The Probabilistic Normal Epipolar Constraint for Frame-To-Frame Rotation Optimization under Uncertain Feature Positions
CVPR 2022
Authors: Dominik Muhle*, Lukas Koestler*, Publications, Florian Bernard, Daniel Cremers
For up-to-date information, code, and data please visit our Github repository
Abstract
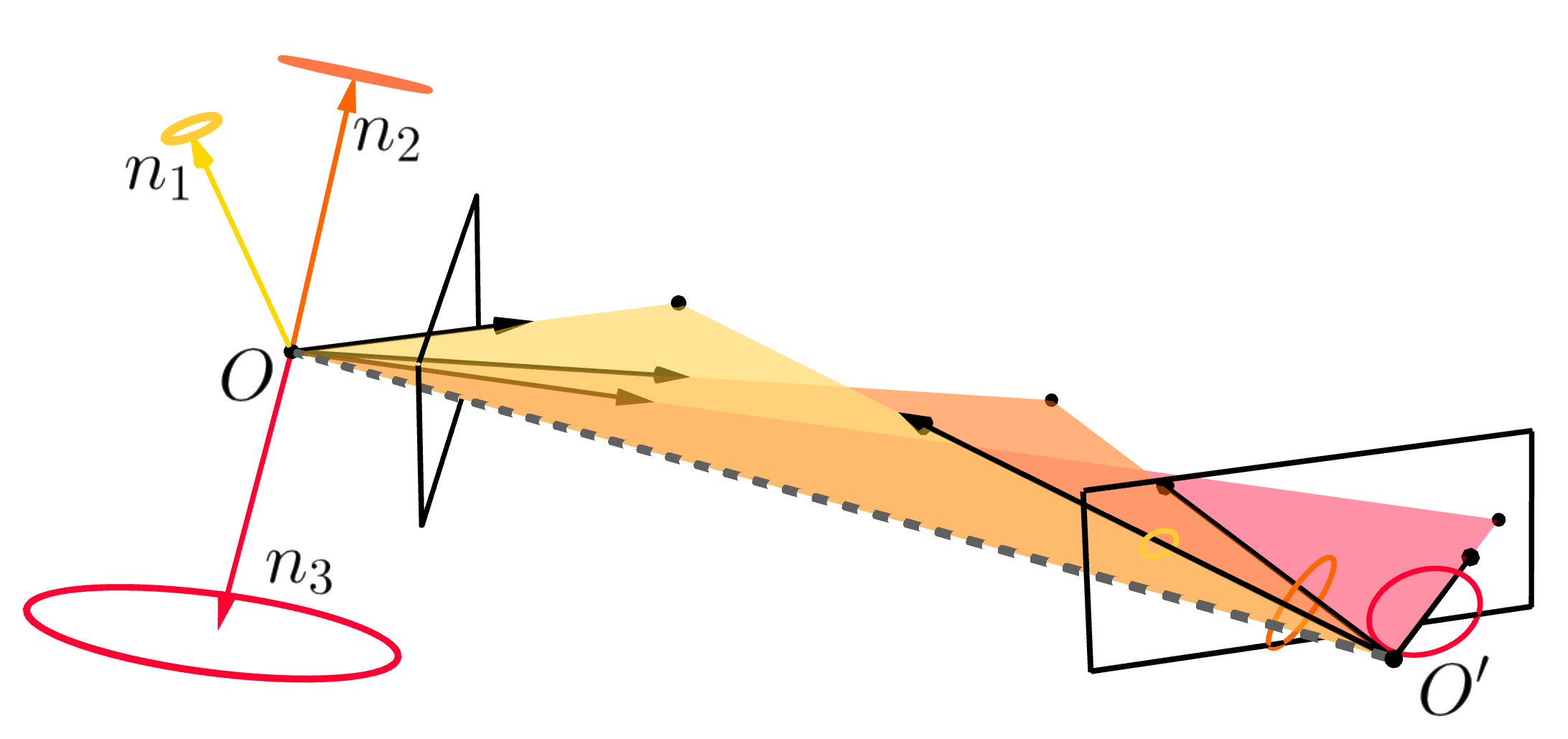
The estimation of the relative pose of two camera views is a fundamental problem in computer vision. Kneip et al. proposed to solve this problem by introducing the normal epipolar constraint (NEC). However, their approach does not take into account uncertainties, so that the accuracy of the estimated relative pose is highly dependent on accurate feature positions in the target frame. In this work, we introduce the probabilistic normal epipolar constraint (PNEC) that overcomes this limitation by accounting for anisotropic and inhomogeneous uncertainties in the feature positions. To this end, we propose a novel objective function, along with an efficient optimization scheme that effectively minimizes our objective while maintaining real-time performance. In experiments on synthetic data, we demonstrate that the novel PNEC yields more accurate rotation estimates than the original NEC and several popular relative rotation estimation algorithms. Furthermore, we integrate the proposed method into a state-of-the-art monocular rotation-only odometry system and achieve consistently improved results for the real-world KITTI dataset.
Video
Poster

Publications
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2023
[] 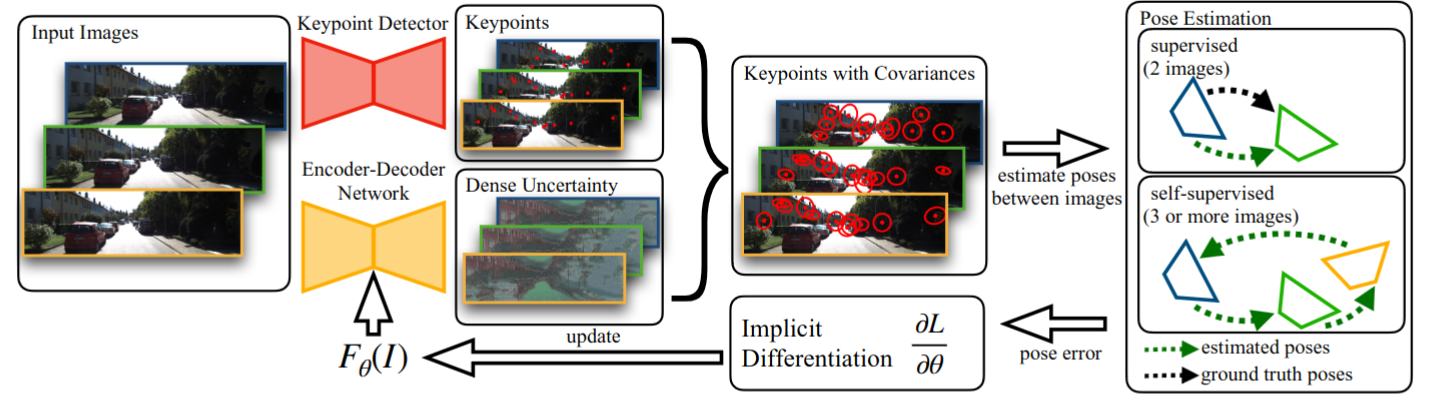
Learning Correspondence Uncertainty via Differentiable Nonlinear Least Squares , In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023. ([project page])
2022
[] 
The Probabilistic Normal Epipolar Constraint for Frame-To-Frame Rotation Optimization under Uncertain Feature Positions , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022. ([project page])


