This is an old revision of the document!
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry
Contact: Nan Yang, Lukas Von Stumberg, Rui Wang, Prof. Daniel Cremers
Export as PDF, XML, TEX or BIB
Journal Articles
2022
[] 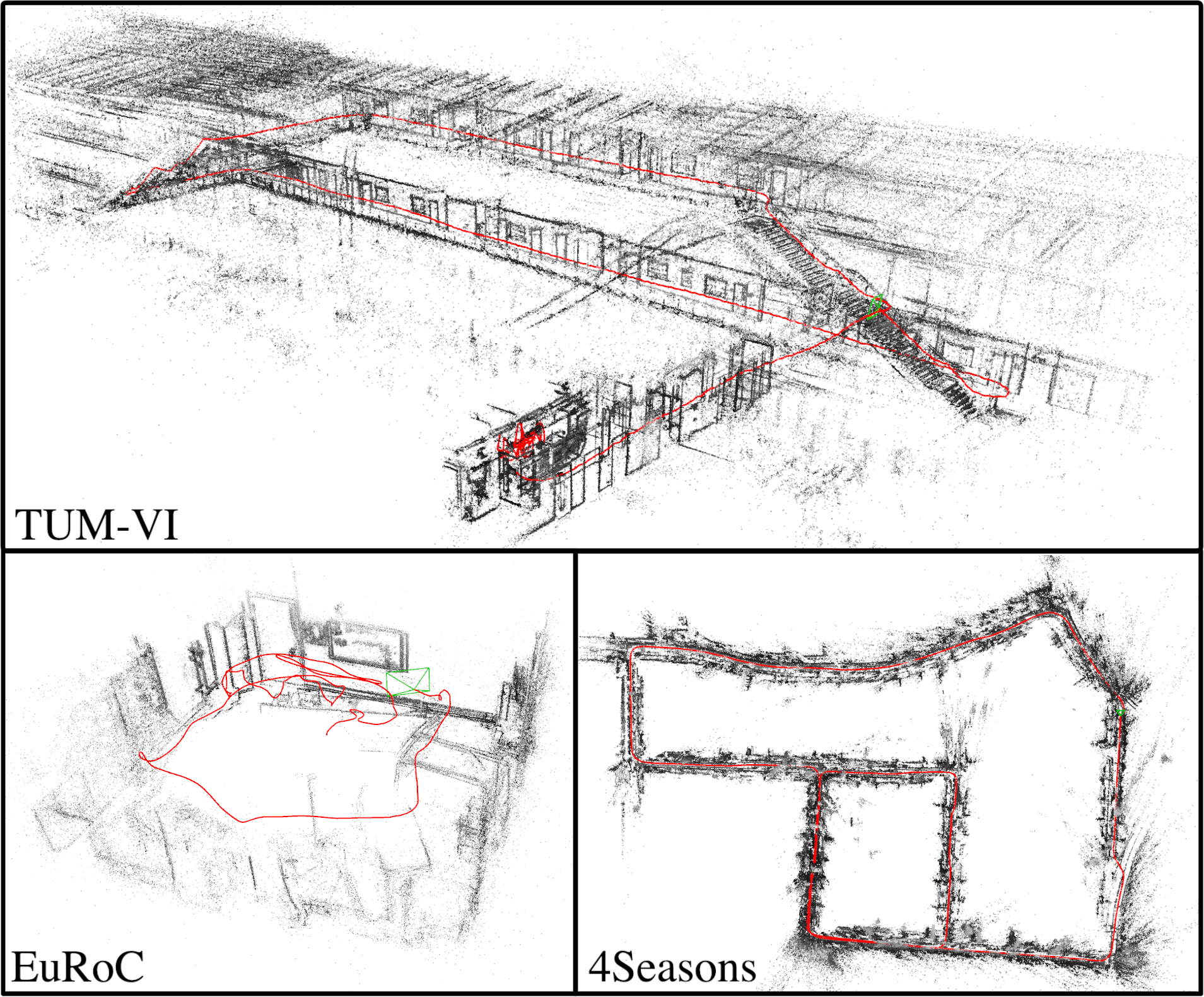
DM-VIO: Delayed Marginalization Visual-Inertial Odometry , In IEEE Robotics and Automation Letters (RA-L) & International Conference