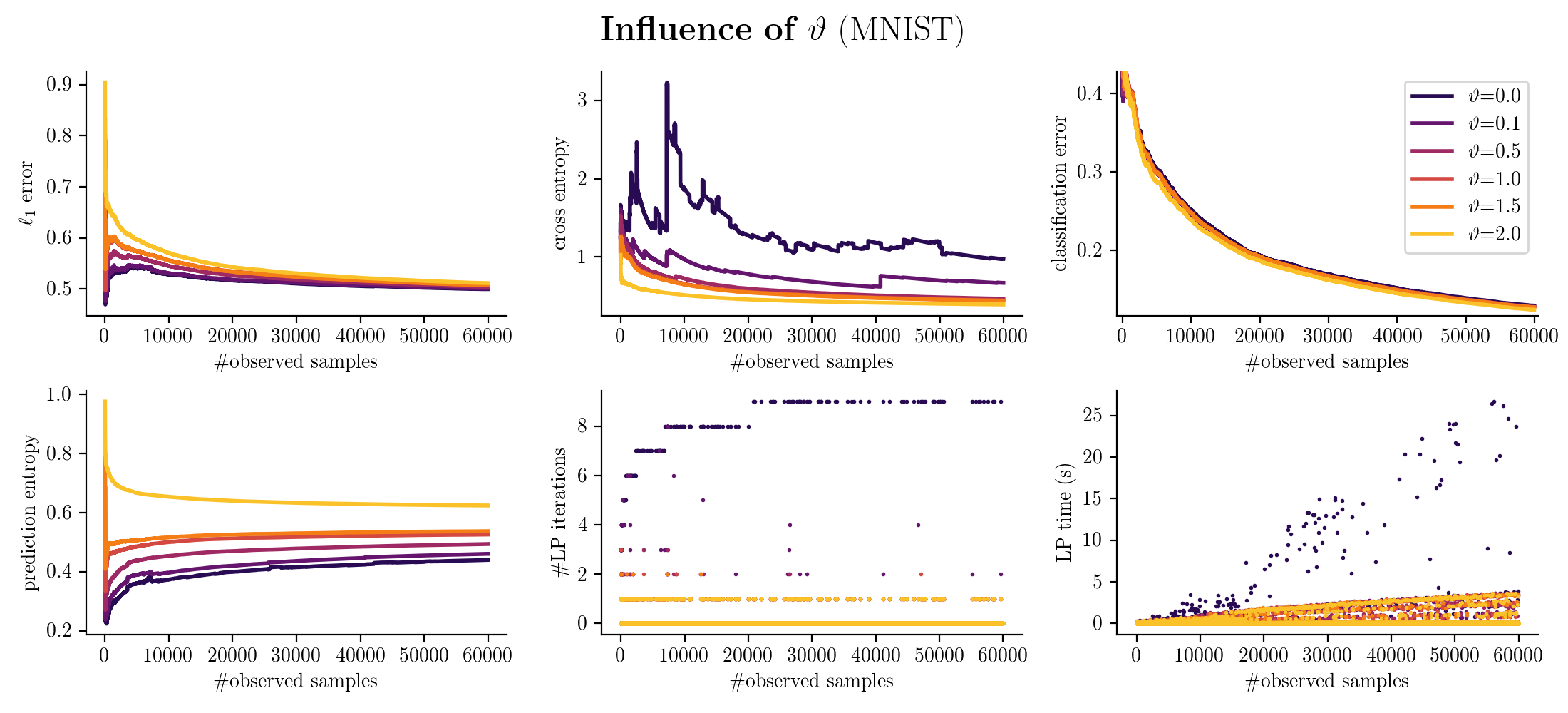
Effective Version Space Reduction for Convolutional Neural Networks , In European Conference on Machine Learning and Data Mining (ECML-PKDD), 2020. ([arxiv])
