Research Interests
RGB-D SLAM, 3D Dense Reconstruction, Deep Learning
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2018
[] 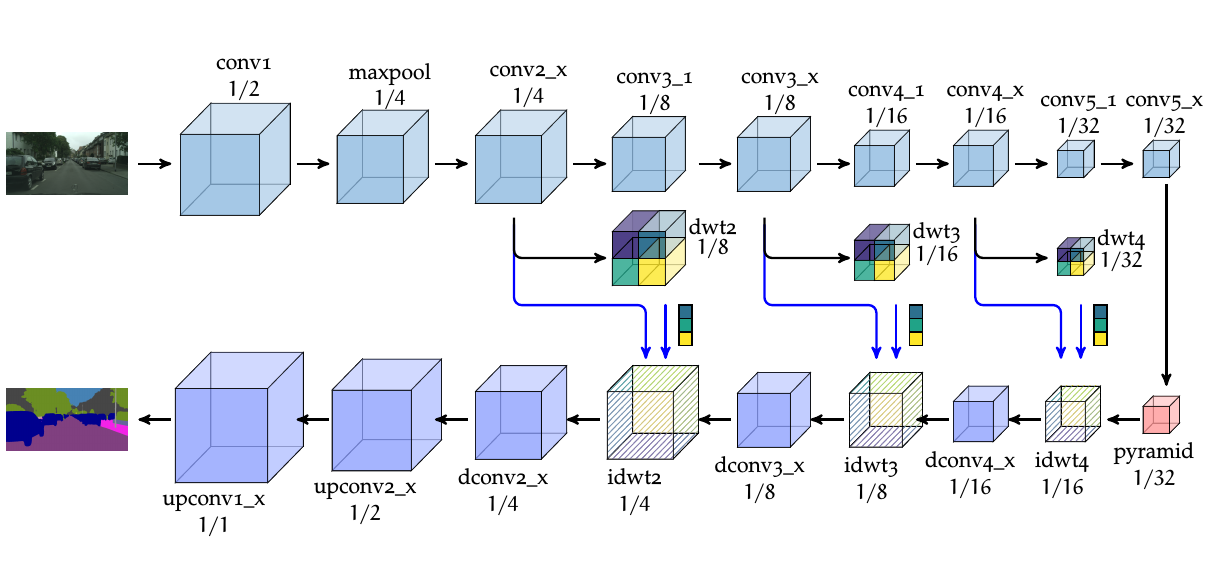
Detailed Dense Inference with Convolutional Neural Networks via Discrete Wavelet Transform , In , 2018. ([arxiv])
2015
[] 
Incremental and Batch Planar Simplification of Dense Point Cloud Maps , In Robotics and Autonomous Systems (RAS) ECMR '13 