on Robotics and Automation (ICRA), volume 7, 2022. ([arXiv][video][project page][supplementary][code])
2018
[] 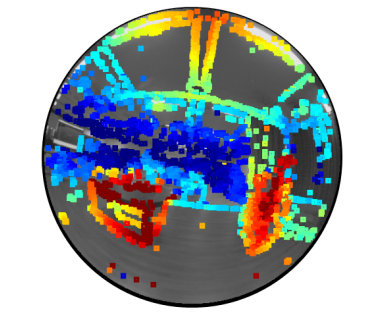
Omnidirectional DSO: Direct Sparse Odometry with Fisheye Cameras , In IEEE Robotics and Automation Letters & Int. Conference on Intelligent Robots and Systems (IROS), IEEE, 2018. ([arxiv])
[] 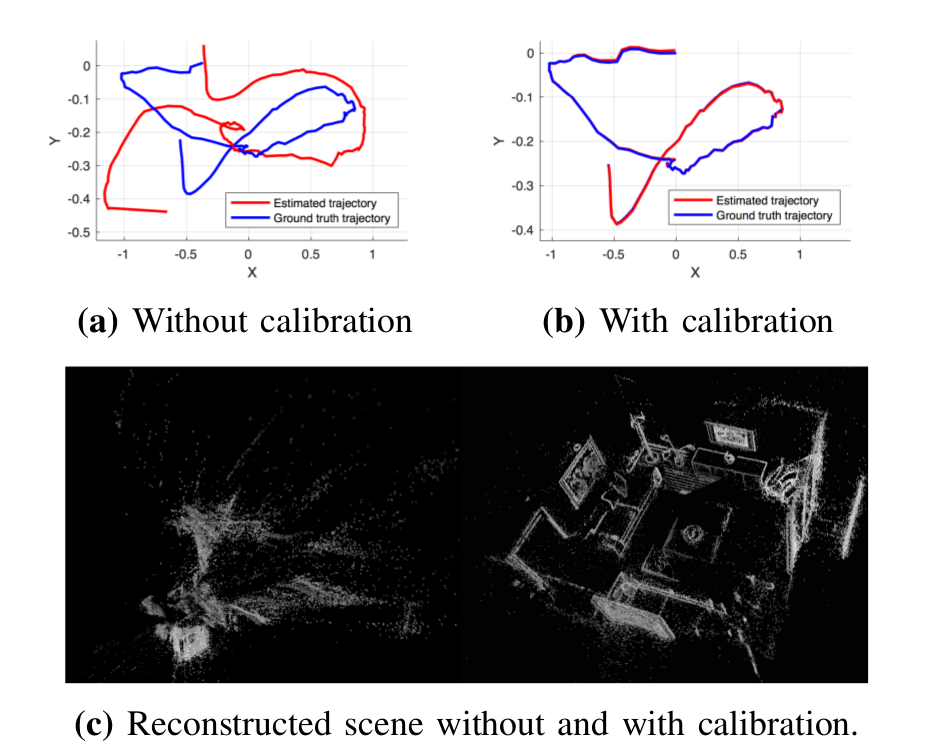