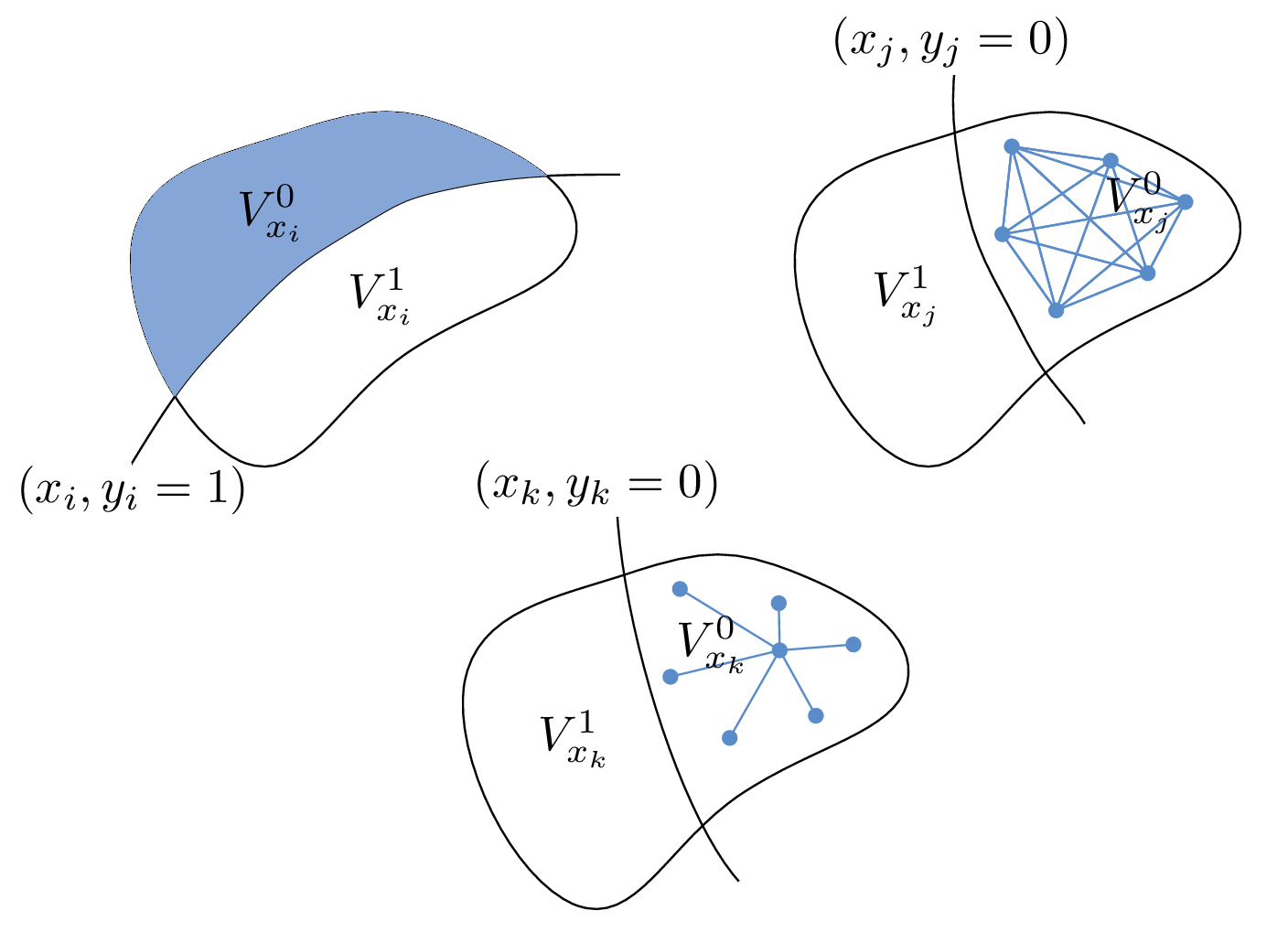
[] 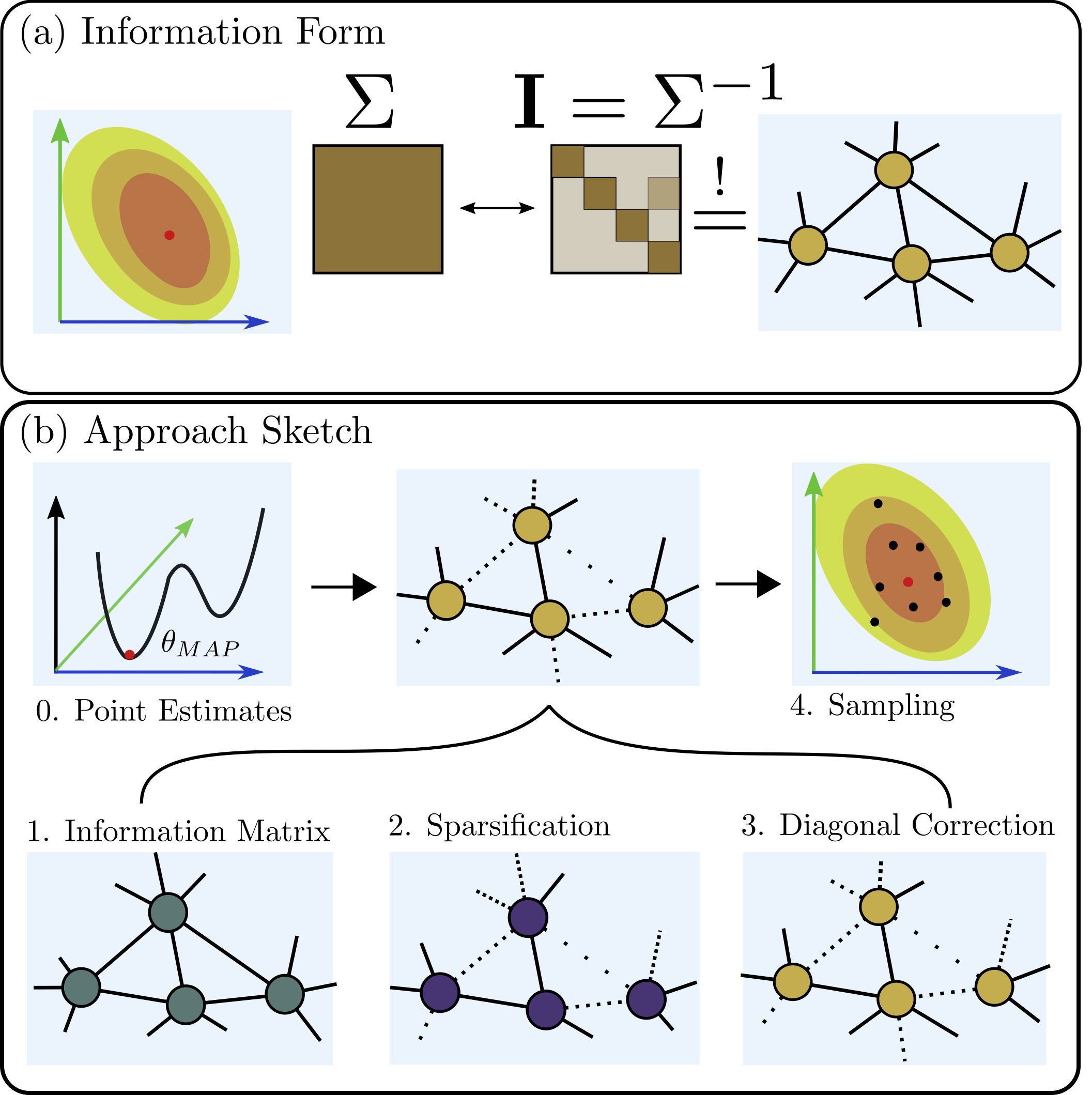
Estimating Model Uncertainty of Neural Networks in Sparse Information Form , In International Conference on Machine Learning (ICML), 2020.
