
Prof. Dr. Jörg Stückler
Visiting Professor
Technical University of MunichSchool of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Tel: +49-(0)89-289-17792
Fax: +49-89-289-17757
Office:
Mail: joerg.stueckler@in.tum.de
News
As of April 1st, 2018, I am a Max Planck Research Group leader at the MPI for Intelligent Systems in Tübingen. My new website (including my new contact details) will be here. Inquiries about Master theses and internships at MPI-IS are welcome (please include your CV, motivation letter with research interests and BSc/MSc transcripts).
Publications
Export as PDF, XML, TEX or BIB
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
Book Chapters
2015
[] Perception of Deformable Objects and Compliant Manipulation for Service Robots , Chapter in Soft Robotics: From Theory to Applications (A. ASO. BA. R A. Verl, ed.), Springer, 2015. (to appear)
2014
[] Active Recognition and Manipulation for Mobile Robot Bin Picking , Chapter in Gearing Up and Accelerating Cross‐fertilization between Academic and Industrial Robotics Research in Europe: Technology Transfer Experiments from the ECHORD Project, Springer, 2014.
[] Increasing Flexibility of Mobile Manipulation and Intuitive Human-Robot Interaction in RoboCup@Home , Chapter in RoboCup 2013, Robot Soccer World Cup XVII, Springer, 2014.
2013
[] NimbRo@Home: Winning Team of the RoboCup@Home Competition 2012 , Chapter in RoboCup 2012, Robot Soccer World Cup XVI, Springer, 2013.
2012
[] Towards Robust Mobility, Flexible Object Manipulation, and Intuitive Multimodal Interaction for Domestic Service Robots , Chapter in RoboCup 2011, Robot Soccer World Cup XV, Springer, 2012.
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
Journal Articles
2020
[] 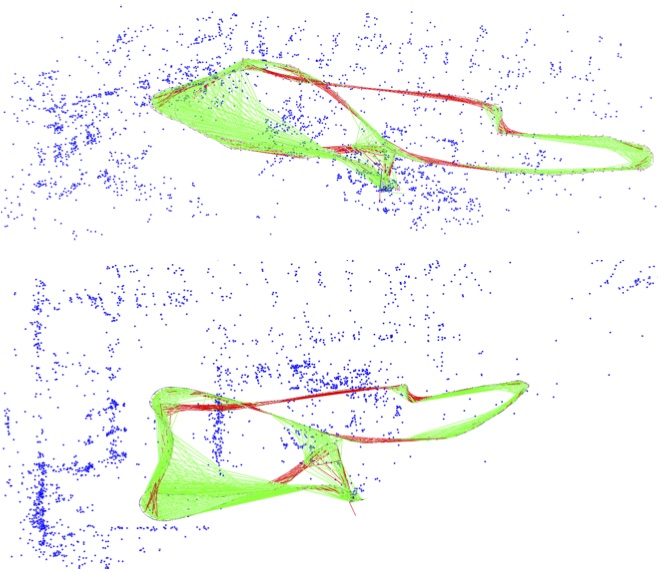
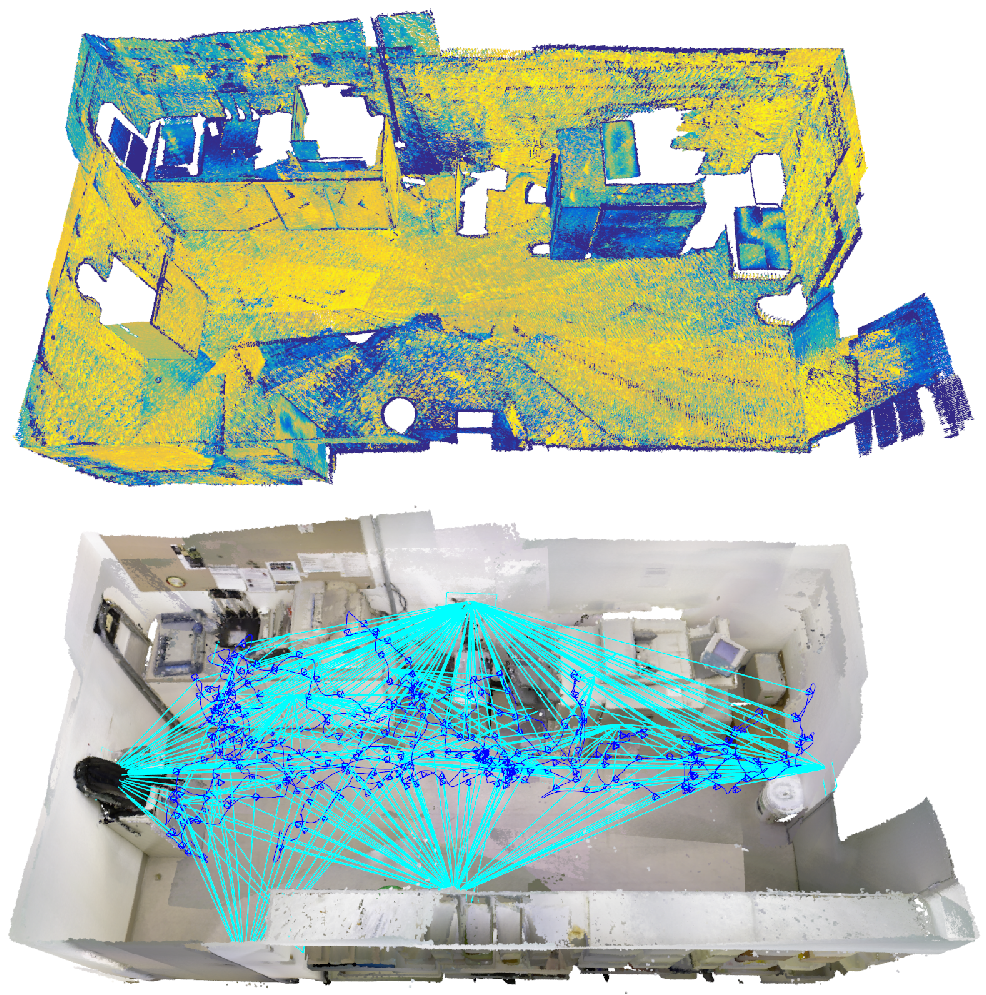
Visual-Inertial Mapping with Non-Linear Factor Recovery , In IEEE Robotics and Automation Letters (RA-L) & Int. Conference on Intelligent Robotics and Automation (ICRA), IEEE, volume 5, 2020. ([arxiv])
2018
[] 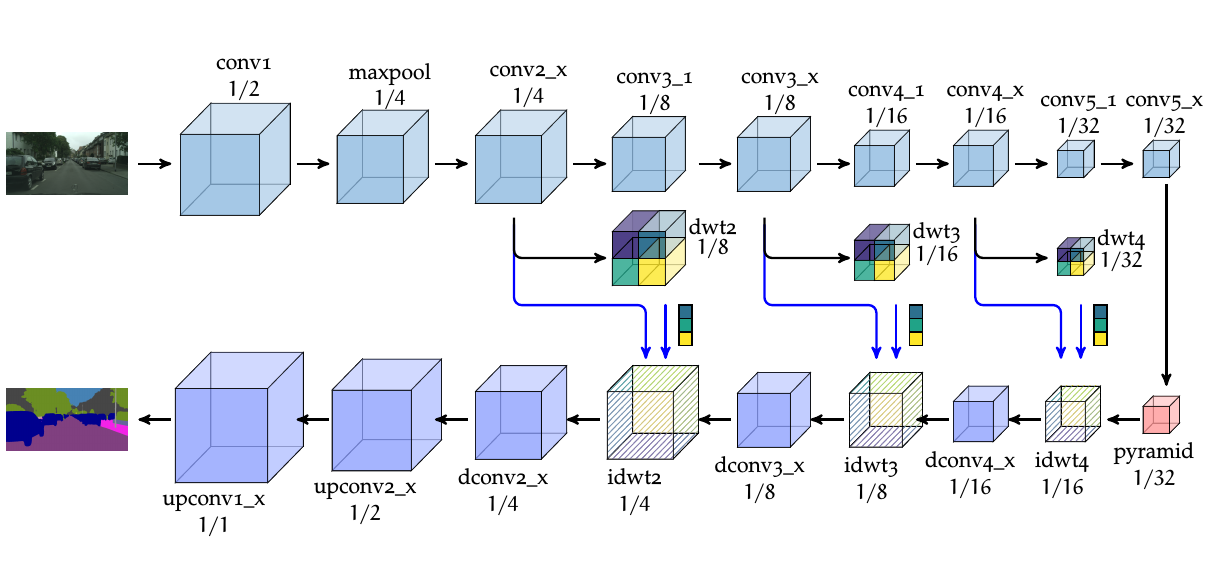
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform , In , 2018. ([arxiv])
[] 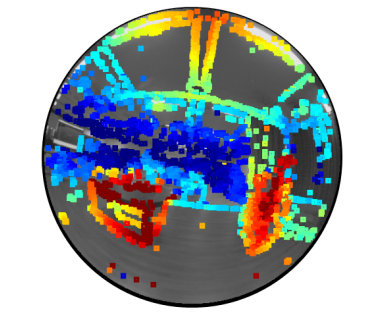
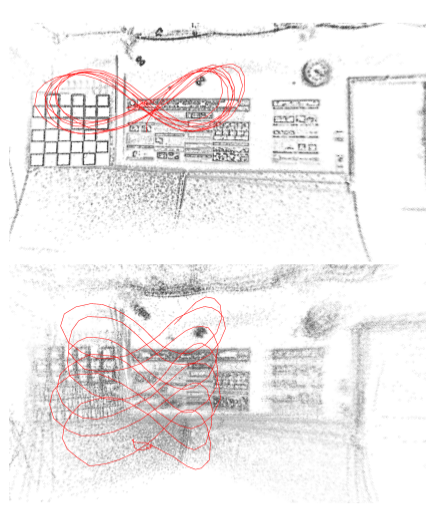
