Contact: Martin Oswald, Eno Toeppe, Jörg Stückler, Prof. Dr. Daniel Cremers
The estimation of 3D geometry from a single image is a special case of image-based 3D reconstruction from several images,
but is considerably more difficult since depth cannot be estimated from pixel correspondences. Thus, further prior knowledge or user input is needed in order to recover or infer any depth information.
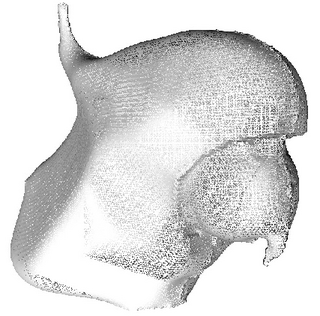
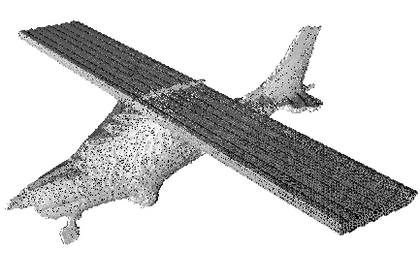
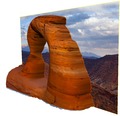
By assuming plane symmetry and surface smoothness, depth information can be inferred from an image silhouette by specifying only the volume of the object.
In order to allow for surface creases, the user is able to alter the surface smoothness locally.
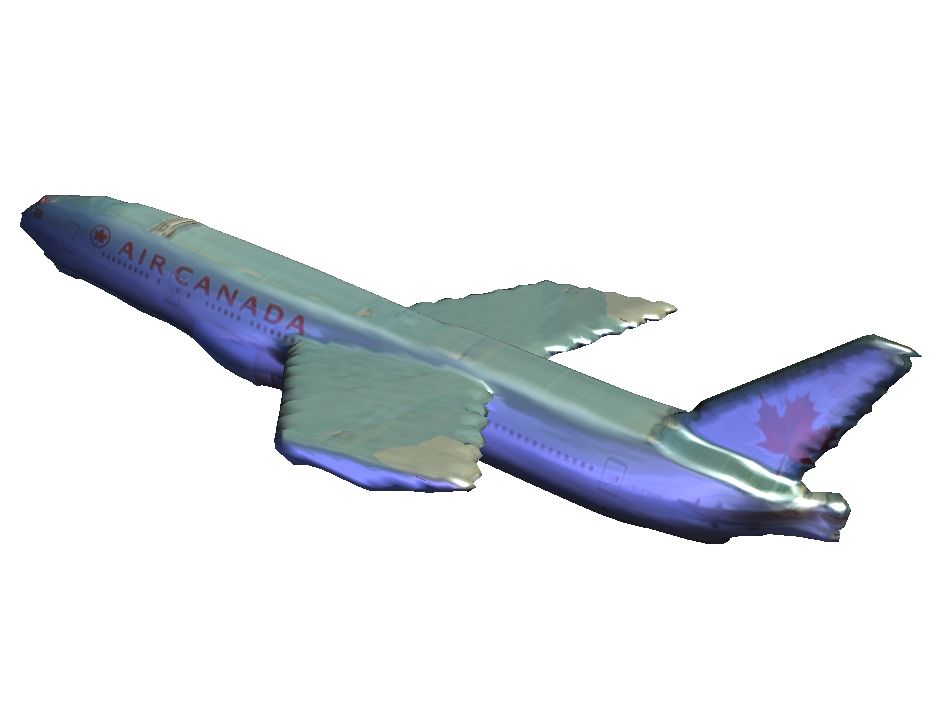
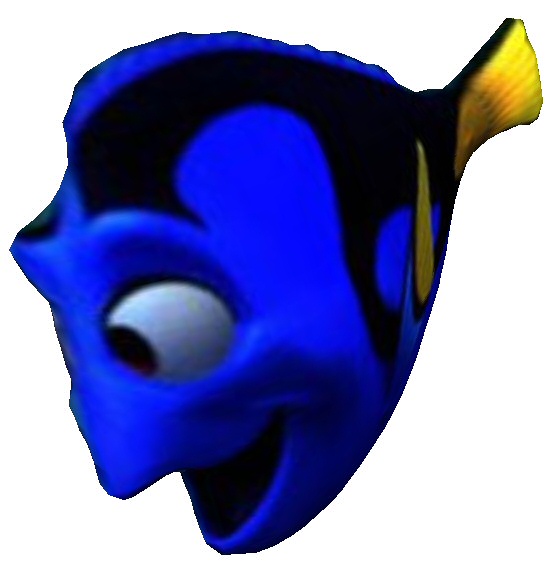
By changing a single parameter - the object volume - depth information can be inferred with a minimum of user interaction.
The following video shows results of our method which uses a heightmap representation of the surface (see CVPR'12 publication for details).
Export as PDF, XML, TEX or BIB
|
| Conference and Workshop Papers
|
| 2013
|
| [] |  | Volume Constraints for Single View Reconstruction (E. Toeppe, C. Nieuwenhuis and D. Cremers), In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2013.
|
| 2012
|
| [] |  | Fast and Globally Optimal Single View Reconstruction of Curved Objects (M. R. Oswald, E. Toeppe and D. Cremers), In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2012.
|
| 2011
|
| [] |  | A Survey on Geometry Recovery from a Single Image with Focus on Curved Object Reconstruction (M. R. Oswald, E. Toeppe, C. Nieuwenhuis and D. Cremers), In Proceedings of the 2011 Conference on Innovations for Shape Analysis: Models and Algorithms, Springer-Verlag, 2011.
|
| [] |  | Silhouette-Based Variational Methods for Single View Reconstruction (E. Toeppe, M. R. Oswald, D. Cremers and C. Rother), In Proceedings of the 2010 international conference on Video Processing and Computational Video (D. Cremers, M. A. Magnor, M. R. Oswald, L. Zelnik-Manor, eds.), Springer-Verlag, 2011.
|
| 2010
|
| [] |  | Image-based 3D Modeling via Cheeger Sets (E. Toeppe, M. R. Oswald, D. Cremers and C. Rother), In Asian Conference on Computer Vision, 2010.
Received Honorable Mention Award |
| 2009
|
| [] |  | Non-Parametric Single View Reconstruction of Curved Objects using Convex Optimization (M. R. Oswald, E. Toeppe, K. Kolev and D. Cremers), In Pattern Recognition (Proc. DAGM), 2009.
Received a DAGM Paper Award |