[] 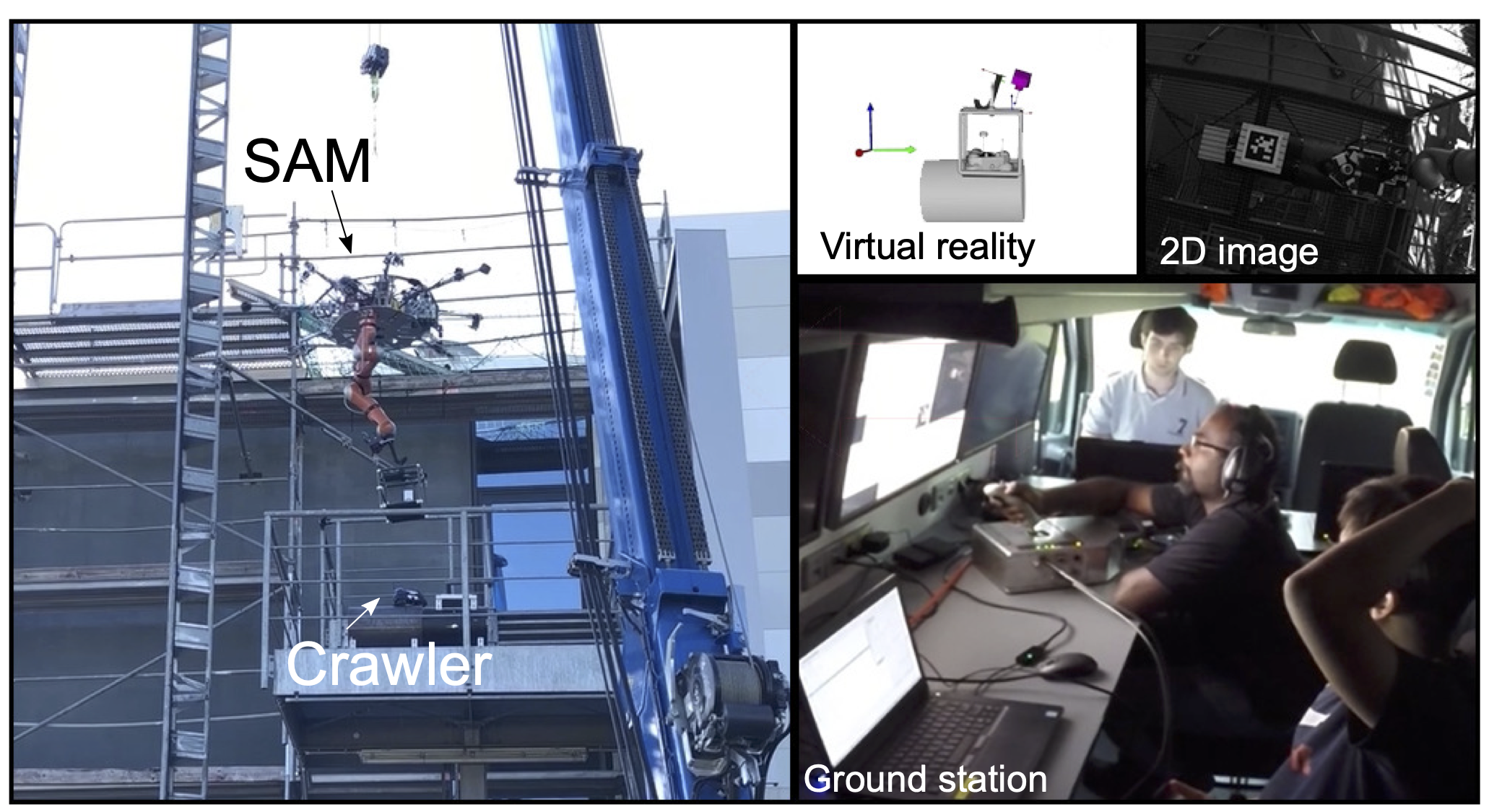
Visual-Inertial Telepresence for Aerial Manipulation , In International Conference on Robotics and Automation (ICRA), 2020.