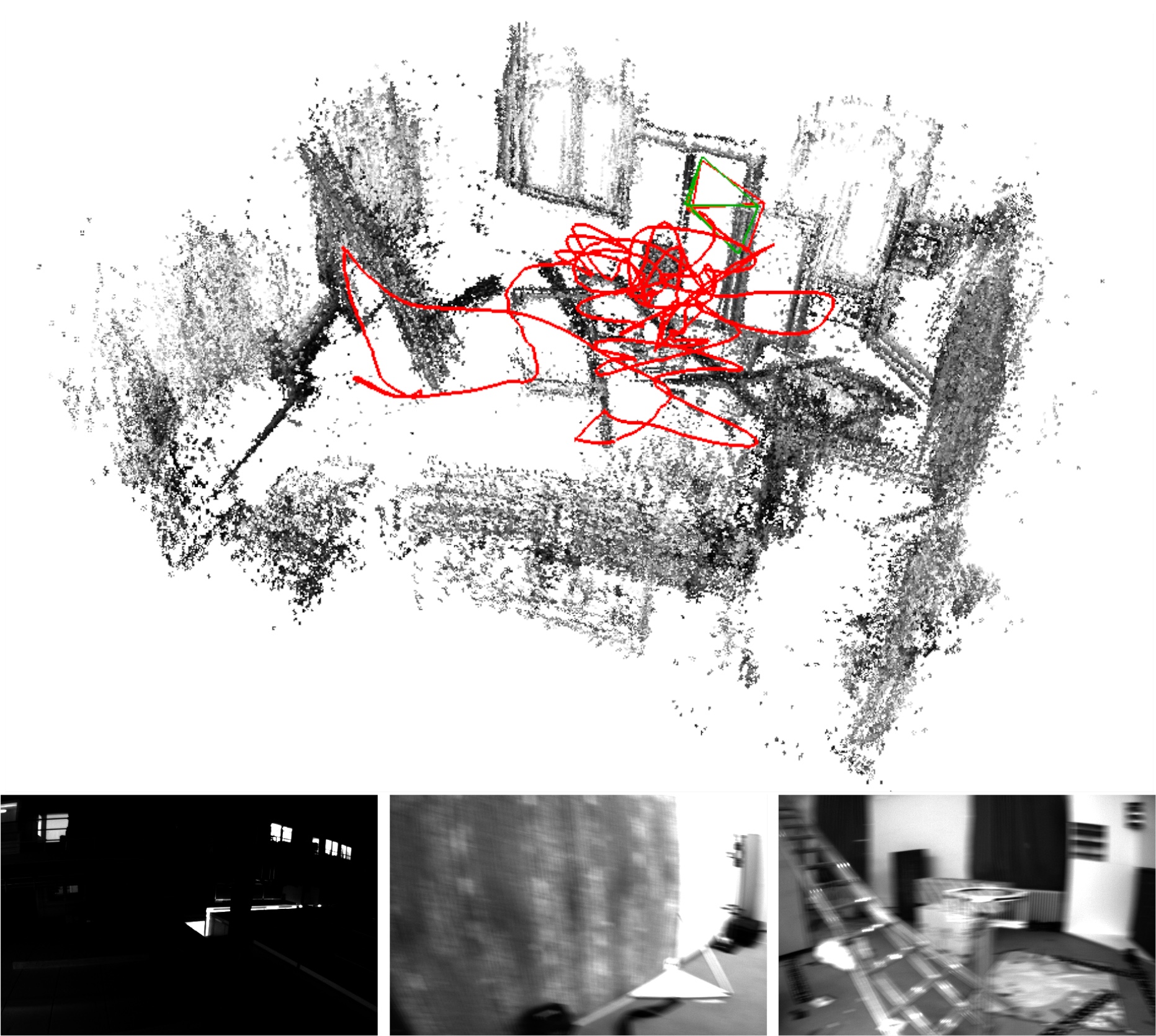
Online Photometric Calibration of Auto Exposure Video for Realtime Visual Odometry and SLAM , In IEEE Robotics and Automation Letters (RA-L), volume 3, 2018. (This paper was also selected by ICRA'18 for presentation at the conference.[arxiv][video][code][project])
ICRA'18 Best Vision Paper Award - Finalist [] 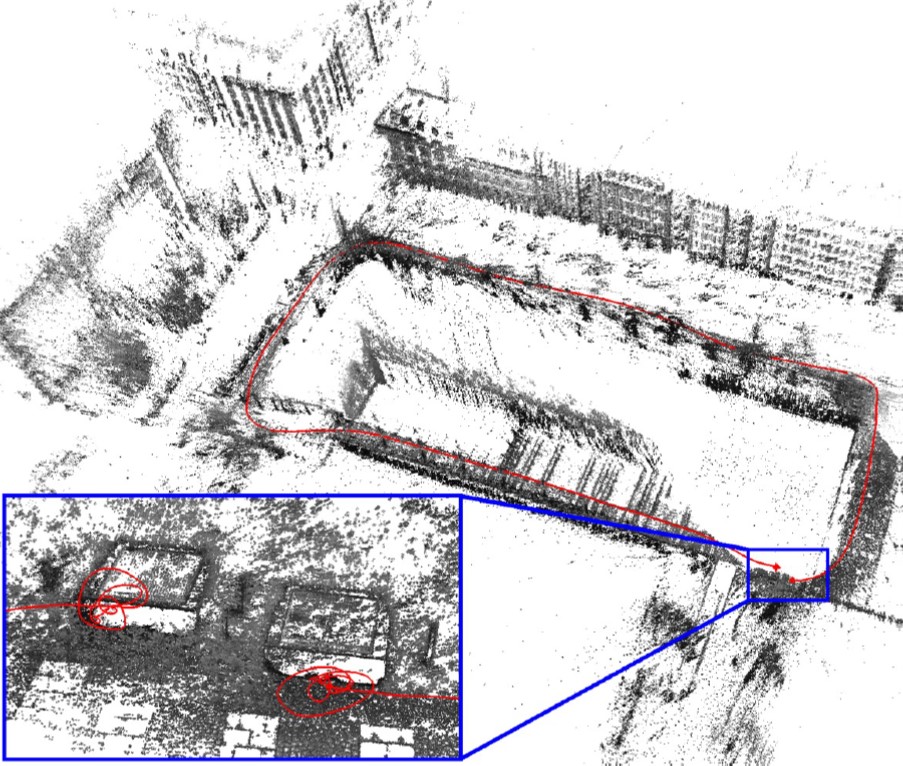