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras , In IEEE Robotics and Automation Letters & Int. Conference on Intelligent Robots and Systems (IROS), IEEE, 2018. ([arxiv])
2015
[] Multi-Layered Mapping and Navigation for Autonomous Micro Aerial Vehicles , In Journal of Field Robotics, 2015. (to appear)
[] NimbRo Explorer: Semi-Autonomous Exploration and Mobile Manipulation in Rough Terrain , In Journal of Field Robotics, 2015. (to appear)
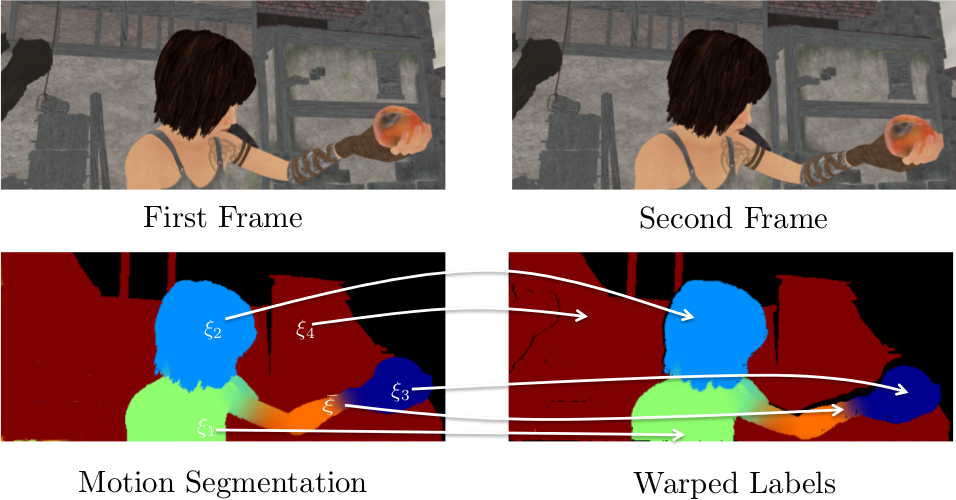
[] Efficient Dense Rigid-Body Motion Segmentation and Estimation in RGB-D Video , In International Journal of Computer Vision, Springer US, 2015.
2014
[] Multi-Resolution Surfel Maps for Efficient Dense 3D Modeling and Tracking , In Journal of Visual Communication and Image Representation, volume 25, 2014.
[] Dense Real-Time Mapping of Object-Class Semantics from RGB-D Video , In Journal of Real-Time Image Processing, Springer, 2014.
[] Rough Terrain Mapping and Navigation using a Continuously Rotating 2D Laser Scanner , In Künstliche Intelligenz, Springer, volume 28, 2014.
2012
[] RoboCup@Home: Demonstrating Everyday Manipulation Skills in RoboCup@Home , In IEEE Robotics and Automation Magazine, volume 19, 2012.