[] 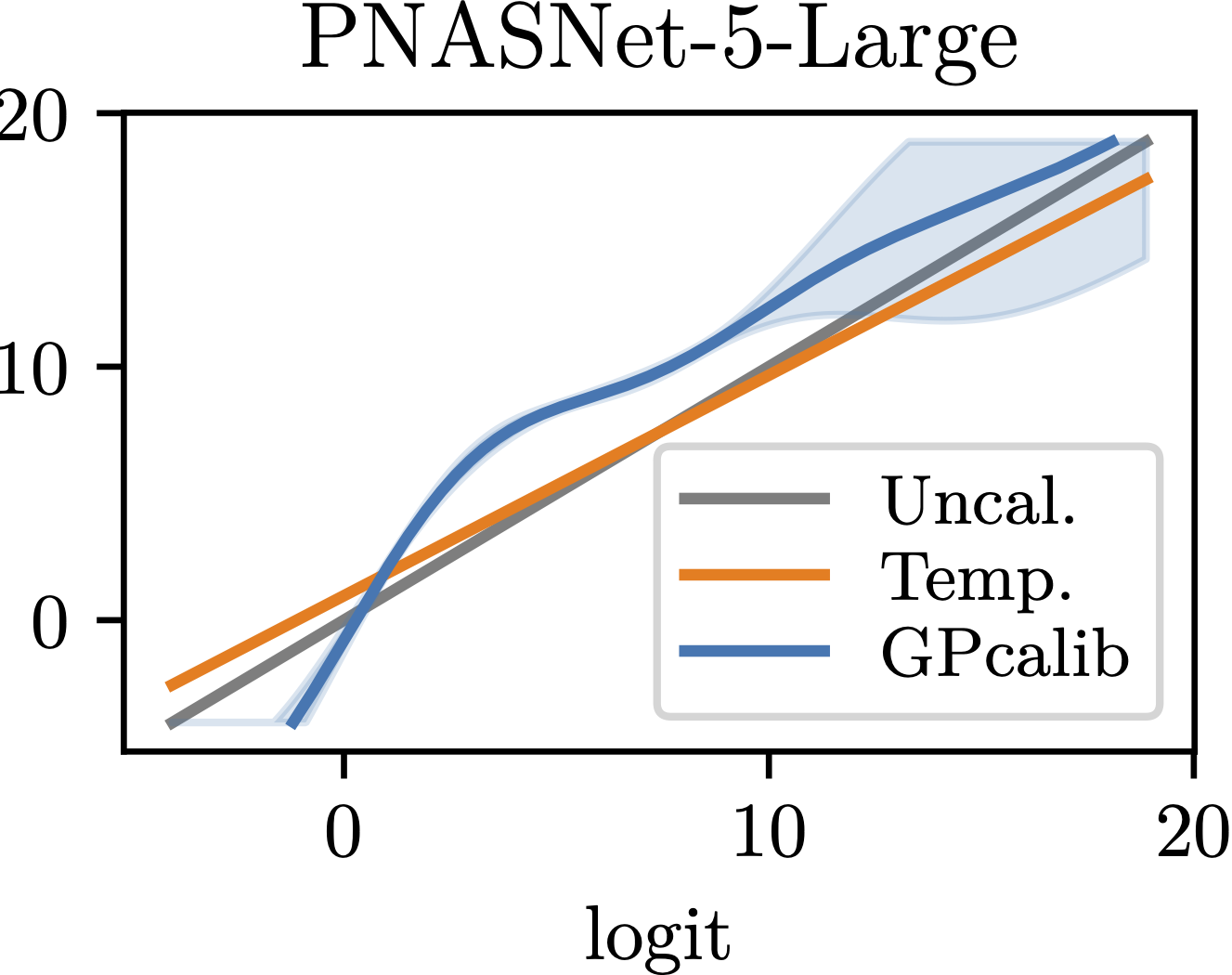
Non-Parametric Calibration for Classification , In International Conference on Artificial Intelligence and Statistics (AISTATS), 2020.
