Dataset Download
We recommend that you use the 'xyz' series for your first experiments. The motion is relatively small, and only a small volume on an office desk is covered. Once this works, you might want to try the 'desk' dataset, which covers four tables and contains several loop closures.
We are happy to share our data with other researchers. Please refer to the respective publication when using this data.
Remarks:
- The file formats are described here.
- The intrinsic camera parameters are here.
- We provide a set of useful tools for working with the dataset.
- The
*_validationsequences do not contain ground truth. They can only evaluated using the online tool.
More Information
Testing and Debugging
 |
Sequence 'freiburg1_xyz' For this sequence, the Kinect was pointed at a typical desk in an office environment. This sequence contains only translatory motions along the principal axes of the Kinect, while the orientation was kept (mostly) fixed. This sequence is well suited for debugging purposes, as it is very simple. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.42GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 30.09s Duration with ground-truth: 30.00s Ground-truth trajectory length: 7.112m Avg. translational velocity: 0.244m/s Avg. angular velocity: 8.920deg/s Trajectory dim.: 0.46m x 0.70m x 0.44m Last modified: 30 Sep 2011, 15:16 |
 |
Sequence 'freiburg1_rpy' For this sequence, the Kinect was pointed at a typical desk in an office environment. While we kept the position fixed, we rotated the Kinect along all three principal axes (RPY=roll-pitch-yaw). This sequence is well suited for debugging purposes, i.e., to check whether orientation estimation/tracking works. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.38GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 27.67s Duration with ground-truth: 27.42s Ground-truth trajectory length: 1.664m Avg. translational velocity: 0.062m/s Avg. angular velocity: 50.147deg/s Trajectory dim.: 0.15m x 0.21m x 0.21m Last modified: 30 Sep 2011, 15:16 |
 |
Sequence 'freiburg2_xyz' This sequence contains very clean data for debugging translations. The Kinect was moved along the principal axes in x-, y- and z-direction very slowly. The slow camera motion basically ensures that there is (almost) no motion blur and rolling shutter effects in the data. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.05GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 122.74s Duration with ground-truth: 121.48s Ground-truth trajectory length: 7.029m Avg. translational velocity: 0.058m/s Avg. angular velocity: 1.716deg/s Trajectory dim.: 1.30m x 0.96m x 0.72m Last modified: 30 Sep 2011, 15:24 |
 |
Sequence 'freiburg2_rpy' This sequence contains very clean data for debugging rotations. The Kinect was turned around the principal axes very slowly on the spot (RPY stands for roll-pitch-yaw). The slow camera motion basically ensures that there is (almost) no motion blur and rolling shutter effects in the data. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.91GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 109.97s Duration with ground-truth: 108.86s Ground-truth trajectory length: 1.506m Avg. translational velocity: 0.014m/s Avg. angular velocity: 5.774deg/s Trajectory dim.: 0.21m x 0.22m x 0.11m Last modified: 30 Sep 2011, 15:23 |
Handheld SLAM
 |
Sequence 'freiburg1_360' This sequence contains a 360 degree turn in a typical office environment. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.39GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 28.69s Duration with ground-truth: 28.70s Ground-truth trajectory length: 5.818m Avg. translational velocity: 0.210m/s Avg. angular velocity: 41.600deg/s Trajectory dim.: 0.54m x 0.46m x 0.47m Last modified: 30 Sep 2011, 15:14 |
 |
Sequence 'freiburg1_floor' A simple sweep over the wooden floor in the office. The floor contains several knotholes which are easy to track using visual feature detectors like SIFT or SURF. Furthermore, most of the scene (the floor) is planar, except for an office chair that gets visible after a while. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.68GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 49.87s Duration with ground-truth: 44.27s Ground-truth trajectory length: 12.569m Avg. translational velocity: 0.258m/s Avg. angular velocity: 15.071deg/s Trajectory dim.: 2.30m x 1.31m x 0.58m Last modified: 30 Sep 2011, 15:14 |
 |
Sequence 'freiburg1_desk' This sequence contains several sweeps over four desks in a typical office environment (there is also a second sequence available called desk2 from the same four desks). |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.32GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 23.40s Duration with ground-truth: 23.35s Ground-truth trajectory length: 9.263m Avg. translational velocity: 0.413m/s Avg. angular velocity: 23.327deg/s Trajectory dim.: 2.42m x 1.34m x 0.66m Last modified: 30 Sep 2011, 15:14 |
 |
Sequence 'freiburg1_desk2' This sequence contains several sweeps over four desks in a typical office environment (similar to desk, but second recording). |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.33GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 24.86s Duration with ground-truth: 24.28s Ground-truth trajectory length: 10.161m Avg. translational velocity: 0.426m/s Avg. angular velocity: 29.308deg/s Trajectory dim.: 2.44m x 1.47m x 0.52m Last modified: 30 Sep 2011, 15:14 |
 |
Sequence 'freiburg1_room' For this sequence we filmed along a trajectory through the whole office. It starts with the four desks (see desk and desk2 sequence) but continues around the (outer) wall of the room until the loop is closed. This sequence is well suited for evaluating how well a SLAM system can cope with loop-closures. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.73GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 48.90s Duration with ground-truth: 48.87s Ground-truth trajectory length: 15.989m Avg. translational velocity: 0.334m/s Avg. angular velocity: 29.882deg/s Trajectory dim.: 2.54m x 2.21m x 0.51m Last modified: 30 Sep 2011, 15:15 |
