This is an old revision of the document!
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry
Contact: Nan Yang, Lukas Von Stumberg, Rui Wang, Prof. Daniel Cremers
Export as PDF, XML, TEX or BIB
Journal Articles
2018
[] 
Direct Sparse Odometry , In IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018.
Conference and Workshop Papers
2021
[] 
MonoRec: Semi-Supervised Dense Reconstruction in Dynamic Environments from a Single Moving Camera , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2021. ([project page])
2020
[] 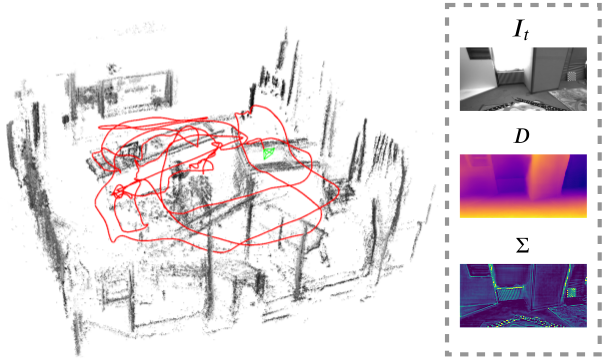
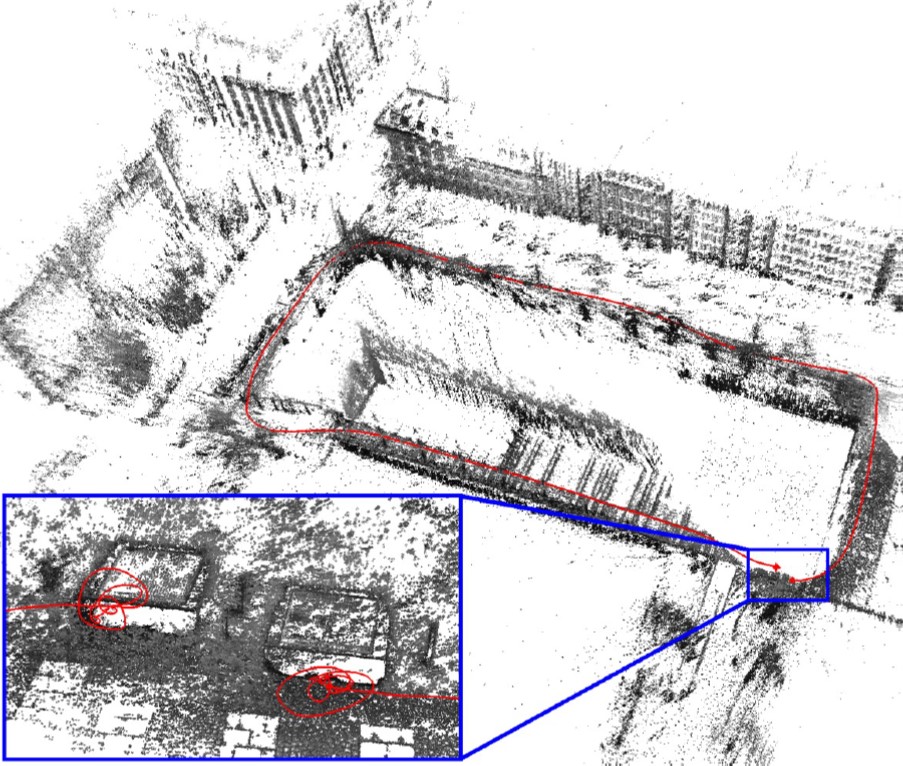
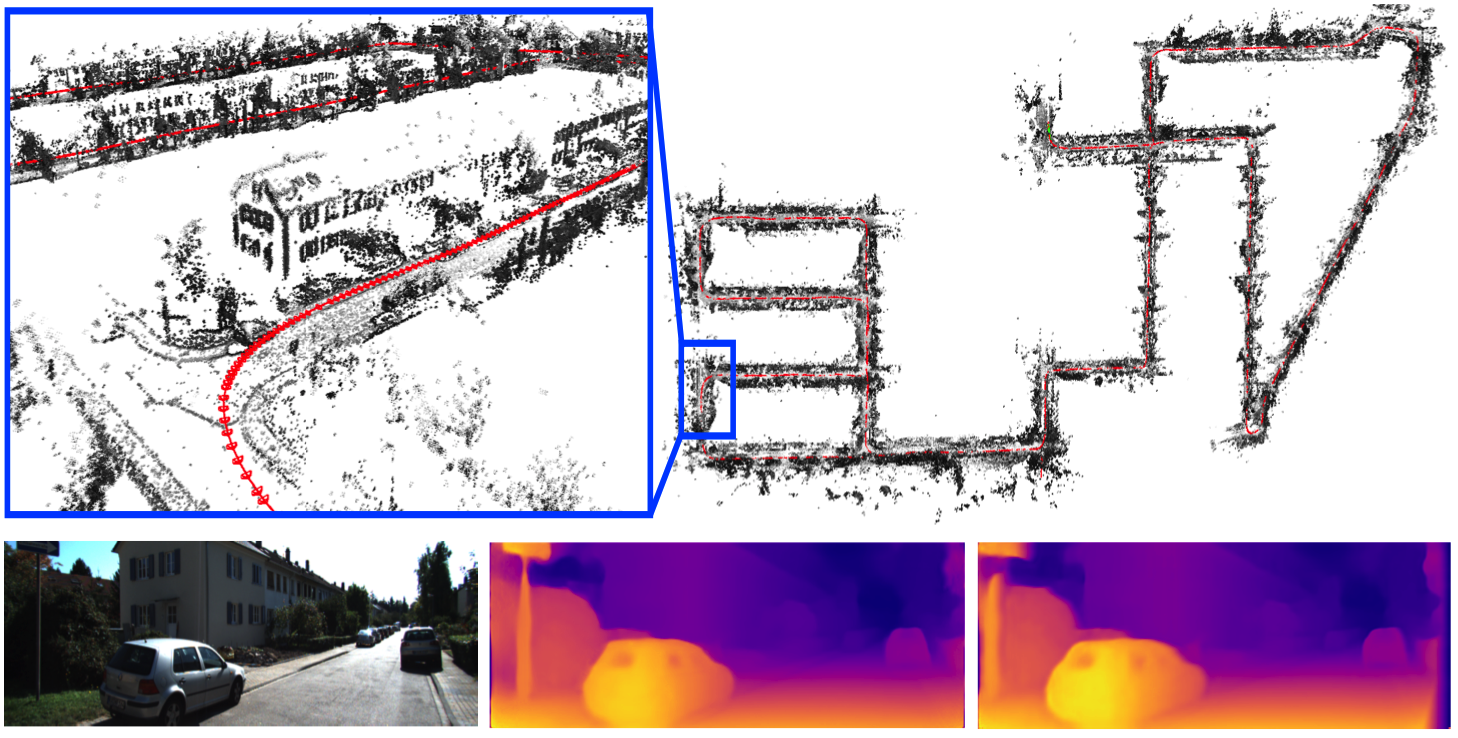
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2018
[] 
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry , In European Conference on Computer Vision (ECCV), 2018. ([arxiv],[supplementary],[project])
Oral Presentation