[] Efficient 3D Object Perception and Grasp Planning for Mobile Manipulation in Domestic Environments , In Robotics and Autonomous Systems, volume 61, 2012.
2008
[] Hierarchical Reactive Control for Humanoid Soccer Robots , In International Journal of Humanoid Robots, volume 5, 2008.
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
Conference and Workshop Papers
2020
[] 
DirectShape: Photometric Alignment of Shape Priors for Visual Vehicle Pose and Shape Estimation , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2020. ([video][presentation][project page][supplementary][arxiv])
2018
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 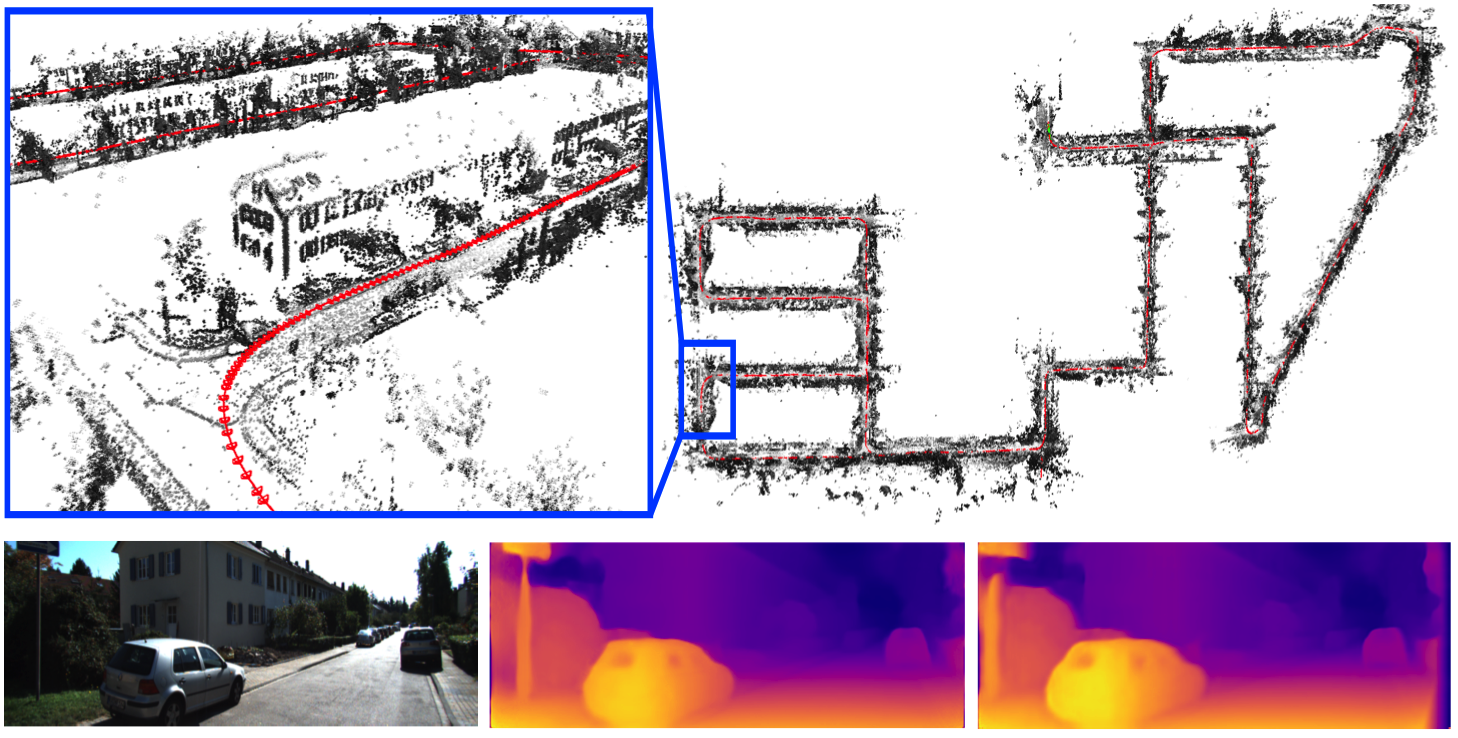
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry , In European Conference on Computer Vision (ECCV), 2018. ([arxiv],[supplementary],[project])
Oral Presentation [] 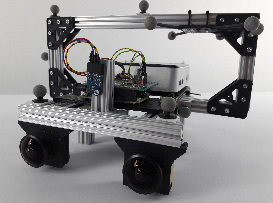
The TUM VI Benchmark for Evaluating Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv])
2017
[] SAMP: Shape and Motion Priors for 4D Vehicle Reconstruction , In IEEE Winter Conference on Applications of Computer Vision, WACV, 2017.