 |
Sequence 'freiburg2_360_hemisphere' For this sequence, we stood in the middle of the hall and rotated the Kinect horizontally around 360 degrees and afterwards also pointed it towards the ceiling. There should be almost no translation. The result is a 360degree hemisphere of the hall. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.38GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 91.48s Duration with ground-truth: 89.67s Ground-truth trajectory length: 14.773m Avg. translational velocity: 0.163m/s Avg. angular velocity: 20.569deg/s Trajectory dim.: 3.06m x 3.48m x 0.58m Last modified: 30 Sep 2011, 15:15 |
 |
Sequence 'freiburg2_360_kidnap' This sequence is similar to the 360_hemisphere one, except that we covered the cameras of the Kinect several times while we pointed the Kinect to a different location ("kidnap") for testing algorithms that can recover from tracking problems. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.68GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 48.04s Duration with ground-truth: 47.49s Ground-truth trajectory length: 14.286m Avg. translational velocity: 0.304m/s Avg. angular velocity: 13.425deg/s Trajectory dim.: 4.26m x 3.44m x 0.12m Last modified: 30 Sep 2011, 15:15 |
 |
Sequence 'freiburg2_desk' For this sequence we recorded a typical office scene with two desks, a computer monitor, keyboard, phone, chairs, etc. The Kinect is moved around the two tables so that the loop is closed. A similar sequence is available in freiburg2_person, where additionally a person was sitting at one of the desks who moved various objects during the recording. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.76GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 99.36s Duration with ground-truth: 69.15s Ground-truth trajectory length: 18.880m Avg. translational velocity: 0.193m/s Avg. angular velocity: 6.338deg/s Trajectory dim.: 3.90m x 4.13m x 0.57m Last modified: 30 Sep 2011, 15:17 |
 |
Sequence 'freiburg2_large_no_loop' This is a very long trajectory through the industrial hall. We did not close the loop in the end, therefore this sequence can be used to verify the accumulative drift of a SLAM system. A similar sequence with a loop closure is available in large_with_loop. Note that as the mo-cap system only covers the begin and the end of the trajectory, there is no ground-truth information for the middle part. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.77GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 112.37s Duration with ground-truth: 21.37s Ground-truth trajectory length: 26.086m Avg. translational velocity: 0.243m/s Avg. angular velocity: 15.090deg/s Trajectory dim.: 3.63m x 5.07m x 0.20m Last modified: 30 Sep 2011, 15:19 |
 |
Sequence 'freiburg2_large_with_loop' This is a very long trajectory through the industrial hall. At the end of the trajectory, there is a significant overlap of the images with the beginning of the trajectory, so the loop can be closed. Note that as the mo-cap system only covers the begin and the end of the trajectory, there is no ground-truth information for the middle part. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.66GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 173.19s Duration with ground-truth: 40.54s Ground-truth trajectory length: 39.111m Avg. translational velocity: 0.231m/s Avg. angular velocity: 17.211deg/s Trajectory dim.: 3.39m x 4.26m x 0.53m Last modified: 30 Sep 2011, 15:20 |
 |
Sequence 'freiburg3_long_office_household' The Asus Xtion sensor was moved along a large round through a household and office scene with much texture and structure. The end of the trajectory overlaps with the beginning so that there is a large loop closure. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.38GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 87.09s Duration with ground-truth: 87.10s Ground-truth trajectory length: 21.455m Avg. translational velocity: 0.249m/s Avg. angular velocity: 10.188deg/s Trajectory dim.: 5.12m x 4.89m x 0.54m Last modified: 07 Aug 2012, 18:51 |
Robot SLAM
 |
Sequence 'freiburg2_pioneer_360' This sequence was recorded from a Kinect mounted on top of a Pioneer robot. The Pioneer was joysticked on the spot for a (more than) 360-degree turn. The bag files contain additionally the laser scan and the odometry data of the robot. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.62GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 72.75s Duration with ground-truth: 72.00s Ground-truth trajectory length: 16.118m Avg. translational velocity: 0.225m/s Avg. angular velocity: 12.053deg/s Trajectory dim.: 4.24m x 4.38m x 0.06m Last modified: 30 Sep 2011, 15:21 |
 |
Sequence 'freiburg2_pioneer_slam' This sequence was recorded from a Kinect mounted on top of a Pioneer robot. The Pioneer was joysticked through a maze of tables, containers and other walls, so that several loops have been closed for map building. The bag files contain additionally the laser scan and the odometry data of the robot. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.51GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 155.72s Duration with ground-truth: 145.86s Ground-truth trajectory length: 40.380m Avg. translational velocity: 0.261m/s Avg. angular velocity: 13.379deg/s Trajectory dim.: 5.50m x 5.94m x 0.07m Last modified: 30 Sep 2011, 15:22 |
 |