Direct Sparse Odometry , In IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018.
Conference and Workshop Papers
2021
[] 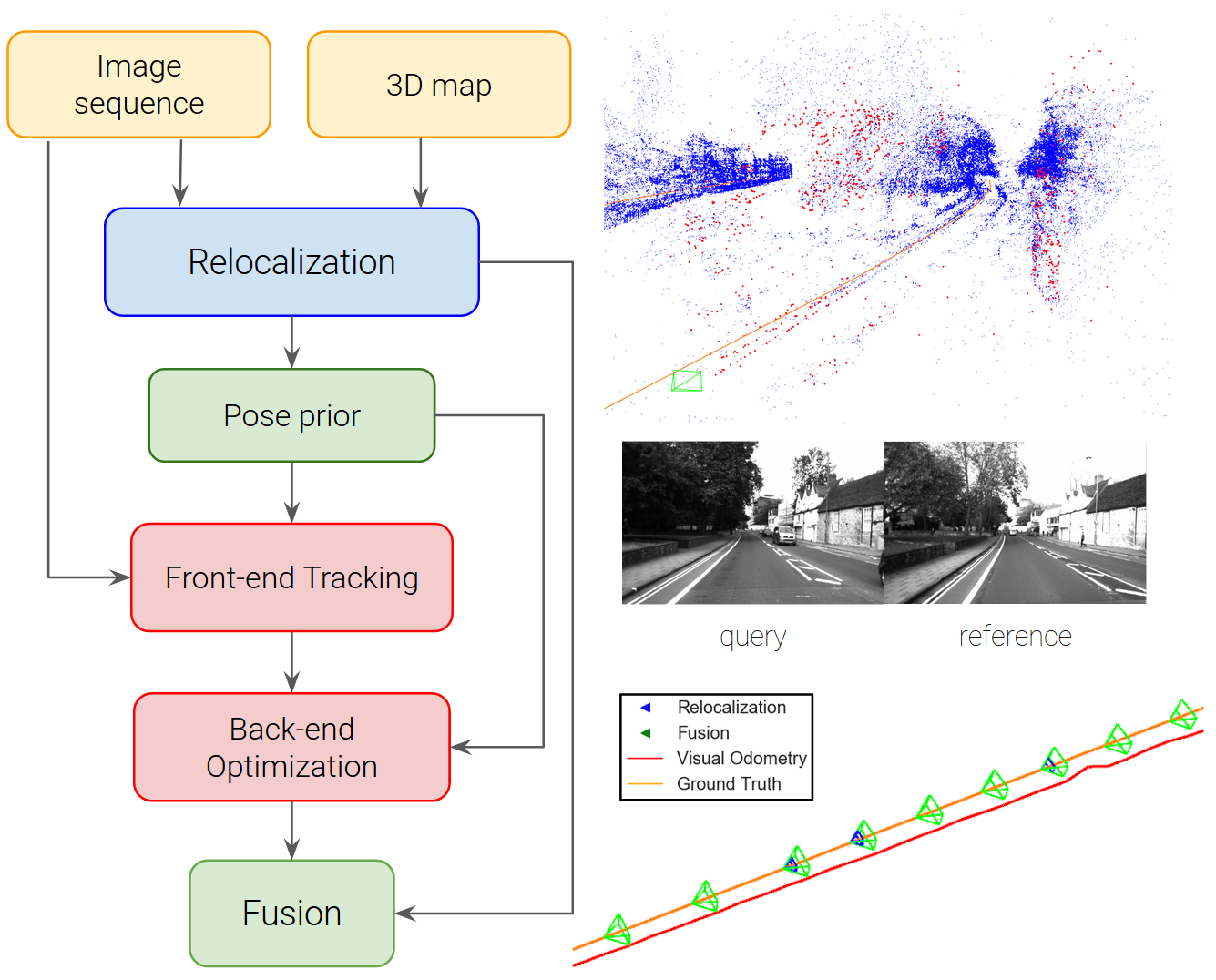
Tight Integration of Feature-based Relocalization in Monocular Direct Visual Odometry , In Proc. of the IEEE International Conference on Robotics and Automation (ICRA), 2021. ([project page])
2020
[] 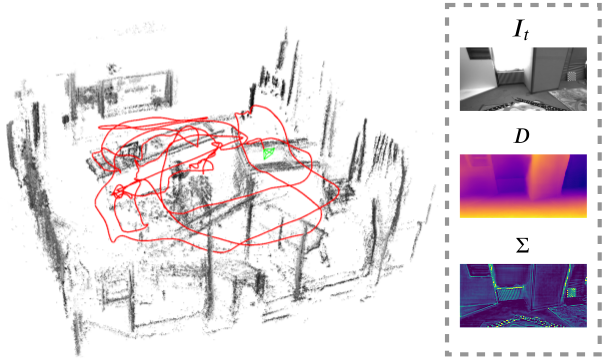
