Correspondence Problems, Segmentation, SLAM, Variational Methods, Partial Differential Equations
Frank Steinbrücker received his Bachelor's degree in 2007 and his Master's degree in Computer Science in 2008 at Saarland University (Germany).
Since September 2008 he is a Ph.D. student in the Research Group for Computer Vision,
Image Processing and Pattern Recognition at the University of Bonn headed by
Professor Daniel Cremers.
At ICCV 2011 I published a method for getting a camera pose estimation from RGBD-Images.
In the video below, the Kinect camera is moving in a static scene and the camera poses are being accurately estimated.
Export as PDF, XML, TEX or BIB
|
| Book Chapters
|
| 2013
|
| [] |  | Moment Constraints in Convex Optimization for Segmentation and Tracking (M. Klodt, F. Steinbruecker and D. Cremers), Chapter in Advanced Topics in Computer Vision, Springer, 2013.
|
|
| Conference and Workshop Papers
|
| 2014
|
| [] |  | Volumetric 3D Mapping in Real-Time on a CPU (F. Steinbruecker, J. Sturm and D. Cremers), In International Conference on Robotics and Automation (ICRA), 2014.
|
| 2013
|
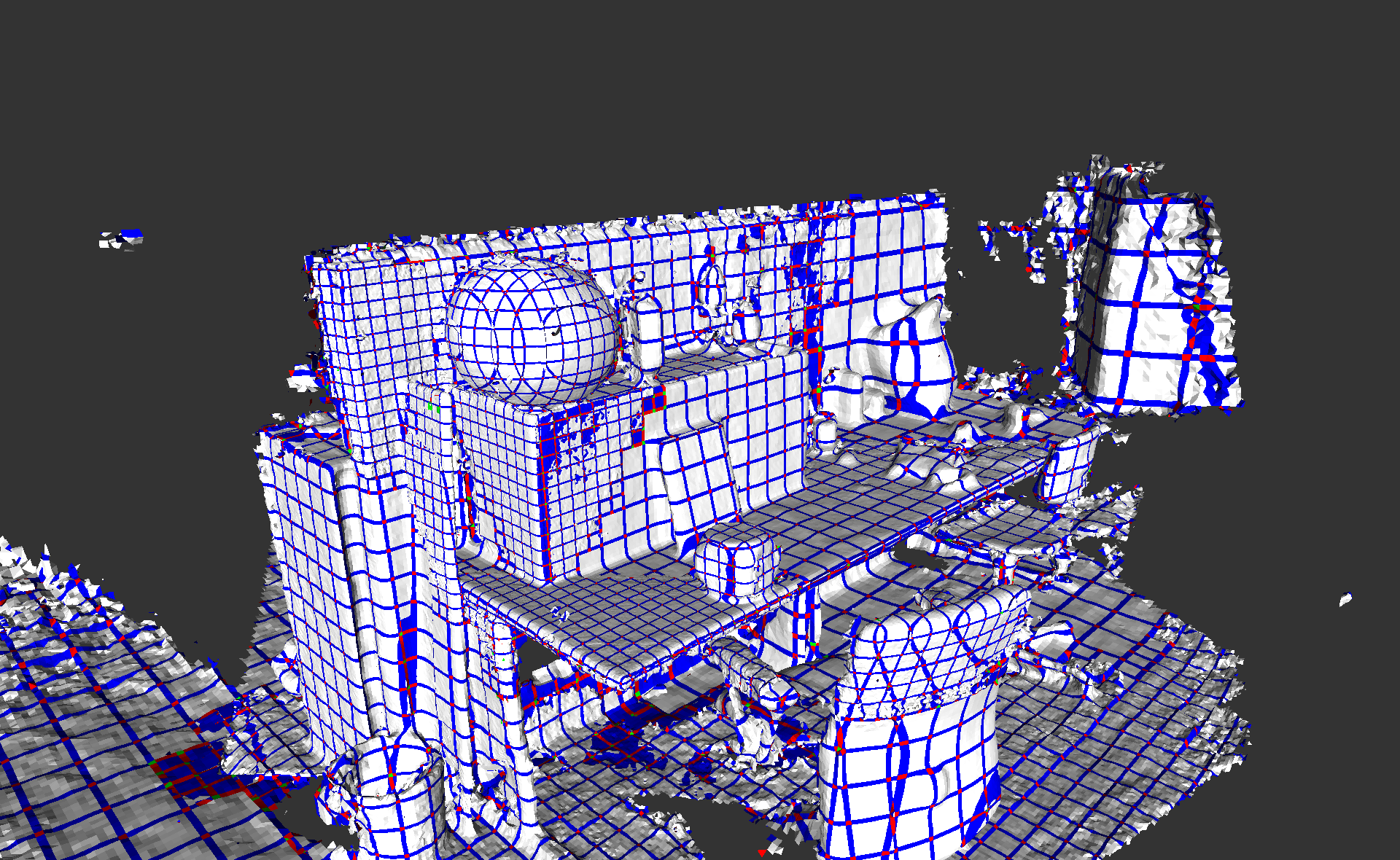
| [] | 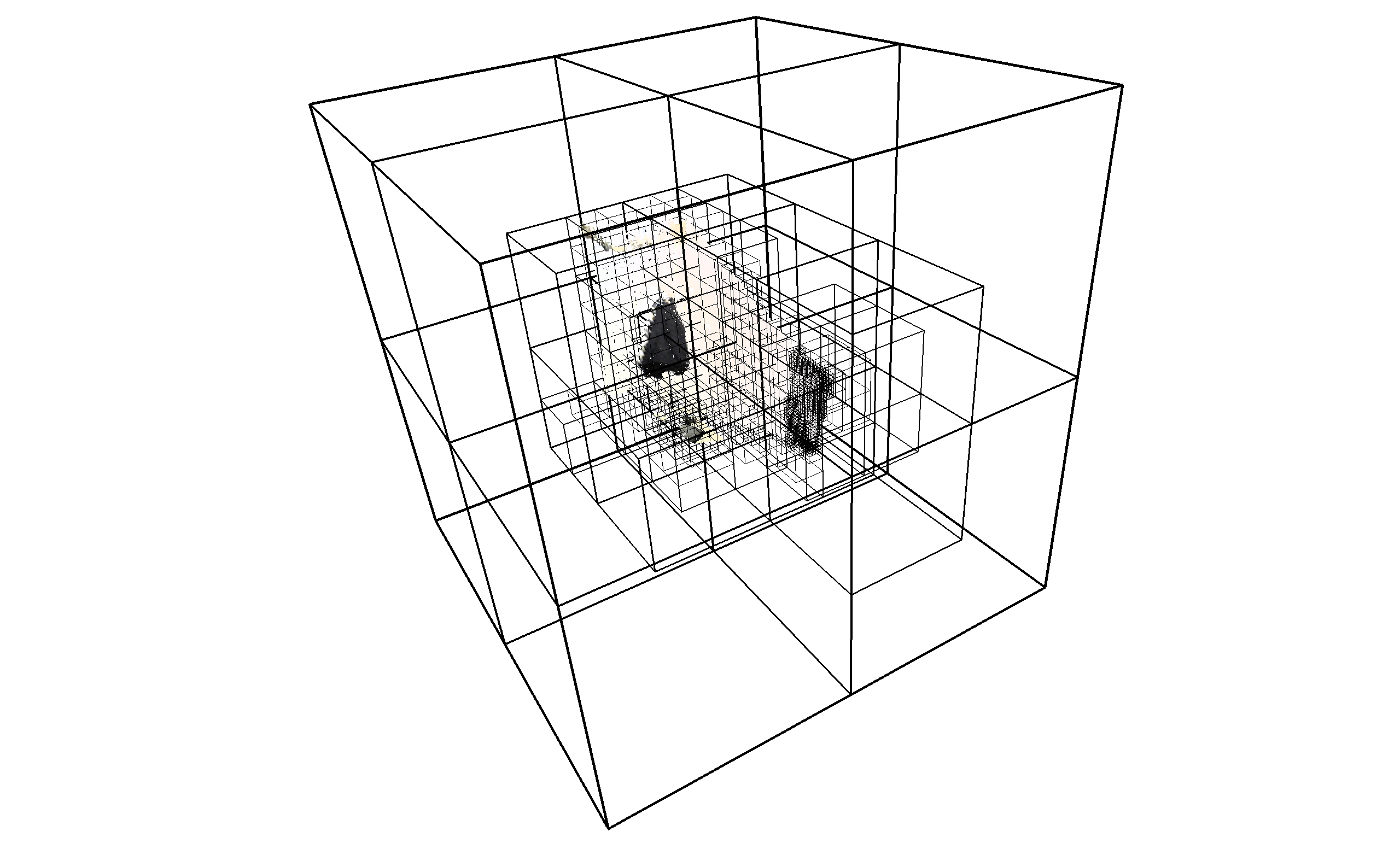 | Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences (F. Steinbruecker, C. Kerl, J. Sturm and D. Cremers), In IEEE International Conference on Computer Vision (ICCV), 2013.
|
| 2011
|
| [] |  | Real-Time Visual Odometry from Dense RGB-D Images (F. Steinbruecker, J. Sturm and D. Cremers), In Workshop on Live Dense Reconstruction with Moving Cameras at the Intl. Conf. on Computer Vision (ICCV), 2011.
|
| 2009
|
| [] | | Advanced Data Terms for Variational Optic Flow Estimation (F. Steinbruecker, T. Pock and D. Cremers), In Proceedings Vision, Modeling and Visualization (VMV), 2009.
|
| [] |  | Large Displacement Optical Flow Computation without Warping (F. Steinbruecker, T. Pock and D. Cremers), In IEEE International Conference on Computer Vision (ICCV), 2009.
|