[] 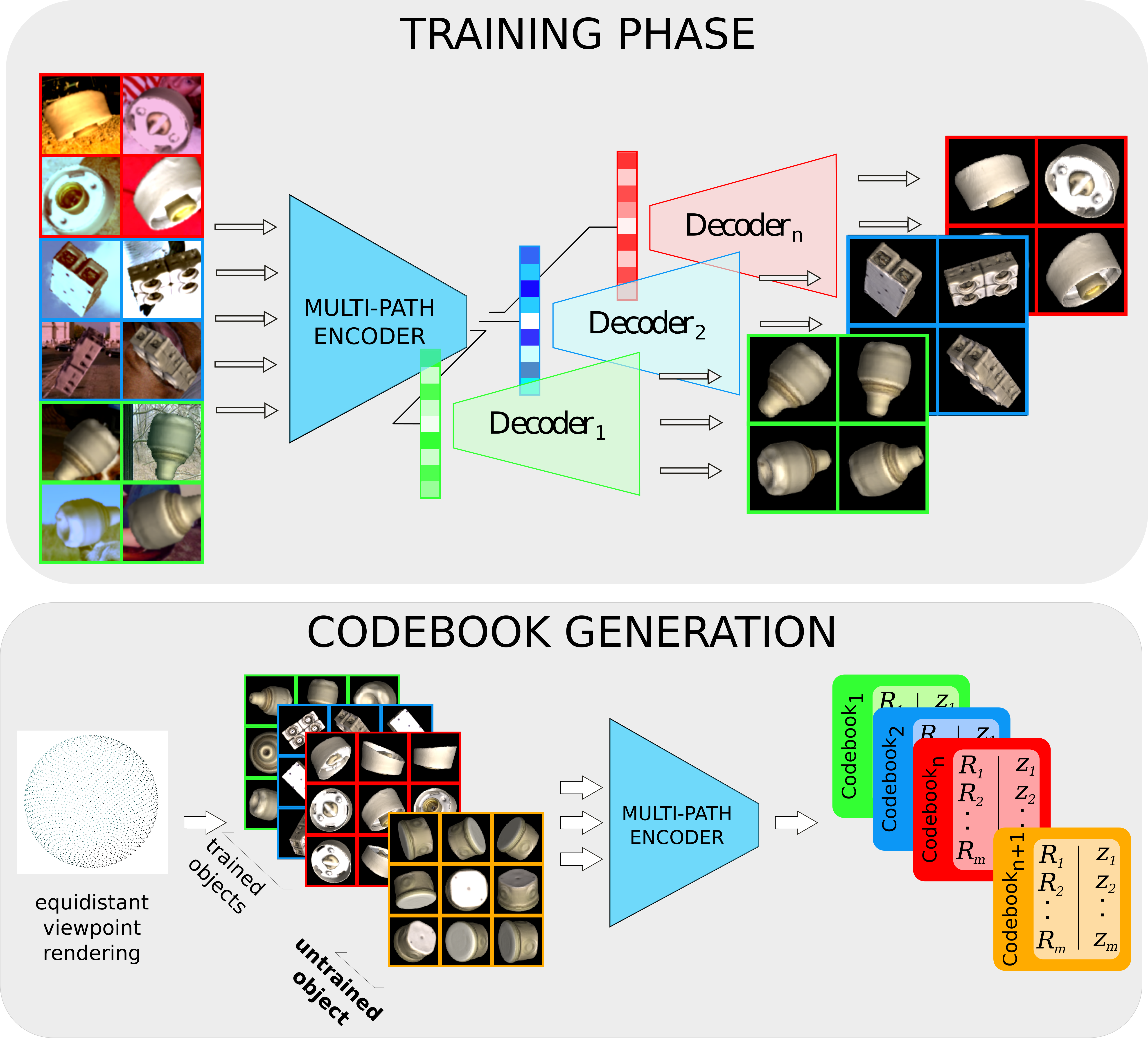
Multi-path Learning for Object Pose Estimation Across Domains , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
[] 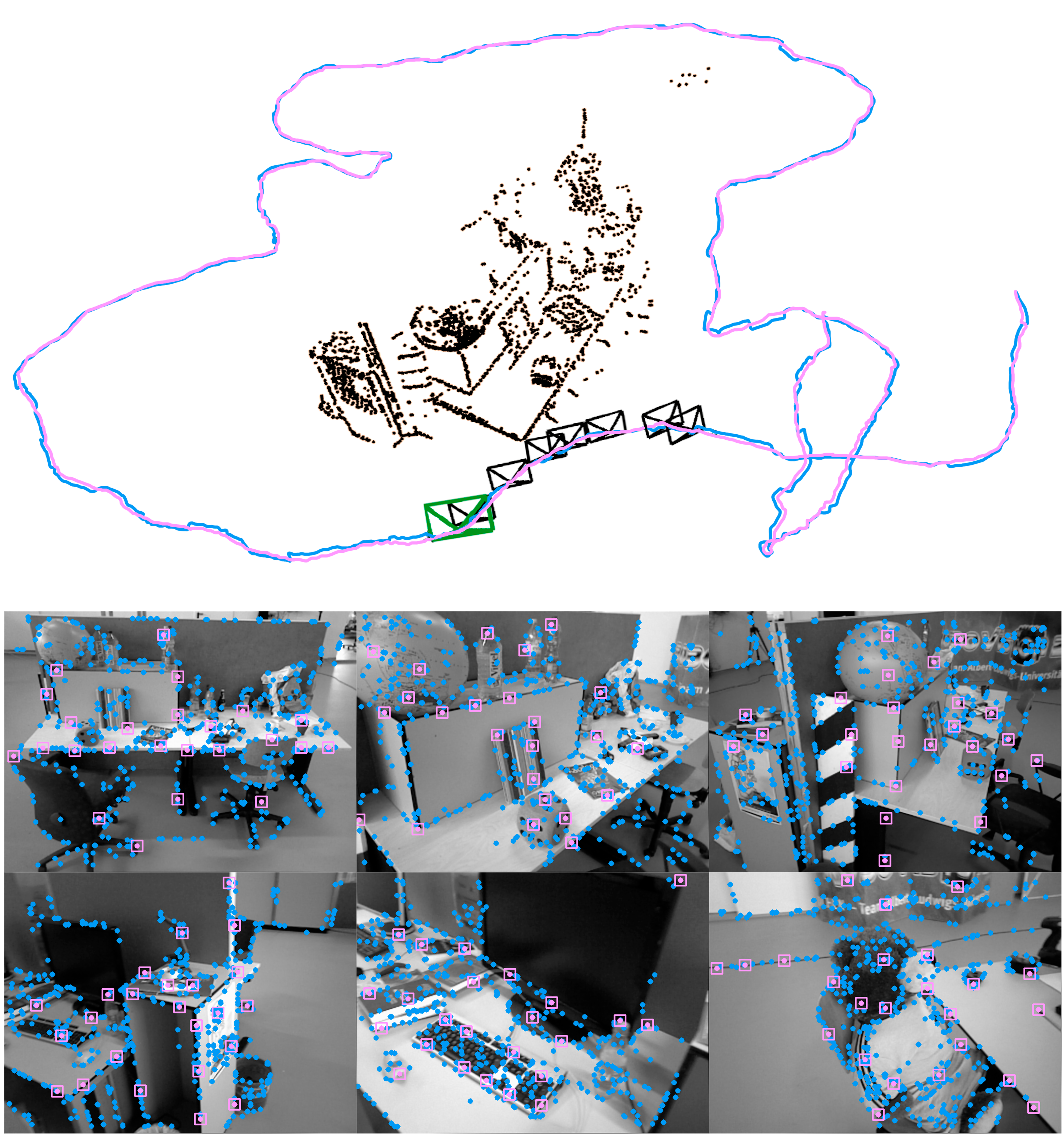
Information-Driven Direct RGB-D Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2019
[] Introspective Robot Perception using Smoothed Predictions from Bayesian Neural Networks , In International Symposium on Robotics Research (ISRR), 2019.
[] Visual-inertial sensor fusion with a bio-inspired polarization compass for navigation of MAVs , In 11th International Micro Air Vehicle Competition and Conference (IMAV), 2019.
[] Visual Repetition Sampling for Robot Manipulation Planning , In International Conference on Robotics and Automation (ICRA), 2019.
2018
[] Simultaneous Calibration and Mapping , In International Symposium on Experimental Robotics (ISER), 2018.
[] 6DoF Pose Estimation for Industrial Manipulation based on Synthetic Data , In International Symposium on Experimental Robotics (ISER), 2018.
[] 
Incremental Semi-Supervised Learning from Streams for Object Classification , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([code])
[] Appearance-Based Along-Route Localization for Planetary Missions , In International Conference on Intelligent Robots and Systems (IROS), 2018.
[] Persistent Anytime Learning of Objects from Unseen Classes , In International Conference on Intelligent Robots and Systems (IROS), 2018.
Best Cognitive Robotics Paper Finalist [] Implicit 3D Orientation Learning for 6D Object Detection from RGB Images , In European Conference on Computer Vision (ECCV), 2018.
Best Paper Award [] Semantic Labeling of Indoor Environments from 3D RGB Maps , In International Conference on Robotics and Automation (ICRA), 2018.
2017
[] Experience-based Optimization of Robotic Perception , In International Conference on Advanced Robotics (ICAR), 2017.
[] How Robots Learn to Classify New Objects Trained from Small Data Sets , In Conference on Robot Learning (CoRL), 2017.
[] A Method for Hand-Eye and Camera-to-Camera Calibration for Limited Fields of View , In International Conference on Intelligent Robots and Systems (IROS), 2017.
[] Selecting CNN Features for Online Learning of 3D Objects , In International Conference on Intelligent Robots and Systems (IROS), 2017.