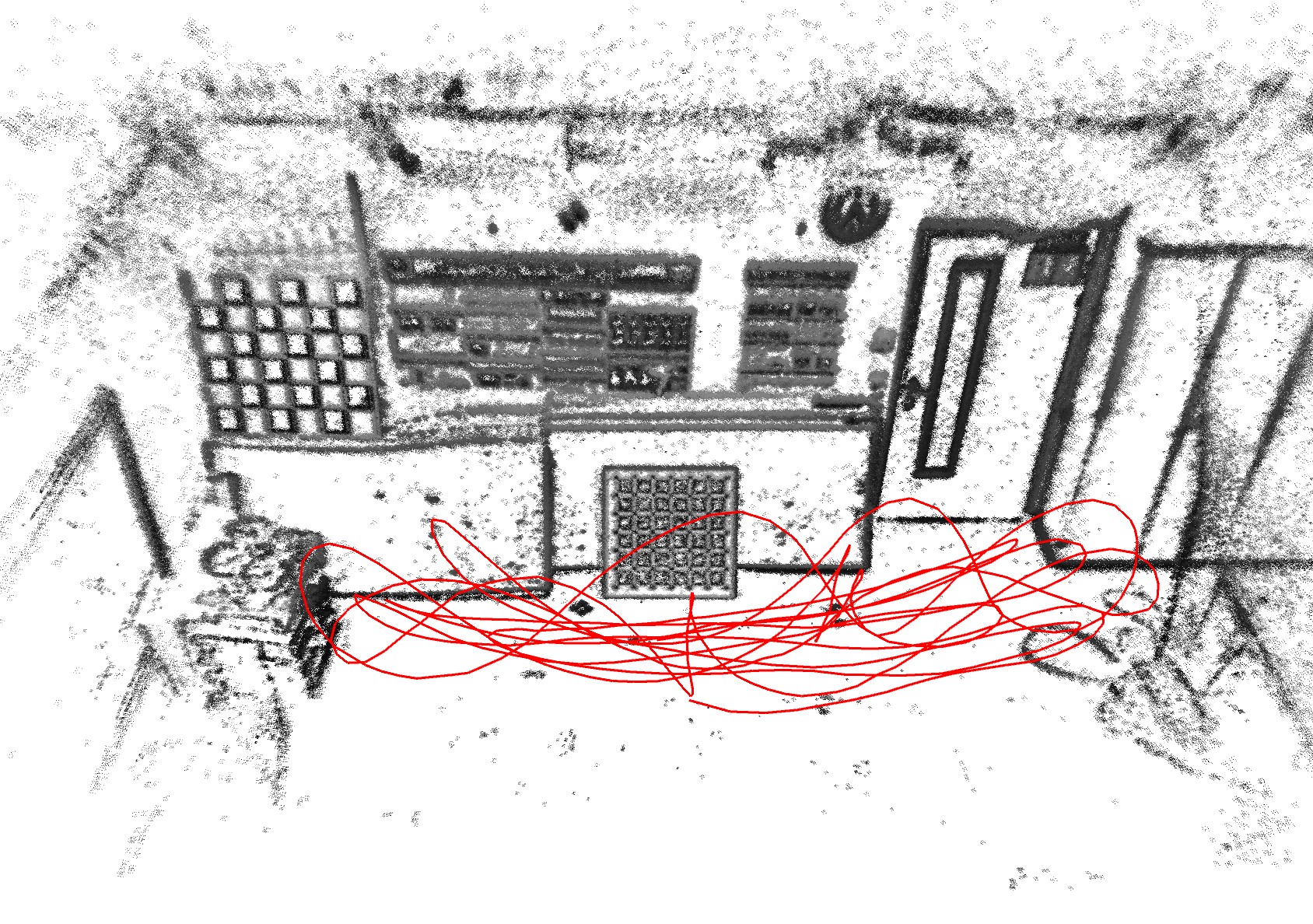
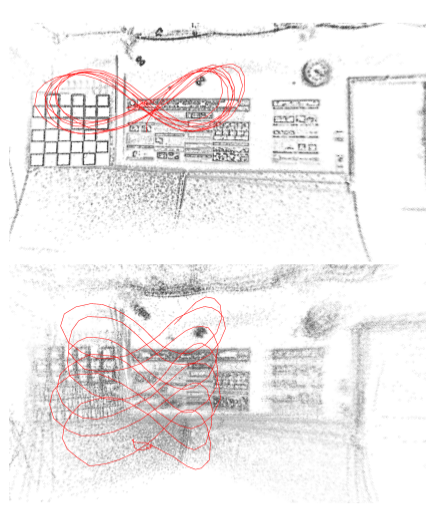
D3VO: Deep Depth, Deep Pose and Deep Uncertainty for Monocular Visual Odometry , In IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2020.
Oral Presentation
2019
[] 
Rolling-Shutter Modelling for Visual-Inertial Odometry , In International Conference on Intelligent Robots and Systems (IROS), 2019. ([arxiv])
