|
You're viewing the old homepage. The new homepage of Jürgen Sturm is located here: http://jsturm.de. |
Research
I am currently working in the following research problems:

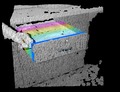
| RGB-D Vision including visual odometry, SLAM, dense 3D reconstruction, mapping, localization, pose tracking and benchmarking |

| Micro Aerial Vehicles (MAVs), including camera-based localization, dense mapping, data fusion, safe navigation and, when all of this works, flying manipulation |
In my PhD thesis, I presented novel approaches for:

| Body Schema Learning including bootstrapping and life-long adaptation of the body schema and kinematic models, and robust control in the presence of hardware failures |
| Learning Kinematic Models for Articulated Objects including robust model estimation, Bayesian model comparison and selection, visual perception of articulated objects and robust control with mobile manipulation robots |
| Imitation Learning to learn task descriptions from human demonstrations |

| Tactile Sensing for manipulation robots, to enable them to recognize objects and estimate their internal state using tactile sensors |
I received my master's degree from the University of Amsterdam in 2006. In my master's thesis, I developed a visual compass for mobile robots.
| A visual compass for mobile robots developed for the Dutch Aibo Team and the RoboCup robotic soccer competitions. |