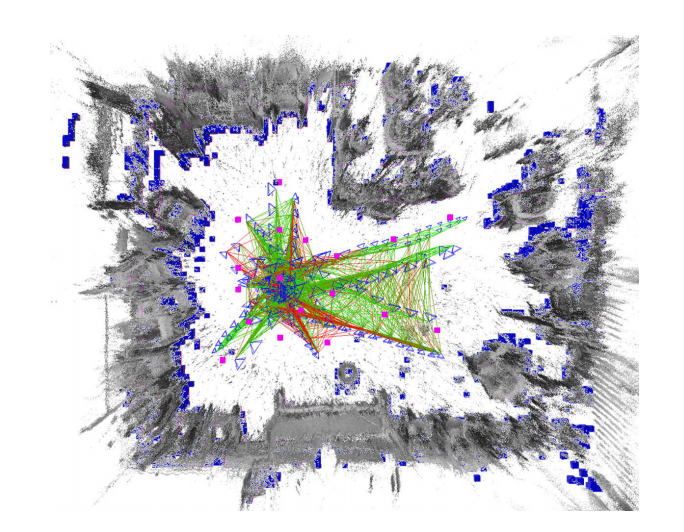
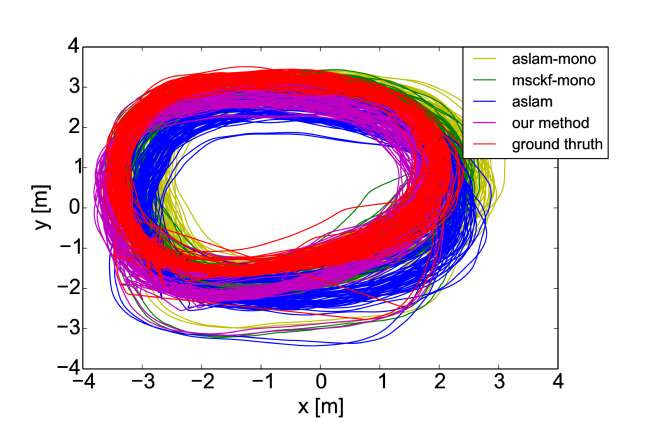
[] Keyframe-Based Visual-Inertial Online SLAM with Relocalization , In IEEE/RSJ Int. Conference on Intelligent Robots and Systems, IROS, 2017.
[] Semi-Supervised Deep Learning for Monocular Depth Map Prediction , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017.
[] 
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])
[] 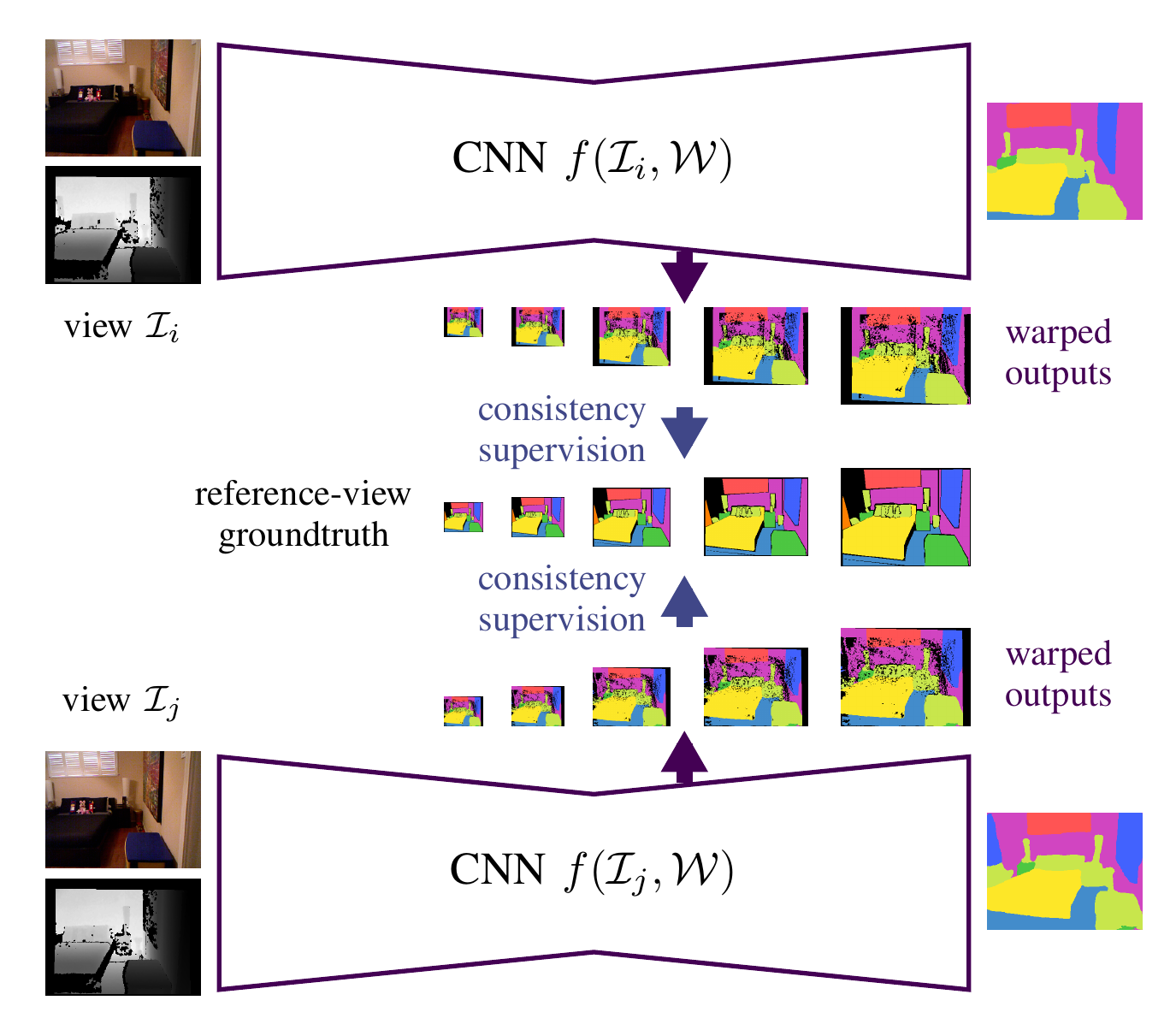
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2017.
2016
[] Joint Object Pose Estimation and Shape Reconstruction in Urban Street Scenes Using 3D Shape Priors , In Proc. of the German Conference on Pattern Recognition (GCPR), 2016.
[] Scene Flow Propagation for Semantic Mapping and Object Discovery in Dynamic Street Scenes , In IEEE/RSJ Int. Conference on Intelligent Robots and Systems, IROS, 2016.
[] Unsupervised Learning of Shape-Motion Patterns for Objects in Urban Street Scenes , In British Machine Vision Conference (BMVC), 2016.
[] 
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM , In International Conference on Robotics and Automation (ICRA), 2016.
[] 
Direct Visual-Inertial Odometry with Stereo Cameras , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video][supplementary][datasets])
[] 
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images , In Proc. of the Int. Conference on 3D Vision (3DV), 2015. ([video])
[] 
Reconstructing Street-Scenes in Real-Time From a Driving Car , In Proc. of the Int. Conference on 3D Vision (3DV), 2015.
[] 
Super-Resolution Keyframe Fusion for 3D Modeling with High-Quality Textures , In International Conference on 3D Vision (3DV), 2015. ([slides] [poster])
[] 
Large-Scale Direct SLAM with Stereo Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] Real-Time Object Detection, Localization and Verification for Fast Robotic Depalletizing , In International Conference on Intelligent Robots and Systems (IROS), 2015.
2014
[] Mobile Teleoperation Interfaces with Adjustable Autonomy for Personal Service Robots , In Proceedings of the 2014 ACM/IEEE International Conference on Human-robot Interaction, Advances in Computational Mathematics, 2014.