2016
[] 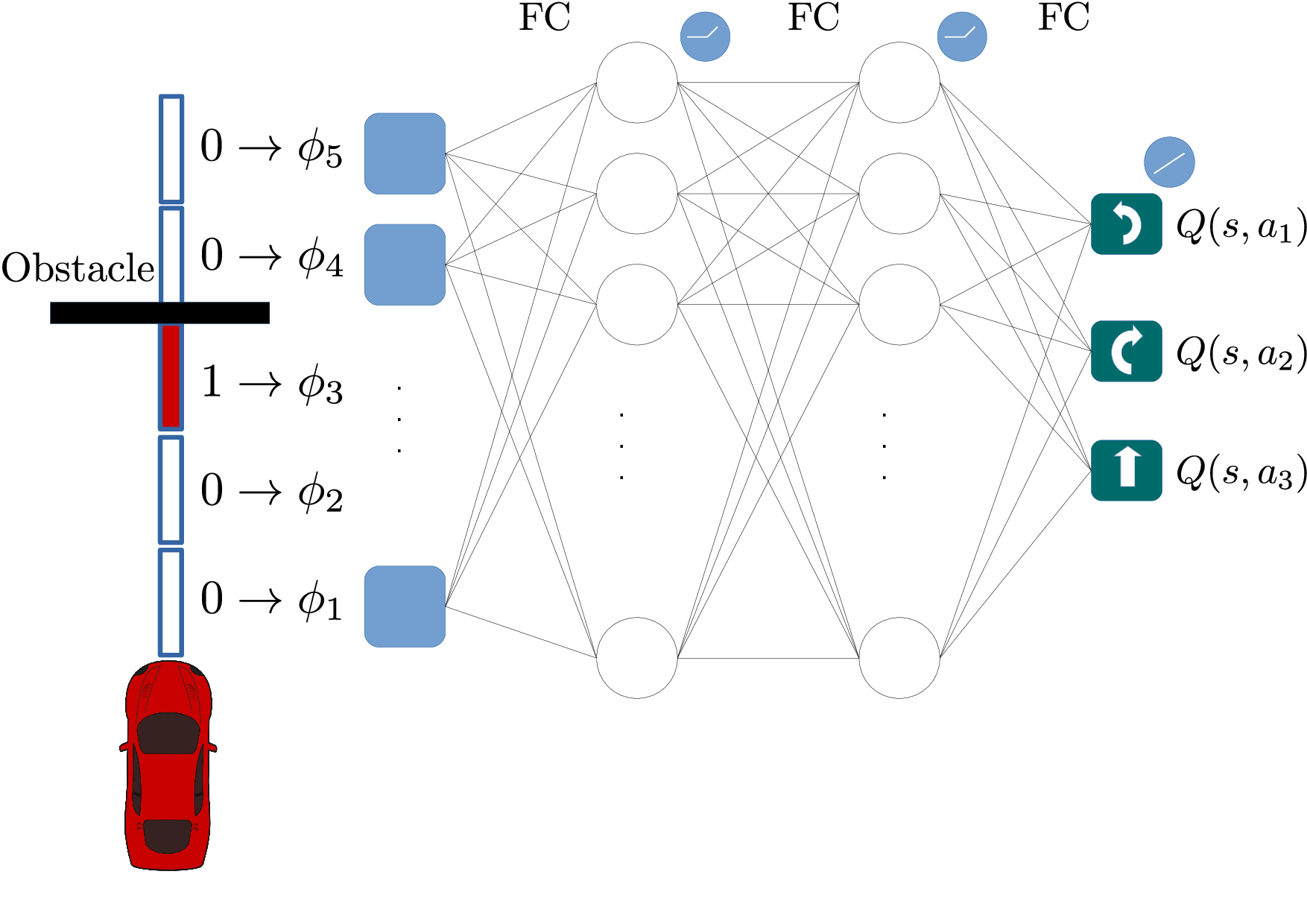
Learning to Drive using Inverse Reinforcement Learning and Deep Q-Networks , In , NIPS Workshops, 2016. ([arxiv])
[] 
Non-Rigid 3D Shape Retrieval via Large Margin Nearest Neighbor Embedding , In European Conference on Computer Vision (ECCV), 2016. ([code])
[] 
Stream-based Active Learning for Efficient and Adaptive Classification of 3D Objects , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
CAPTCHA Recognition with Active Deep Learning , In GCPR Workshop on New Challenges in Neural Computation, 2015. ([code])
[] 
Semi-supervised Online Learning for Efficient Classification of Objects in 3D Data Streams , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] 
SPENCER: A Socially Aware Service Robot for Passenger Guidance and Help in Busy Airports , In Proc. Field and Service Robotics (FSR), 2015.
[] 
Active Online Confidence Boosting for Efficient Object Classification , In Proc. IEEE International Conference on Robotics and Automation (ICRA), 2015.
2014
[] 
Environment-adaptive Learning: How Clustering Helps to Obtain Good Training Data , In KI 2014: Advances in Artificial Intelligence (C Lutz, M Thielscher, eds.), Springer, 2014.
[] 
Active Online Learning for Interactive Segmentation Using Sparse Gaussian Processes , In German Conference on Pattern Recognition, 2014.
[] 
Optimal Intrinsic Descriptors for Non-Rigid Shape Analysis , In British Machine Vision Conference (BMVC), 2014.
2013
[] Driven Learning for Driving: How Introspection Improves Semantic Mapping , In The International Symposium on Robotics Research (ISRR), 2013.
[] Introspective Active Learning for Scalable Semantic Mapping , In Workshop on Active Learning in Robotics: Exploration, Curiosity, and Interaction at Robotics: Science and Systems, 2013.
[] Confidence Boosting: Improving the Introspectiveness of a Boosted Classifier for Efficient Learning , In Autonomous Learning Workshop at ICRA, 2013.