Sequence 'freiburg2_pioneer_slam2' This sequence was recorded from a Kinect mounted on top of a Pioneer robot. The Pioneer was joysticked through a large hall. The bag files contain additionally the laser scan and the odometry data of the robot. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.10GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 115.63s Duration with ground-truth: 109.49s Ground-truth trajectory length: 21.735m Avg. translational velocity: 0.190m/s Avg. angular velocity: 12.209deg/s Trajectory dim.: 4.98m x 5.34m x 0.07m Last modified: 30 Sep 2011, 15:21 |
 |
Sequence 'freiburg2_pioneer_slam3' This sequence was recorded from a Kinect mounted on top of a Pioneer robot. The Pioneer was joysticked through a large hall. The bag files contain additionally the laser scan and the odometry data of the robot. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.34GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 111.91s Duration with ground-truth: 105.04s Ground-truth trajectory length: 18.135m Avg. translational velocity: 0.164m/s Avg. angular velocity: 12.339deg/s Trajectory dim.: 5.29m x 5.25m x 0.07m Last modified: 30 Sep 2011, 15:22 |
Structure vs. Texture
 |
Sequence 'freiburg3_nostructure_notexture_far' The Asus Xtion sensor was moved in approximately two meters height along a planar, wooden surface. This recording has intentionally little to no visible structure and texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.18GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 15.79s Duration with ground-truth: 15.80s Ground-truth trajectory length: 2.897m Avg. translational velocity: 0.196m/s Avg. angular velocity: 2.712deg/s Trajectory dim.: 0.24m x 2.95m x 0.05m Last modified: 07 Aug 2012, 18:59 |
 |
Sequence 'freiburg3_nostructure_notexture_near_withloop' The Asus Xtion sensor was moved in approximately one meter height along a planar, wooden surface of approximately 3m x 3m. This recording has intentionally little to no visible structure and texture. The beginning and the end of the sequence overlaps, i.e., there is a loop closure. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.45GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 37.74s Duration with ground-truth: 37.72s Ground-truth trajectory length: 11.739m Avg. translational velocity: 0.319m/s Avg. angular velocity: 11.241deg/s Trajectory dim.: 2.98m x 3.65m x 0.34m Last modified: 07 Aug 2012, 18:57 |
 |
Sequence 'freiburg3_nostructure_texture_far' The Asus Xtion has been moved in two meters height along a textured, planar surface. The texture is highly discriminative as it consists of several conference posters. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.20GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 15.53s Duration with ground-truth: 15.54s Ground-truth trajectory length: 4.343m Avg. translational velocity: 0.299m/s Avg. angular velocity: 2.890deg/s Trajectory dim.: 0.12m x 4.33m x 0.09m Last modified: 07 Aug 2012, 18:54 |
 |
Sequence 'freiburg3_nostructure_texture_near_withloop' The Asus Xtion has been moved in one meter height in a circle a textured, planar surface. The texture is highly discriminative as it consists of several conference posters. The beginning and the end of the trajectory overlap, so that there is a loop closure. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.73GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 56.48s Duration with ground-truth: 56.49s Ground-truth trajectory length: 13.456m Avg. translational velocity: 0.242m/s Avg. angular velocity: 7.430deg/s Trajectory dim.: 3.66m x 4.79m x 0.32m Last modified: 07 Aug 2012, 19:04 |
 |
Sequence 'freiburg3_structure_notexture_far' The Asus Xtion was moved in one meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a white plastic foil with little to no texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.31GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 27.28s Duration with ground-truth: 27.29s Ground-truth trajectory length: 4.353m Avg. translational velocity: 0.166m/s Avg. angular velocity: 4.000deg/s Trajectory dim.: 0.87m x 3.89m x 0.06m Last modified: 07 Aug 2012, 18:57 |
 |
Sequence 'freiburg3_structure_notexture_near' The Asus Xtion was moved in half a meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a white plastic foil with little to no texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.40GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 36.44s Duration with ground-truth: 36.45s Ground-truth trajectory length: 3.872m Avg. translational velocity: 0.109m/s Avg. angular velocity: 6.247deg/s Trajectory dim.: 0.53m x 3.39m x 0.18m Last modified: 07 Aug 2012, 19:03 |
 |
Sequence 'freiburg3_structure_texture_far' The Asus Xtion was moved in one meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a colorful plastic foil with strong texture. The floor in front of the object has been covered with several posters which have also a strong texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.49GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 31.55s Duration with ground-truth: 31.56s Ground-truth trajectory length: 5.884m Avg. translational velocity: 0.193m/s Avg. angular velocity: 4.323deg/s Trajectory dim.: 1.90m x 4.56m x 0.08m Last modified: 07 Aug 2012, 18:55 |
 |
Sequence 'freiburg3_structure_texture_near' The Asus Xtion was moved in half a meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a colorful plastic foil with strong texture. The floor in front of the object has been covered with several posters which have also a strong texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.53GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 36.91s Duration with ground-truth: 36.92s Ground-truth trajectory length: 5.050m Avg. translational velocity: 0.141m/s Avg. angular velocity: 7.677deg/s Trajectory dim.: 1.01m x 4.01m x 0.17m Last modified: 07 Aug 2012, 19:02 |
Dynamic Objects
 |