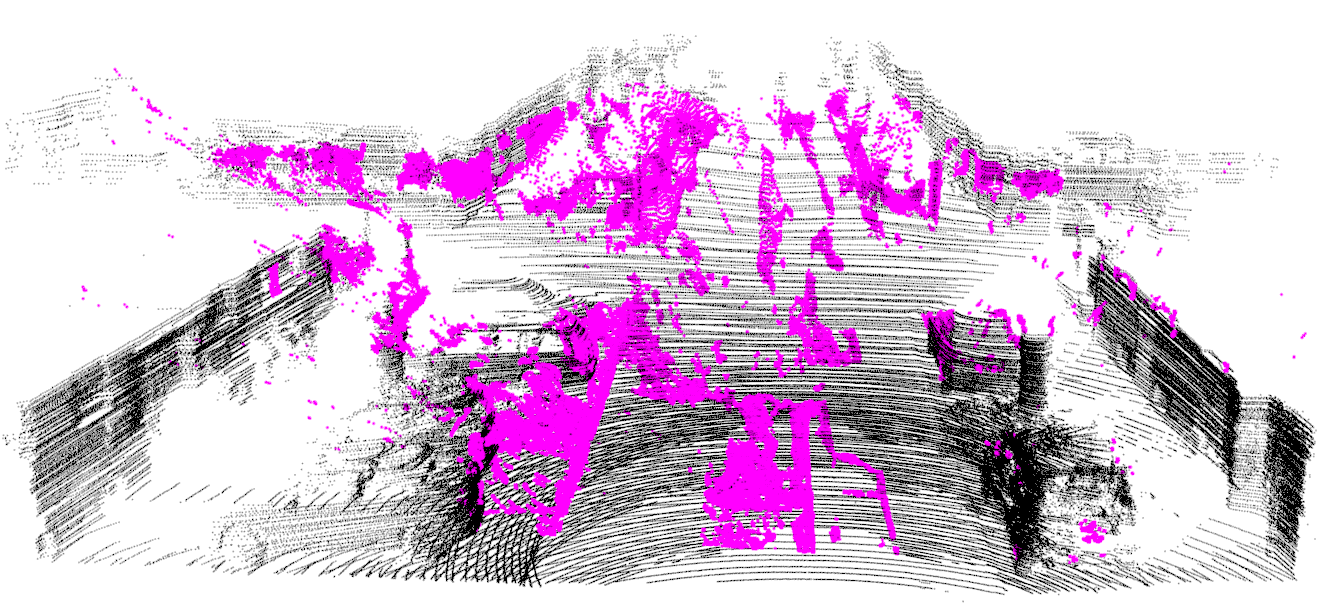
[] Local multi-resolution representation for 6D motion estimation and mapping with a continuously rotating 3D laser scanner , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2014.
[] Efficient deformable registration of multi-resolution surfel maps for object manipulation skill transfer , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2014.
[] Combining the Strengths of Sparse Interest Point and Dense Image Registration for RGB-D Odometry , In Proc. of the Joint 45th International Symposium on Robotics (ISR) and 8th German Conference on Robotics (ROBOTIK), 2014.
[] Local Multi-Resolution Surfel Grids for MAV Motion Estimation and 3D Mapping , In Proc. of the 13th International Conference on Intelligent Autonomous Systems (IAS), 2014.
[] Adaptive Tool-Use Strategies for Anthropomorphic Service Robots , In Proc. of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2014.
2013
[] Mobile bin picking with an anthropomorphic service robot , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2013.
[] Hierarchical Object Discovery and Dense Modelling From Motion Cues in RGB-D Video , In Proc. of the 23rd International Joint Conference on Artificial Intelligence (IJCAI), IJCAI/AAAI, 2013.
[] Combining contour and shape primitives for object detection and pose estimation of prefabricated parts , In Proc. of the 20th IEEE International Conference on Image Processing (ICIP), 2013.
[] Distinctive 3D surface entropy features for place recognition. , In Proc. of the European Conference on Mobile Robots (ECMR), IEEE, 2013.
[] Joint detection and pose tracking of multi-resolution surfel models in RGB-D , In Proc. of the European Conference on Mobile Robots (ECMR), IEEE, 2013.
[] Efficient Dense 3D Rigid-Body Motion Segmentation in RGB-D Video , In Proc. of the British Machine Vision Conference (BMVC), 2013.
[] Multi-resolution surfel mapping and real-time pose tracking using a continuously rotating 2D laser scanner , In Proc. of the IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), 2013.
2012
[] Robust Real-Time Registration of RGB-D Images using Multi-Resolution Surfel Representations , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Efficient Mobile Robot Navigation using 3D Surfel Grid Maps , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Shape-Primitive Based Object Recognition and Grasping , In Proc. of ROBOTIK, VDE-Verlag, 2012.