Special Issue, North-Holland Publishing Co., volume 69, 2015.
Conference and Workshop Papers
2017
[] 
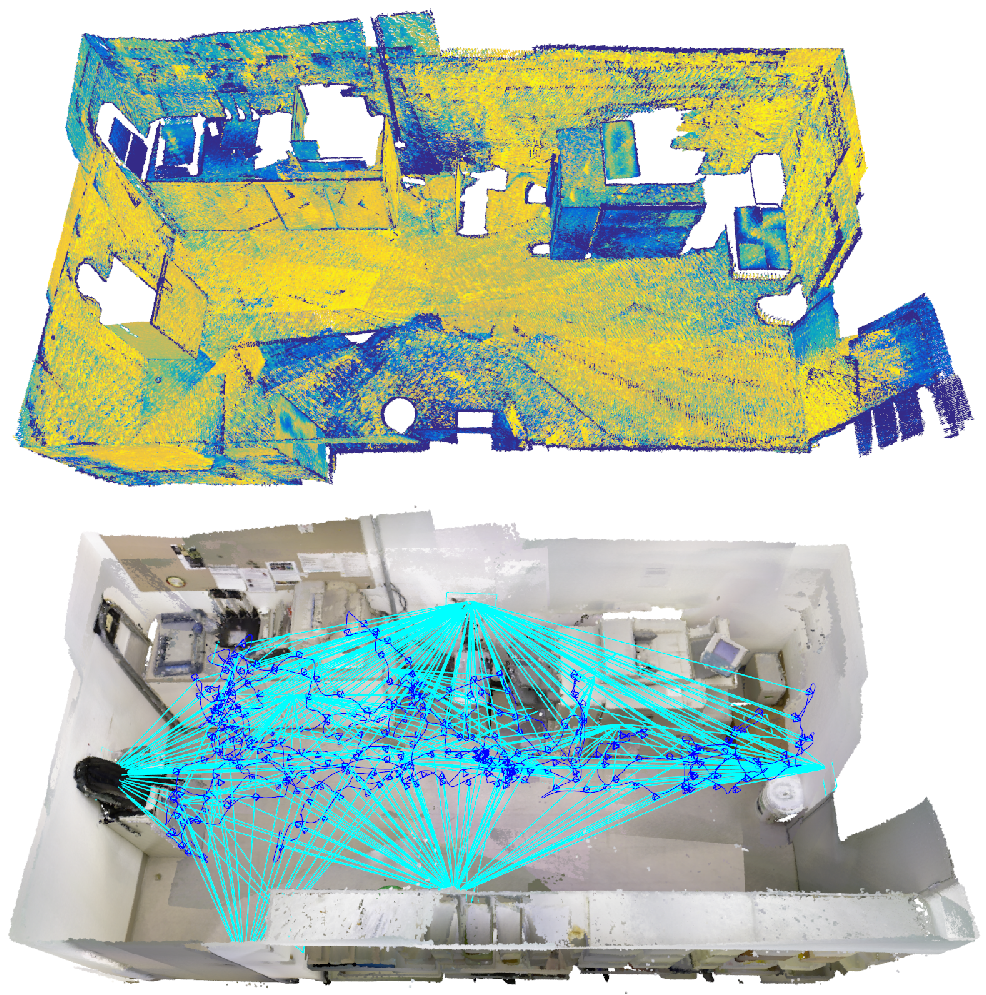
De-noising, Stabilizing and Completing 3D Reconstructions On-the-go using Plane Priors , In International Conference on Robotics and Automation (ICRA), 2017. ([video])
[] 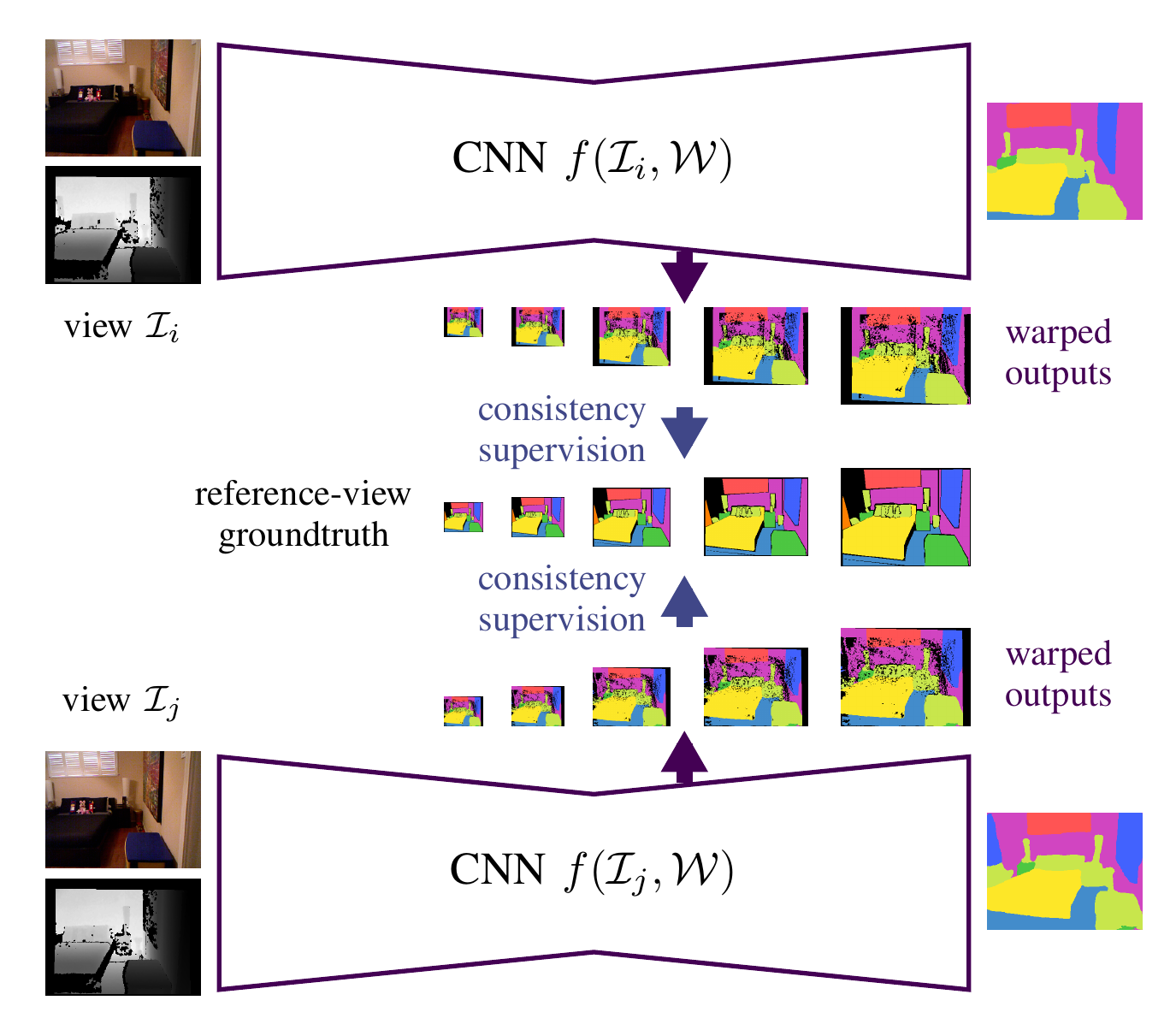
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2017.