2018
[] 
Direct Sparse Odometry With Rolling Shutter , In European Conference on Computer Vision (ECCV), 2018. ([supplementary][arxiv])
Oral Presentation [] 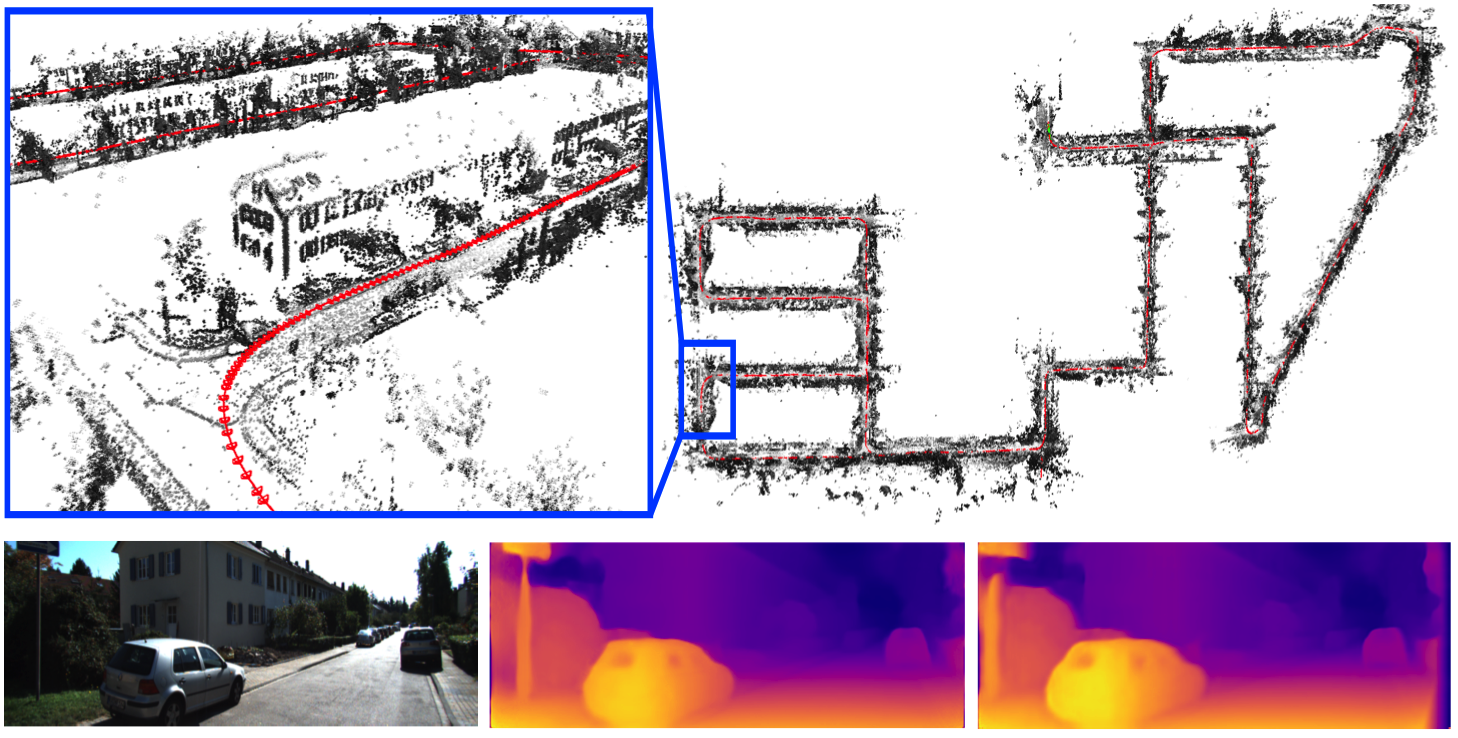
Deep Virtual Stereo Odometry: Leveraging Deep Depth Prediction for Monocular Direct Sparse Odometry , In European Conference on Computer Vision (ECCV), 2018. ([arxiv],[supplementary],[project])