Sequence 'freiburg2_desk_with_person' For this sequence, we recorded a typical office scene with a person sitting at a desk. During the recording the person moved and interacted with some of the objects (screen, phone, ..). This sequence is intended for checking the robustness of a SLAM system against dynamic objects and persons, but it can also be used for differencing maps and finding changes in the scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.38GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 142.08s Duration with ground-truth: 119.37s Ground-truth trajectory length: 17.044m Avg. translational velocity: 0.121m/s Avg. angular velocity: 5.340deg/s Trajectory dim.: 2.30m x 3.93m x 0.51m Last modified: 30 Sep 2011, 15:17 |
 |
Sequence 'freiburg3_sitting_static' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has been kept in place manually. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.41GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 23.63s Duration with ground-truth: 23.64s Ground-truth trajectory length: 0.259m Avg. translational velocity: 0.011m/s Avg. angular velocity: 1.699deg/s Trajectory dim.: 0.12m x 0.08m x 0.05m Last modified: 07 Aug 2012, 18:50 |
 |
Sequence 'freiburg3_sitting_xyz' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has manually been moved along three directions (xyz) while keeping the same orientation. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.72GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 42.50s Duration with ground-truth: 42.51s Ground-truth trajectory length: 5.496m Avg. translational velocity: 0.132m/s Avg. angular velocity: 3.562deg/s Trajectory dim.: 0.99m x 0.93m x 1.02m Last modified: 07 Aug 2012, 19:03 |
 |
Sequence 'freiburg3_sitting_halfsphere' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has been moved on a small half sphere of approximately one meter diameter. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.61GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 37.15s Duration with ground-truth: 37.16s Ground-truth trajectory length: 6.503m Avg. translational velocity: 0.180m/s Avg. angular velocity: 19.094deg/s Trajectory dim.: 1.46m x 0.88m x 1.19m Last modified: 07 Aug 2012, 18:52 |
 |
Sequence 'freiburg3_sitting_rpy' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has been rotated along the principal axes (roll-pitch-yaw) at the same position. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.45GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 27.48s Duration with ground-truth: 27.49s Ground-truth trajectory length: 1.110m Avg. translational velocity: 0.042m/s Avg. angular velocity: 23.841deg/s Trajectory dim.: 0.18m x 0.12m x 0.20m Last modified: 07 Aug 2012, 18:57 |
 |
Sequence 'freiburg3_walking_static' Two persons walk through an office scene. The Asus Xtion sensor has been kept in place manually. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.44GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 24.83s Duration with ground-truth: 24.83s Ground-truth trajectory length: 0.282m Avg. translational velocity: 0.012m/s Avg. angular velocity: 1.388deg/s Trajectory dim.: 0.10m x 0.05m x 0.05m Last modified: 07 Aug 2012, 18:59 |
 |
Sequence 'freiburg3_walking_xyz' Two persons walk through an office scene. The Asus Xtion sensor has manually been moved along three directions (xyz) while keeping the same orientation. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.49GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 28.83s Duration with ground-truth: 28.84s Ground-truth trajectory length: 5.791m Avg. translational velocity: 0.208m/s Avg. angular velocity: 5.490deg/s Trajectory dim.: 0.94m x 0.82m x 1.15m Last modified: 07 Aug 2012, 18:50 |
 |
Sequence 'freiburg3_walking_halfsphere' Two persons walk through an office scene. The Asus Xtion sensor has been moved on a small half sphere of approximately one meter diameter. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.60GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 35.81s Duration with ground-truth: 35.82s Ground-truth trajectory length: 7.686m Avg. translational velocity: 0.221m/s Avg. angular velocity: 18.267deg/s Trajectory dim.: 1.83m x 0.83m x 1.31m Last modified: 07 Aug 2012, 19:00 |
 |
Sequence 'freiburg3_walking_rpy' Two persons walk through an office scene. The Asus Xtion sensor has been rotated along the principal axes (roll-pitch-yaw) at the same position. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.50GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 30.61s Duration with ground-truth: 30.62s Ground-truth trajectory length: 2.698m Avg. translational velocity: 0.091m/s Avg. angular velocity: 20.903deg/s Trajectory dim.: 0.79m x 0.47m x 0.14m Last modified: 07 Aug 2012, 18:56 |
3D Object Reconstruction
 |
Sequence 'freiburg1_plant' This sequence contains a plant that was filmed from different positions and orientations. In total, we did a full 360 degree walk around the plant. This sequence is also suited for people interested in 3D reconstruction of objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.65GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 41.53s Duration with ground-truth: 41.24s Ground-truth trajectory length: 14.795m Avg. translational velocity: 0.365m/s Avg. angular velocity: 27.891deg/s Trajectory dim.: 1.71m x 1.70m x 1.07m Last modified: 30 Sep 2011, 15:15 |
 |
Sequence 'freiburg1_teddy' For this sequence, we recorded a huge teddy bear from different positions and orientations. This sequence is well suited for 3D object recognition. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.82GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 50.82s Duration with ground-truth: 50.78s Ground-truth trajectory length: 15.709m Avg. translational velocity: 0.315m/s Avg. angular velocity: 21.320deg/s Trajectory dim.: 2.42m x 2.24m x 1.43m Last modified: 30 Sep 2011, 15:16 |
 |
