Research Interests
- Visual odometry (RGB-D cameras and laser scanners)
- Scene flow estimation and motion-based segmentation (RGB-D cameras)
- 3D reconstruction and tracking (RGB-D cameras)

Brief Bio
I was born in Loja (Granada, Spain) in 1988. I received a B.Sc-M.Sc in "Ingeniería Industrial" (a very general engineering which covers mechanics, computer science, electronics, electricity, etc.) from the University of Málaga in 2010 with highest honor. I also got a M.Sc in Mechatronics in 2012. I received a grant (DPI2011-25483) from the National (Spanish) Plan of Research to do a 4-year PhD under the supervision of Prof. Javier González-Jiménez, which I started in January 2013. From March to July 2014 I was a guest researcher at the Computer Vision group of the Technical University of Munich, and in February 2015 I became a PhD student at the same University, pursuing a joint doctorate, under the supervision of Prof. Daniel Cremers.
For more details (videos, code, etc.) please visit http://mapir.isa.uma.es/mjaimez
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2015
[] 
Fast Visual Odometry for 3-D Range Sensors , In IEEE Transactions on Robotics, volume 31, 2015. ([video])
Conference and Workshop Papers
2018
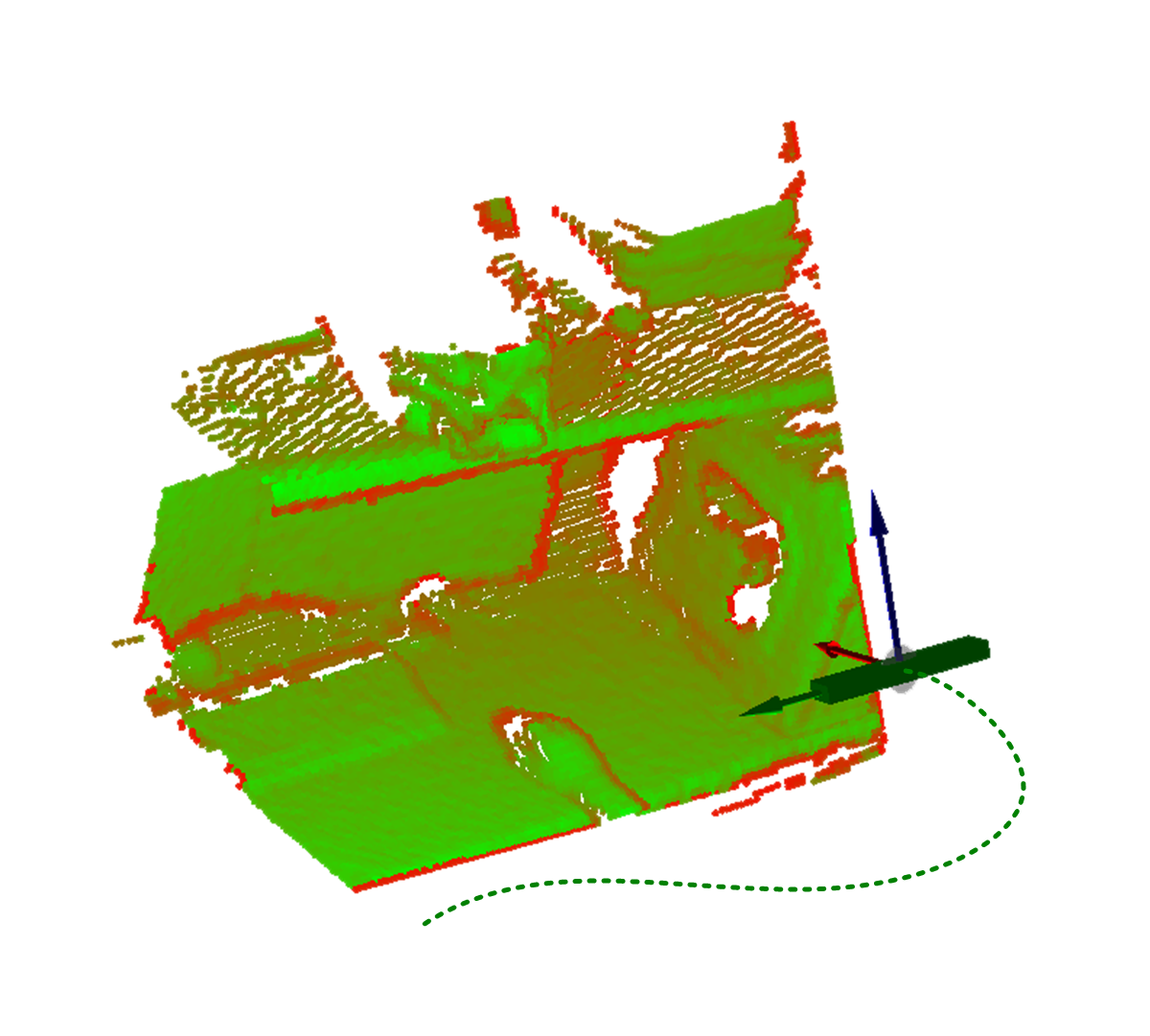
[] StaticFusion: Background Reconstruction for Dense RGB-D SLAM in Dynamic Environments , In 2018 IEEE International Conference on Robotics and Automation, ICRA 2018, Brisbane, Australia, May 21-25, 2018, IEEE, 2018.