[] Model Learning and Real-Time Tracking Using Multi-Resolution Surfel Maps , In , 2012.
[] Adaptive Multi-cue 3D Tracking of Arbitrary Objects , In DAGM/OAGM Symposium (A Pinz, T Pock, H Bischof, F Leberl, eds.), Springer, volume 7476, 2012.
[] SURE: Surface Entropy for Distinctive 3D Features , In Proc. of Spatial Cognition, 2012.
[] Adjustable autonomy for mobile teleoperation of personal service robots , In Proc. of the IEEE Int. Symp. on Robot and Human Interactive Communication, 2012.
[] Integrating depth and color cues for dense multi-resolution scene mapping using RGB-D cameras , In Proc. of the IEEE Int. Conf. on Multisensor Fusion and Integration for Intelligent Systems (MFI), 2012.
[] Semantic mapping using object-class segmentation of RGB-D images , In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2012.
[] Bayesian calibration of the hand-eye kinematics of an anthropomorphic robot , In Proc. of the 12th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2012.
2011
[] Learning to Interpret Pointing Gestures with a Time-of-flight Camera , In Proceedings of the 6th International Conference on Human-robot Interaction, Advances in Computational Mathematics, 2011.
[] Interest point detection in depth images through scale-space surface analysis , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] Towards joint attention for a domestic service robot - person awareness and gesture recognition using Time-of-Flight cameras , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2011.
[] Compliant Task-Space Control with Back-Drivable Servo Actuators , In RoboCup (T Röfer, NM Mayer, J Savage, U Saranli, eds.), Springer, volume 7416, 2011.
[] Real-Time 3D Perception and Efficient Grasp Planning for Everyday Manipulation Tasks. , In Proc. of the European Conf. on Mobile Robots (ECMR), 2011.
[] Following human guidance to cooperatively carry a large object , In Proc. of the 11th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2011.
[] Efficient Multi-resolution Plane Segmentation of 3D Point Clouds , In Proc. of the Int. Conf. on Intelligent Robotics and Applications (ICIRA) (S Jeschke, H Liu, D Schilberg, eds.), Springer Berlin Heidelberg, volume 7102, 2011.
2010
[] Using Time-of-Flight cameras with active gaze control for 3D collision avoidance , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2010.
[] Improving indoor navigation of autonomous robots by an explicit representation of doors , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2010.
[] Intuitive Multimodal Interaction for Domestic Service Robots , In Proc. of the ISR/ROBOTIK, VDE Verlag, 2010.
[] Learning Motion Skills from Expert Demonstrations and Own Experience using Gaussian Process Regression , In Proc. of the ISR/ROBOTIK, VDE Verlag, 2010.
[] Utilizing the Structure of Field Lines for Efficient Soccer Robot Localization , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Towards Semantic Scene Analysis with Time-of-flight Cameras , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Improving People Awareness of Service Robots by Semantic Scene Knowledge , In RobuCup (JR del Solar, E Chown, PG Plöger, eds.), Springer, volume 6556, 2010.
[] Combining depth and color cues for scale- and viewpoint-invariant object segmentation and recognition using Random Forests , In Proc. of the IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), 2010.
[] Improving imitated grasping motions through interactive expected deviation learning , In Proc. of the 10th IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2010.
2009
[] Dynamaid, an Anthropomorphic Robot for Research on Domestic Service Applications , In Proc. of the European Conference on Mobile Robots (ECMR), 2009.
[] Integrating indoor mobility, object manipulation, and intuitive interaction for domestic service tasks , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2009.
2008
[] Orthogonal wall correction for visual motion estimation , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2008.
[] In-lane Localization in Road Networks using Curbs Detected in Omnidirectional Height Images , In Proceedings of Robotik 2008, 2008.
2007
[] Hierarchical reactive control for a team of humanoid soccer robots , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2007.
2006
[] See, walk, and kick: Humanoid robots start to play soccer , In Proc. of the IEEE-RAS Int. Conf. on Humanoid Robots (Humanoids), 2006.
Book Chapters | Journal Articles | Conference and Workshop Papers | PhD Thesis
PhD Thesis
2014
[] Efficient Dense Registration, Segmentation, and Modeling Methods for RGB-D Environment Perception , PhD thesis, Faculty of Mathematics and Natural Sciences, University of Bonn, Germany, 2014.