Sequence 'freiburg2_coke' This sequence contains different views of a Coke can (0.2l) standing on a table. This sequence is intended for 3D object reconstruction and object recognition. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.28GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 84.55s Duration with ground-truth: 83.71s Ground-truth trajectory length: 11.681m Avg. translational velocity: 0.140m/s Avg. angular velocity: 9.432deg/s Trajectory dim.: 1.60m x 2.02m x 0.73m Last modified: 30 Sep 2011, 15:16 |
 |
Sequence 'freiburg2_dishes' Kinect sequence of object reconstruction and object recognition. On the table, there were several pieces of silverware and dishes that we recorded from different perspectives. This sequence is well suited for learning object appearances from different viewpoints. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.41GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 100.55s Duration with ground-truth: 99.53s Ground-truth trajectory length: 15.009m Avg. translational velocity: 0.151m/s Avg. angular velocity: 9.666deg/s Trajectory dim.: 1.79m x 2.18m x 0.67m Last modified: 30 Sep 2011, 15:17 |
 |
Sequence 'freiburg2_flowerbouquet' This sequence contains a recording of a flower bouquet. It contains thin structures (the stems) as well as thicker ones (the blossoms and leafs). A second sequence with a brown carton background is available in freiburg2_blumen_brownbackground. This sequence is intended for 3D object reconstruction. Note that the depth image probably is incomplete in the vicinity of thin structures. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.58GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 99.40s Duration with ground-truth: 98.41s Ground-truth trajectory length: 10.758m Avg. translational velocity: 0.109m/s Avg. angular velocity: 8.464deg/s Trajectory dim.: 1.64m x 1.65m x 0.35m Last modified: 30 Sep 2011, 15:18 |
 |
Sequence 'freiburg2_flowerbouquet_brownbackground' This sequence contains a recording of a flower bouquet. It contains thin structures (the stems) as well as thicker ones (the blossoms and leafs). We used a brown carton for the background to simplify segmentation. A second sequence without a brown background is available in freiburg2_blumen. This sequence is intended for 3D object reconstruction. Note that the depth image probably is incomplete in the vicinity of thin structures. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.10GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 76.89s Duration with ground-truth: 76.12s Ground-truth trajectory length: 11.924m Avg. translational velocity: 0.157m/s Avg. angular velocity: 10.598deg/s Trajectory dim.: 1.76m x 1.99m x 0.70m Last modified: 30 Sep 2011, 15:18 |
 |
Sequence 'freiburg2_metallic_sphere' This sequence contains different views of a perfect metalic sphere laying on a table. This sequence is intended for 3D object reconstruction and object recognition. The diameter of the sphere is 150mm. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.16GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 75.60s Duration with ground-truth: 74.84s Ground-truth trajectory length: 11.040m Avg. translational velocity: 0.148m/s Avg. angular velocity: 10.422deg/s Trajectory dim.: 1.82m x 2.23m x 0.71m Last modified: 30 Sep 2011, 15:21 |
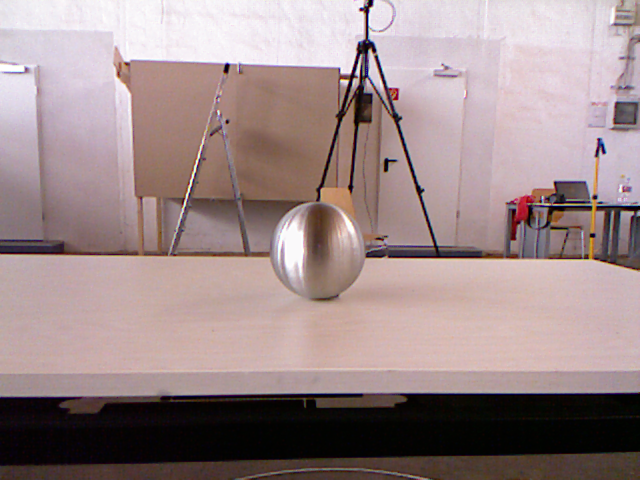 |
Sequence 'freiburg2_metallic_sphere2' This sequence contains different views of a perfect metalic sphere laying on a table. This sequence is intended for 3D object reconstruction and object recognition. The diameter of the sphere is 150mm. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.92GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 62.33s Duration with ground-truth: 61.58s Ground-truth trajectory length: 11.813m Avg. translational velocity: 0.193m/s Avg. angular velocity: 12.946deg/s Trajectory dim.: 1.74m x 1.97m x 0.77m Last modified: 30 Sep 2011, 15:20 |
 |
Sequence 'freiburg3_cabinet' The Asus Xtion is moved in a circle around an office pedestal. The pedestal has little texture and structure, but has rectangular corners and flat surfaces. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.47GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 38.58s Duration with ground-truth: 38.59s Ground-truth trajectory length: 8.111m Avg. translational velocity: 0.216m/s Avg. angular velocity: 10.248deg/s Trajectory dim.: 2.72m x 2.50m x 0.44m Last modified: 07 Aug 2012, 19:07 |
 |
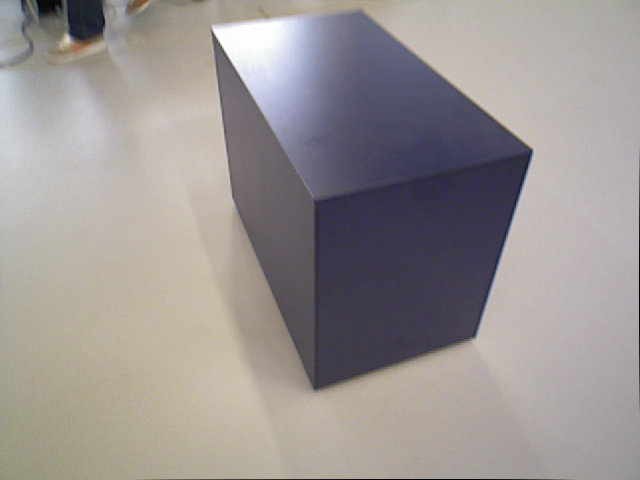
Sequence 'freiburg3_large_cabinet' The Asus Xtion sensor was moved in a circle around a large office cabinet. The cabinet has little texture and structure, but has mostly planar surfaces and right angles. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.46GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 33.98s Duration with ground-truth: 33.99s Ground-truth trajectory length: 11.954m Avg. translational velocity: 0.362m/s Avg. angular velocity: 8.747deg/s Trajectory dim.: 3.70m x 5.44m x 0.28m Last modified: 07 Aug 2012, 18:56 |
 |
Sequence 'freiburg3_teddy' The Asus Xtion sensor was moved around a teddy bear in two rounds at different heights. The teddy bear has a soft fur and wears a yellow, smooth shirt. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.16GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 80.79s Duration with ground-truth: 80.80s Ground-truth trajectory length: 19.807m Avg. translational velocity: 0.248m/s Avg. angular velocity: 20.410deg/s Trajectory dim.: 2.06m x 2.00m x 1.05m Last modified: 07 Aug 2012, 18:53 |
Validation Files (without public ground truth)
 |