Oral Presentation [] 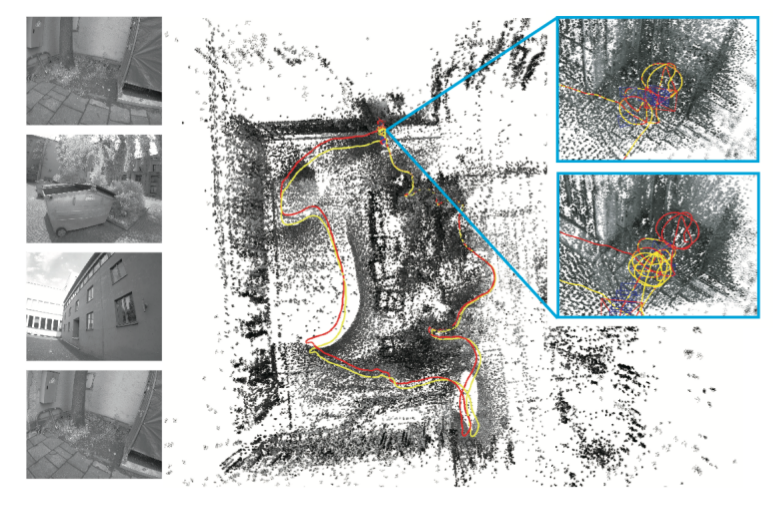
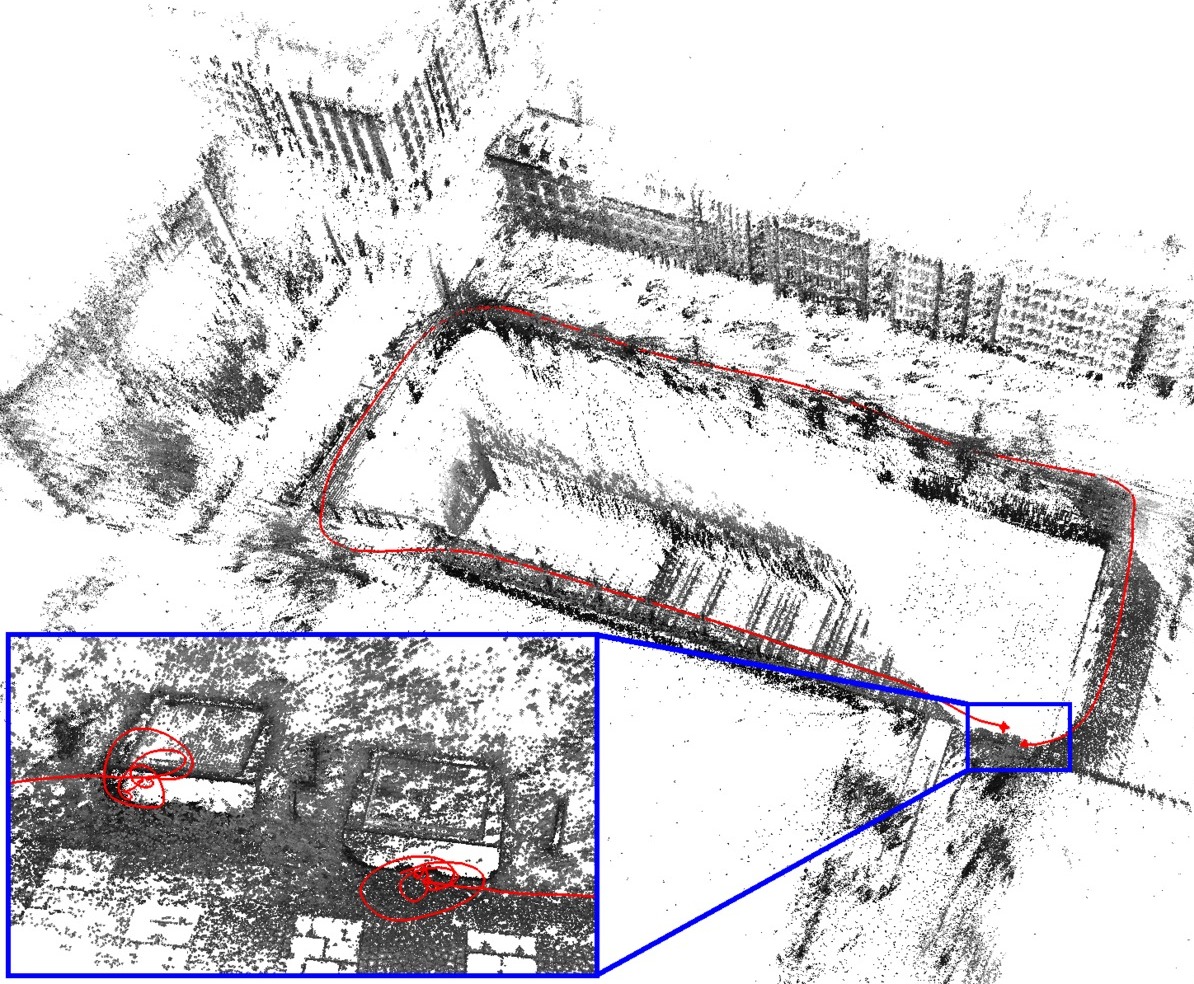
LDSO: Direct Sparse Odometry with Loop Closure , In International Conference on Intelligent Robots and Systems (IROS), 2018. ([arxiv][video][code][project])
[] 
Direct Sparse Visual-Inertial Odometry using Dynamic Marginalization , In International Conference on Robotics and Automation (ICRA), 2018. ([supplementary][video][arxiv])
2017
[] 
Stereo DSO: Large-Scale Direct Sparse Visual Odometry with Stereo Cameras , In International Conference on Computer Vision (ICCV), 2017. ([supplementary][video][arxiv][project])
2016
[] 
Direct Sparse Odometry , In arXiv:1607.02565, 2016.
[] 
A Photometrically Calibrated Benchmark For Monocular Visual Odometry , In arXiv:1607.02555, 2016.