2016
[] 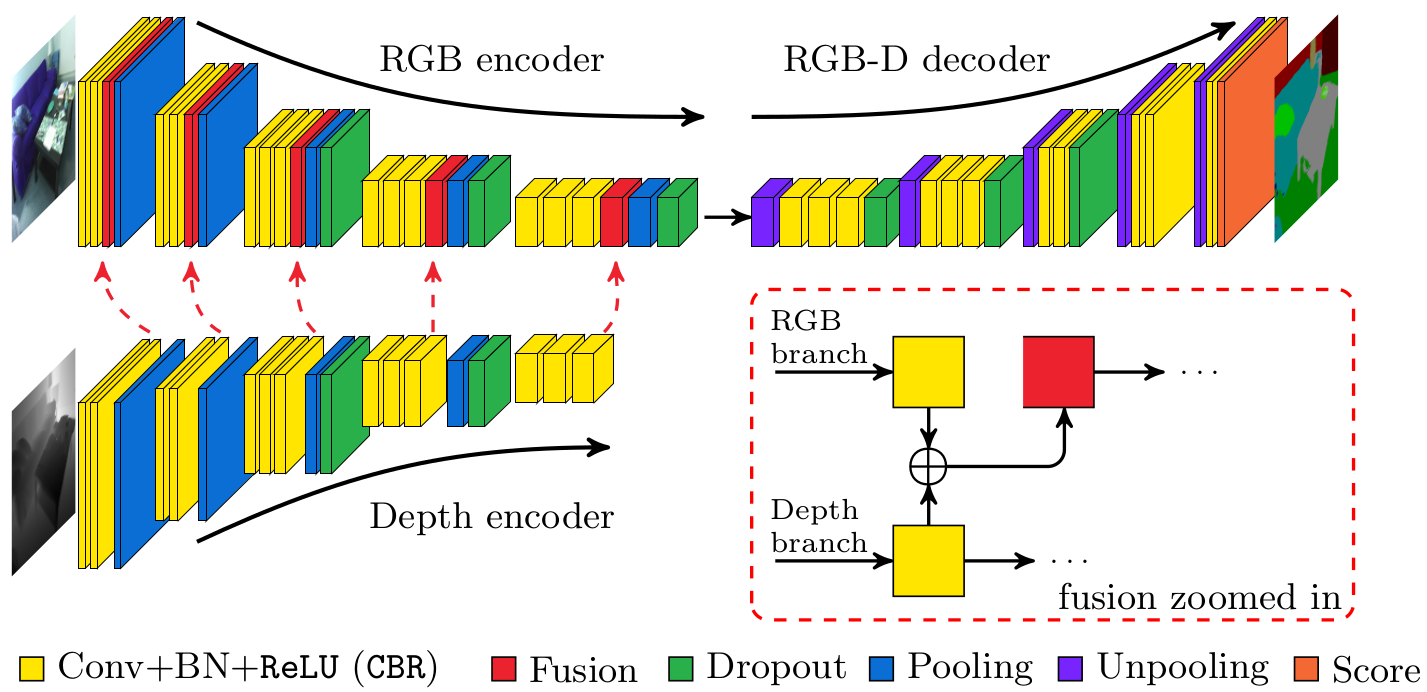
FuseNet: Incorporating Depth into Semantic Segmentation via Fusion-based CNN Architecture , In Asian Conference on Computer Vision, 2016. ([code])
[] 
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM , In International Conference on Robotics and Automation (ICRA), 2016.