Sequence 'freiburg1_xyz_validation' For this sequence, the Kinect was pointed at a typical desk in an office environment. This sequence contains only translatory motions along the principal axes of the Kinect, while the orientation was kept (mostly) fixed. This sequence is well suited for debugging purposes, as it is very simple. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.50GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 15:55 |
 |
Sequence 'freiburg1_rpy_validation' For this sequence, the Kinect was pointed at a typical desk in an office environment. While we kept the position fixed, we rotated the Kinect along all three principal axes (RPY=roll-pitch-yaw). This sequence is well suited for debugging purposes, i.e., to check whether orientation estimation/tracking works. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.50GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 16:23 |
 |
Sequence 'freiburg1_desk_validation' This sequence contains several sweeps over four desks in a typical office environment (there is also a second sequence available called desk2 from the same four desks). |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.59GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 16:57 |
 |
Sequence 'freiburg1_desk2_validation' This sequence contains several sweeps over four desks in a typical office environment (similar to desk, but second recording). |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.35GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 17:16 |
 |
Sequence 'freiburg1_360_validation' This sequence contains a 360 degree turn in a typical office environment. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.47GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 18:54 |
 |
Sequence 'freiburg1_room_validation' For this sequence we filmed along a trajectory through the whole office. It starts with the four desks (see desk and desk2 sequence) but continues around the (outer) wall of the room until the loop is closed. This sequence is well suited for evaluating how well a SLAM system can cope with loop-closures. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.25GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 18:27 |
 |
Sequence 'freiburg1_plant_validation' This sequence contains a plant that was filmed from different positions and orientations. In total, we did a full 360 degree walk around the plant. This sequence is also suited for people interested in 3D reconstruction of objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.71GB) RGB movie and depth movie |
Last modified: 20 Oct 2011, 10:31 |
 |
Sequence 'freiburg2_xyz_validation' This sequence contains very clean data for debugging translations. The Kinect was moved along the principal axes in x-, y- and z-direction very slowly. The slow camera motion basically ensures that there is (almost) no motion blur and rolling shutter effects in the data. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.08GB) RGB movie and depth movie |
Last modified: 20 Oct 2011, 02:06 |
 |
Sequence 'freiburg2_rpy_validation' This sequence contains very clean data for debugging rotations. The Kinect was turned around the principal axes very slowly on the spot (RPY stands for roll-pitch-yaw). The slow camera motion basically ensures that there is (almost) no motion blur and rolling shutter effects in the data. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.06GB) RGB movie and depth movie |
Last modified: 20 Oct 2011, 00:16 |
 |
Sequence 'freiburg2_360_hemisphere_validation' For this sequence, we stood in the middle of the hall and rotated the Kinect horizontally around 360 degrees and afterwards also pointed it towards the ceiling. There should be almost no translation. The result is a 360degree hemisphere of the hall. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.05GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 16:40 |
 |
Sequence 'freiburg2_360_kidnap_validation' This sequence is similar to the 360_hemisphere one, except that we covered the cameras of the Kinect several times while we pointed the Kinect to a different location ("kidnap") for testing algorithms that can recover from tracking problems. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.83GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 17:37 |
 |
Sequence 'freiburg2_desk_validation' For this sequence we recorded a typical office scene with two desks, a computer monitor, keyboard, phone, chairs, etc. The Kinect is moved around the two tables so that the loop is closed. A similar sequence is available in freiburg2_person, where additionally a person was sitting at one of the desks who moved various objects during the recording. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.01GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 19:27 |
 |
Sequence 'freiburg2_desk_with_person_validation' For this sequence, we recorded a typical office scene with a person sitting at a desk. During the recording the person moved and interacted with some of the objects (screen, phone, ..). This sequence is intended for checking the robustness of a SLAM system against dynamic objects and persons, but it can also be used for differencing maps and finding changes in the scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 2.34GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 21:16 |
 |
Sequence 'freiburg2_pioneer_360_validation' This sequence was recorded from a Kinect mounted on top of a Pioneer robot. The Pioneer was joysticked on the spot for a (more than) 360-degree turn. The bag files contain additionally the laser scan and the odometry data of the robot. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.06GB) RGB movie and depth movie |
Last modified: 19 Oct 2011, 22:31 |
 |
Sequence 'freiburg3_cabinet_validation' The Asus Xtion is moved in a circle around an office pedestal. The pedestal has little texture and structure, but has rectangular corners and flat surfaces. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.40GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:25 |