[] Knowing When We Don’t Know: Introspective Classification for Mission-Critical Decision Making , In IEEE International Conference on Robotics and Automation (ICRA), 2013.
[] Toward Automated Driving in Cities using Close-to-Market Sensors , In Proc. of IEEE Intelligent Vehicles Symposium, 2013.
2012
[] Parsing Outdoor Scenes from Streamed 3D Laser Data Using Online Clustering and Incremental Belief Updates , In Robotics Track of AAAI Conference on Artificial Intelligence, 2012.
[] Semantic Categorization of Outdoor Scenes with Uncertainty Estimates using Multi-Class Gaussian Process Classification , In Proc. of the International Conference on Intelligent Robots and Systems (IROS), 2012.
2011
[] Bayesian On-line Learning of Driving Behaviors , In International Conference on Robotics and Automation (ICRA), 2011.
[] Unsupervised 3D Object Discovery and Categorization for Mobile Robots , In Proc. of the International Symposium on Robotics Research (ISRR), 2011.
2010
[] Inferring the Semantics of Direction Signs in Public Places , In International Conference on Robotics and Automation (ICRA), 2010.
[] Unsupervised Discovery of Repetitive Objects , In International Conference on Robotics and Automation (ICRA), 2010.
[] A Layered Approach to People Detection in 3D Range Data , In special track on Physically Grounded AI of AAAI, 2010.
[] Segmentation and Unsupervised Part-based Discovery of Repetitive Objects , In Robotics: Science and Systems, 2010.
[] Exploiting Repetitive Object Patterns for Model Compression and Completion , In European Conference on Computer Vision, 2010.
[] 
A Bayesian Approach to Learning 3D Representations of Dynamic Environments , In Proc. of The 12th International Symposium on Experimental Robotics (ISER), Springer Press, 2010.
2009
[] Medial Features for Superpixel Segmentation , In Proc. of the IAPR Conference on Machine Vision Applications (MVA), 2009.
[] Multiclass Multimodal Detection and Tracking in Urban Environments , In Proc. of Field and Service Robotics (FSR), 2009.
[] Detecting Pedestrians at Very Small Scales , In Proc. of the International Conference on Intelligent Robots and Systems (IROS), 2009.
2008
[] Multimodal People Detection and Tracking in Crowded Scenes , In Proc. of the Twenty-Third Conference on Artificial Intelligence (AAAI), 2008.
[] Multimodal Detection and Tracking of Pedestrians in Urban Environments with Explicit Ground Plane Extraction , In Proc. of the International Conference on Intelligent Robots and Systems (IROS), 2008.
2007
[] Instance-based AMN Classification for Improved Object Recognition in 2D and 3D Laser Range Data , In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2007.
[] Towards Mapping of Cities , In International Conference on Robotics and Automation (ICRA), 2007.
[] Recovering the Shape of Objects in 3D Point Clouds with Partial Occlusions , In Proc. of the 6th International Conference on Field and Service Robotics (FSR), 2007.
[] Active Monte Carlo Localization in Outdoor Terrains using Multi-Level Surface Maps , In Fachgespräche Autonome Mobile Systeme (AMS), 2007.
[] Collective Classification for Labeling of Places and Objects in 2D and 3D Range Data , In Proc. of the 31th Annual Conference of the German Classification Society on Data Analysis, Machine Learning, and Applications, 2007.
2006
[] Vision-based Interpolation of 3D Laser Scans , In Proc. International Conference on Autonomous Robots and Agents (ICARA), 2006.
[] Robust 3D Scan Point Classification using Associative Markov Networks , In International Conference on Robotics and Automation (ICRA), 2006.
[] Multi-Level Surface Maps for Outdoor Terrain Mapping and Loop Closing , In Proc. of the International Conference on Intelligent Robots and Systems(IROS), 2006.
2005
[] Using Hierarchical EM to Extract Planes from 3D Range Scans , In International Conference on Robotics and Automation (ICRA), 2005.
[] Improving Simultaneous Localization and Mapping in 3D Using Global Constraints , In Proc. of the Twentieth National Conference on Artificial Intelligence (AAAI), 2005.
[] Improving Plane Extraction from 3D Data by Fusing Laser Data and Vision , In Proc. of the International Conference on Intelligent Robots and Systems(IROS), 2005.
2004
[] First steps towards a robotic system for flexible volumetric mapping of indoor environments , In Proc. of the 5th IFAC/EURON Symposium on Intelligent Autonomous Vehicles (IAV), 2004.
2003
[] Map Building with Mobile Robots in Dynamic Environments , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2003.
[] A system for volumetric robotic mapping of underground mines , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2003.
Book Chapters | Journal Articles | Conference and Workshop Papers | Other Publications
Other Publications
2015
[] Approaches for Efficient and Autonomous Learning in Robotics and Computer Vision , Habilitation thesis at TU Munich, Dep. of Computer Science, 2015.
Computer Vision GroupTUM School of Computation, Information and Technology
Technical University of Munich
Technical University of Munich
Links
Informatik IX
|
|
Rechte Seite
Informatik IX
|