2013
[] 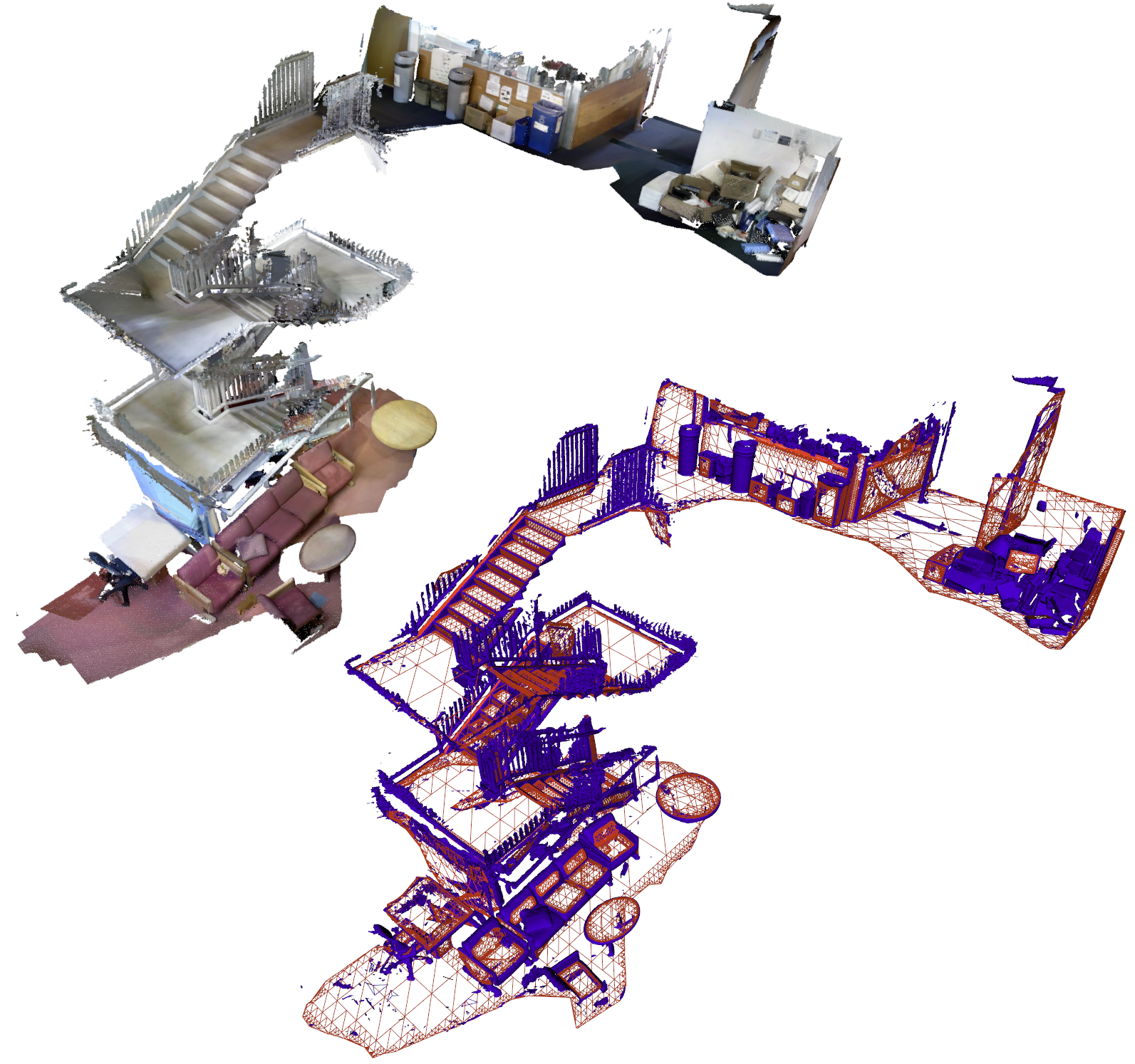
Planar simplification and texturing of dense point cloud maps , In Mobile Robots (ECMR), 2013 European Conference on, 2013.
Teaching
Summer Semester 2016
Lecture
- Probabilistic Graphical Models in Computer Vision (2h + 2h / 5 ECTS)
Practical Course
- Machine Learning for Applications in Computer Vision (6h / 10 ECTS)
Winter Semester 2015/16
Practical Course
- GPU Programming in Computer Vision (6h / 10 ECTS)