 |
Sequence 'freiburg3_large_cabinet_validation' The Asus Xtion sensor was moved in a circle around a large office cabinet. The cabinet has little texture and structure, but has mostly planar surfaces and right angles. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.49GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:25 |
 |
Sequence 'freiburg3_long_office_household_validation' The Asus Xtion sensor was moved along a large round through a household and office scene with much texture and structure. The end of the trajectory overlaps with the beginning so that there is a large loop closure. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.43GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_nostructure_notexture_far_validation' The Asus Xtion sensor was moved in approximately two meters height along a planar, wooden surface. This recording has intentionally little to no visible structure and texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.15GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_nostructure_notexture_near_withloop_validation' The Asus Xtion sensor was moved in approximately one meter height along a planar, wooden surface. This recording has intentionally little to no visible structure and texture. The beginning and the end of the sequence overlaps, i.e., there is a loop closure. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.44GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_nostructure_texture_far_validation' The Asus Xtion has been moved in two meters height along a textured, planar surface. The texture is highly discriminative as it consists of several conference posters. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.20GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_nostructure_texture_near_withloop_validation' The Asus Xtion has been moved in one meter height in a circle a textured, planar surface. The texture is highly discriminative as it consists of several conference posters. The beginning and the end of the trajectory overlap, so that there is a loop closure. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.81GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_structure_notexture_far_validation' The Asus Xtion was moved in one meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a white plastic foil with little to no texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.35GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_structure_notexture_near_validation' The Asus Xtion was moved in half a meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a white plastic foil with little to no texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.43GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
 |
Sequence 'freiburg3_structure_texture_far_validation' The Asus Xtion was moved in one meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a colorful plastic foil with strong texture. The floor in front of the object has been covered with several posters which have also a strong texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.41GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
 |
Sequence 'freiburg3_structure_texture_near_validation' The Asus Xtion was moved in half a meter height along a zig-zag structure built from wooden panels. The object is fully wrapped in a colorful plastic foil with strong texture. The floor in front of the object has been covered with several posters which have also a strong texture. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.50GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
 |
Sequence 'freiburg3_sitting_static_validation' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has been kept in place manually. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.41GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_sitting_xyz_validation' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has manually been moved along three directions (xyz) while keeping the same orientation. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.50GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_sitting_halfsphere_validation' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has been moved on a small half sphere of approximately one meter diameter. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.54GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_sitting_rpy_validation' Two persons sit at a desk, talk, and gesticulate a little bit. The Asus Xtion sensor has been rotated along the principal axes (roll-pitch-yaw) at the same position. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to slowly moving dynamic objects. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.43GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:26 |
 |
Sequence 'freiburg3_walking_static_validation' Two persons walk through an office scene. The Asus Xtion sensor has been kept in place manually. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.48GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
 |
Sequence 'freiburg3_walking_xyz_validation' Two persons walk through an office scene. The Asus Xtion sensor has manually been moved along three directions (xyz) while keeping the same orientation. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.52GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
 |
Sequence 'freiburg3_walking_halfsphere_validation' Two persons walk through an office scene. The Asus Xtion sensor has been moved on a small half sphere of approximately one meter diameter. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.67GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
 |