2017
[] 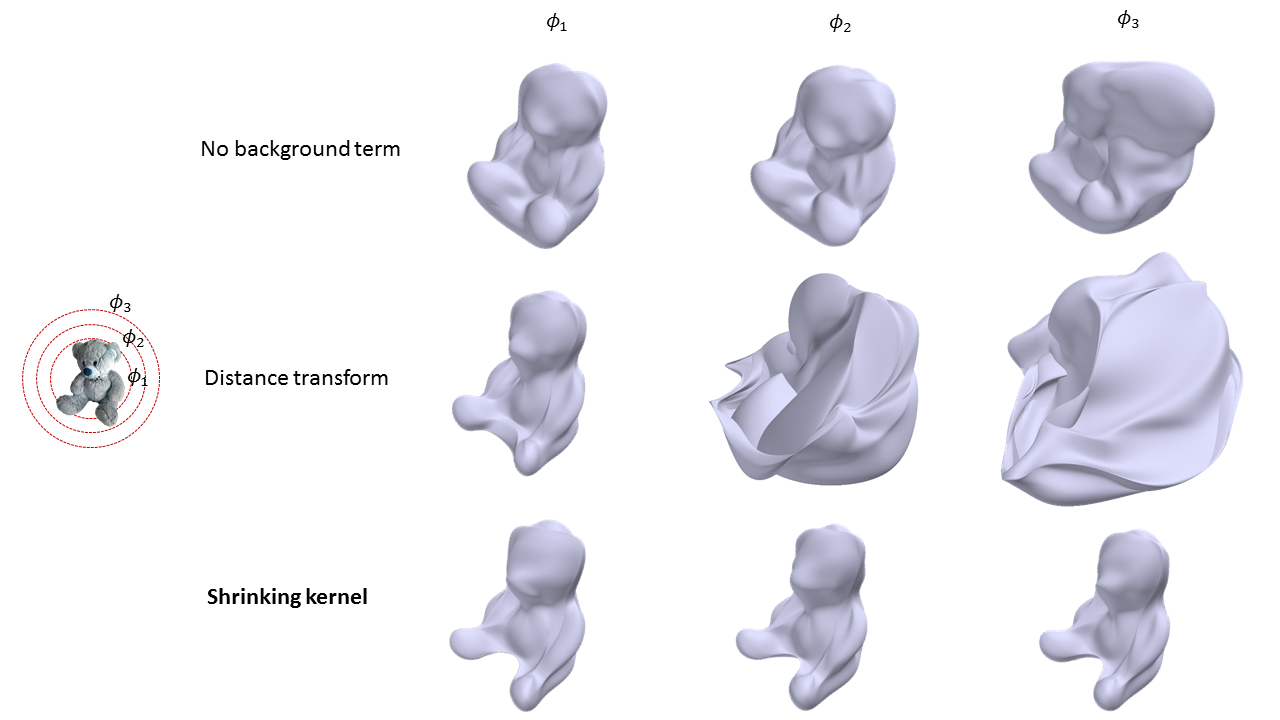
An Efficient Background Term for 3D Reconstruction and Tracking with Smooth Subdivision Surface Models , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017. ([video])
[] 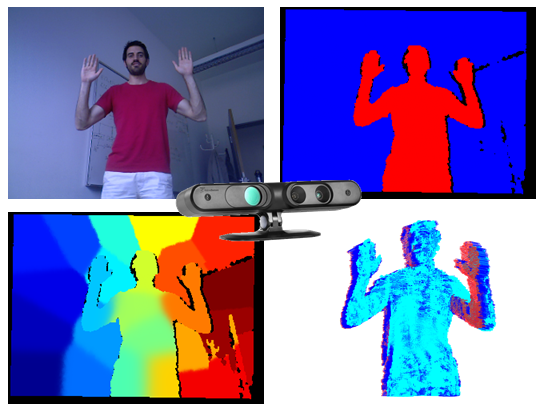
Fast Odometry and Scene Flow from RGB-D Cameras based on Geometric Clustering , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2017. ([video])
2016
[] 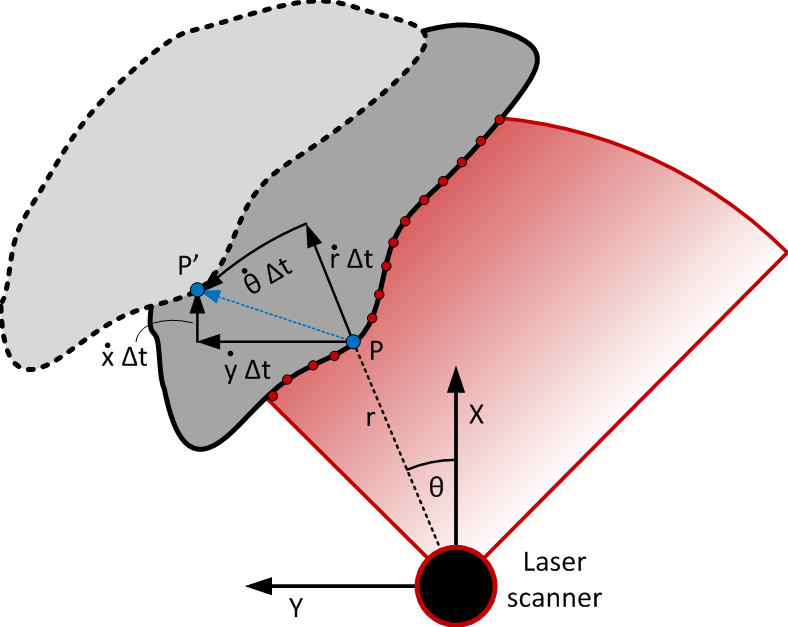