Sequence 'freiburg3_walking_rpy_validation' Two persons walk through an office scene. The Asus Xtion sensor has been rotated along the principal axes (roll-pitch-yaw) at the same position. This sequence is intended to evaluate the robustness of visual SLAM and odometry algorithms to quickly moving dynamic objects in large parts of the visible scene. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.45GB) RGB movie and depth movie |
Last modified: 08 Aug 2012, 08:27 |
Calibration Files
 |
Sequence 'freiburg1_rgb_calibration' This sequence contains color and depth images of the Kinect during checkerboard calibration. The side-length of the corners of the checkerboard is 0.02m. This sequence is intended to verify the calibration and re-calibration. We used this sequence for (1) finding the extrinsic camera parameters between the motion capture system and the optical frame of the Kinect and for (2) estimating the delay in the timestamps between the mocap system and the Kinect. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.87GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 50.27s Duration with ground-truth: 50.16s Ground-truth trajectory length: 0.003m Avg. translational velocity: 0.000m/s Avg. angular velocity: 0.023deg/s Trajectory dim.: 0.00m x 0.00m x 0.00m Last modified: 30 Sep 2011, 15:15 |
 |
Sequence 'freiburg1_ir_calibration' This sequence contains the IR (infrared) images of the Kinect during checkerboard calibration. The side-length of the corners of the checkerboard is 0.02m. This sequence is intended to verify the calibration and re-calibration. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.26GB) IR (infrared) movie |
Last modified: 30 Sep 2011, 15:14 |
|
Sequence 'freiburg1_large_checkerboard_calibration' This is a calibration sequence of the Kinect with a large checkerboard pattern, the side length is 0.108m. This sequence is intended to verify the calibration and re-calibration. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.90GB) ground truth trajectory RGB movie and depth movie |
Last modified: 10 Oct 2011, 14:18 |
 |
Sequence 'freiburg2_rgb_calibration' This sequence contains color and depth images of the Kinect during checkerboard calibration. The side-length of the corners of the checkerboard is 0.02m. This sequence is intended to verify the calibration and re-calibration. We used this sequence for (1) finding the extrinsic camera parameters between the motion capture system and the optical frame of the Kinect and for (2) estimating the delay in the timestamps between the mocap system and the Kinect. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.02GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 65.77s Duration with ground-truth: 65.10s Ground-truth trajectory length: 0.017m Avg. translational velocity: 0.000m/s Avg. angular velocity: 0.096deg/s Trajectory dim.: 0.00m x 0.00m x 0.00m Last modified: 30 Sep 2011, 15:22 |
 |
Sequence 'freiburg2_ir_calibration' This sequence contains the IR (infrared) images of the Kinect during checkerboard calibration. The side-length of the corners of the checkerboard is 0.02m. This sequence is intended to verify the calibration and re-calibration. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.31GB) IR (infrared) movie external camera view |
Last modified: 30 Sep 2011, 15:18 |
 |
Sequence 'freiburg2_large_checkerboard_calibration' This is a calibration sequence of the Kinect with a large checkerboard pattern, the side length is 0.108m. This sequence is intended to verify the calibration and re-calibration. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 1.37GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 65.02s Duration with ground-truth: 21.36s Ground-truth trajectory length: 20.052m Avg. translational velocity: 0.311m/s Avg. angular velocity: 3.400deg/s Trajectory dim.: 4.93m x 1.71m x 0.62m Last modified: 30 Sep 2011, 15:19 |
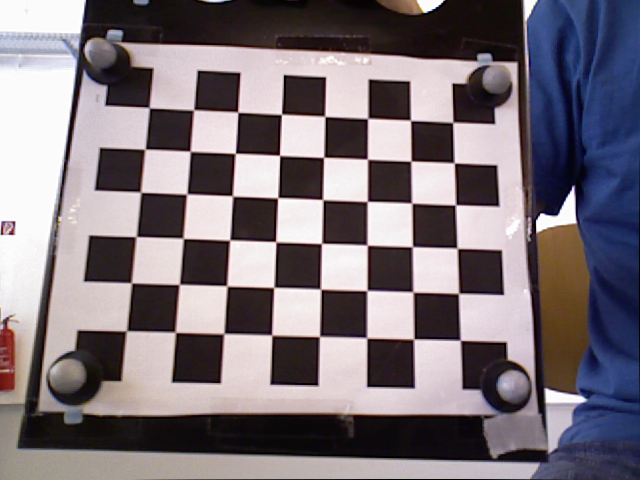 |
Sequence 'freiburg3_calibration_rgb_depth' This sequence contains color and depth images of the Asus Xtion for checkerboard calibration. The side-length of the corners of the checkerboard is 0.02m. This sequence was used to (1) estimate the intrinsic camera parameters (including distortion), (2) the extrinsic calibration between the motion capture system and the optical frame of the Kinect and (3) the delay in the timestamps between the mocap system and the Kinect. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.59GB) ground truth trajectory RGB movie and depth movie Downsampled bag file with point clouds |
Duration: 44.45s Duration with ground-truth: 44.46s Ground-truth trajectory length: 0.005m Avg. translational velocity: 0.000m/s Avg. angular velocity: 0.036deg/s Trajectory dim.: 0.00m x 0.00m x 0.00m Last modified: 07 Aug 2012, 18:50 |
 |
Sequence 'freiburg3_calibration_ir' This sequence contains images of the infrared camera of the Asus Xtion for checkerboard calibration. The side-length of the corners of the checkerboard is 0.02m. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.37GB) IR (infrared) movie |
Last modified: 07 Aug 2012, 18:56 |
 |
Sequence 'freiburg3_checkerboard_large' This sequence contains color and depth images of the Asus Xtion on a large checkerboard target. The side-length of the corners of the 9x7 checkerboard is 0.0892m. This sequence was used to verify that the reported depths correspond to the true depths. |
|
Download the sequence as a tgz archieve or ROS bag file (file size: approx. 0.78GB) ground truth trajectory RGB movie and depth movie external camera view Downsampled bag file with point clouds |
Duration: 53.41s Duration with ground-truth: 53.39s Ground-truth trajectory length: 19.745m Avg. translational velocity: 0.377m/s Avg. angular velocity: 4.883deg/s Trajectory dim.: 1.10m x 6.21m x 0.96m Last modified: 07 Aug 2012, 18:58 |
Click here for more information about the file formats.
If you have any questions regarding the datasets or the data format, please don't hesitate to contact Juergen Sturm.