Planar Odometry from a Radial Laser Scanner. A Range Flow-based Approach , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2016. ([video])
2015
[] 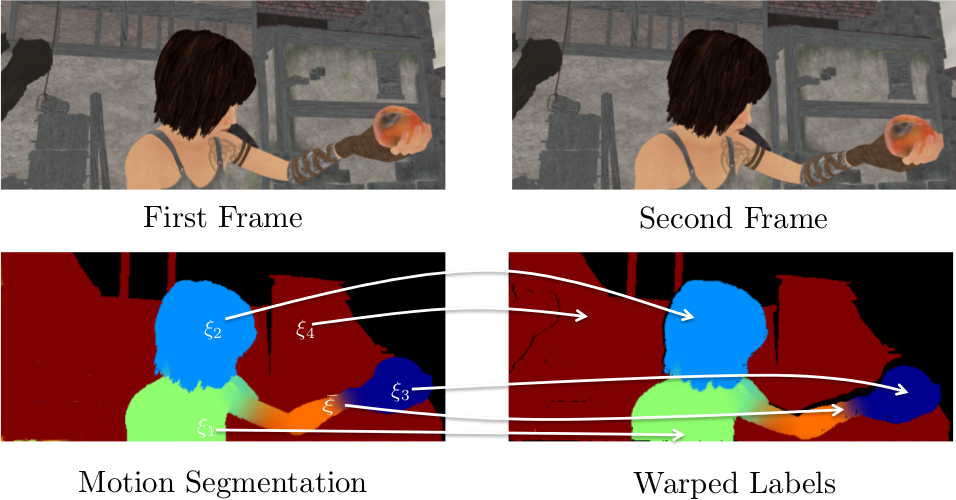
Motion Cooperation: Smooth Piece-Wise Rigid Scene Flow from RGB-D Images , In Proc. of the Int. Conference on 3D Vision (3DV), 2015. ([video])
[] 
A Primal-Dual Framework for Real-Time Dense RGB-D Scene Flow , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2015. ([video])


