Christian Kerl
Technical University of Munich
School of Computation, Information and Technology
Informatics 9
Boltzmannstrasse 3
85748 Garching
Germany
Fax: +49-89-289-17757
Office:
Mail:
Research Interests
dense visual odometry, autonomous quadrocopters, large-scale 3D reconstruction, motion segmentation
Publications
Export as PDF, XML, TEX or BIB
Conference and Workshop Papers
2017
[] 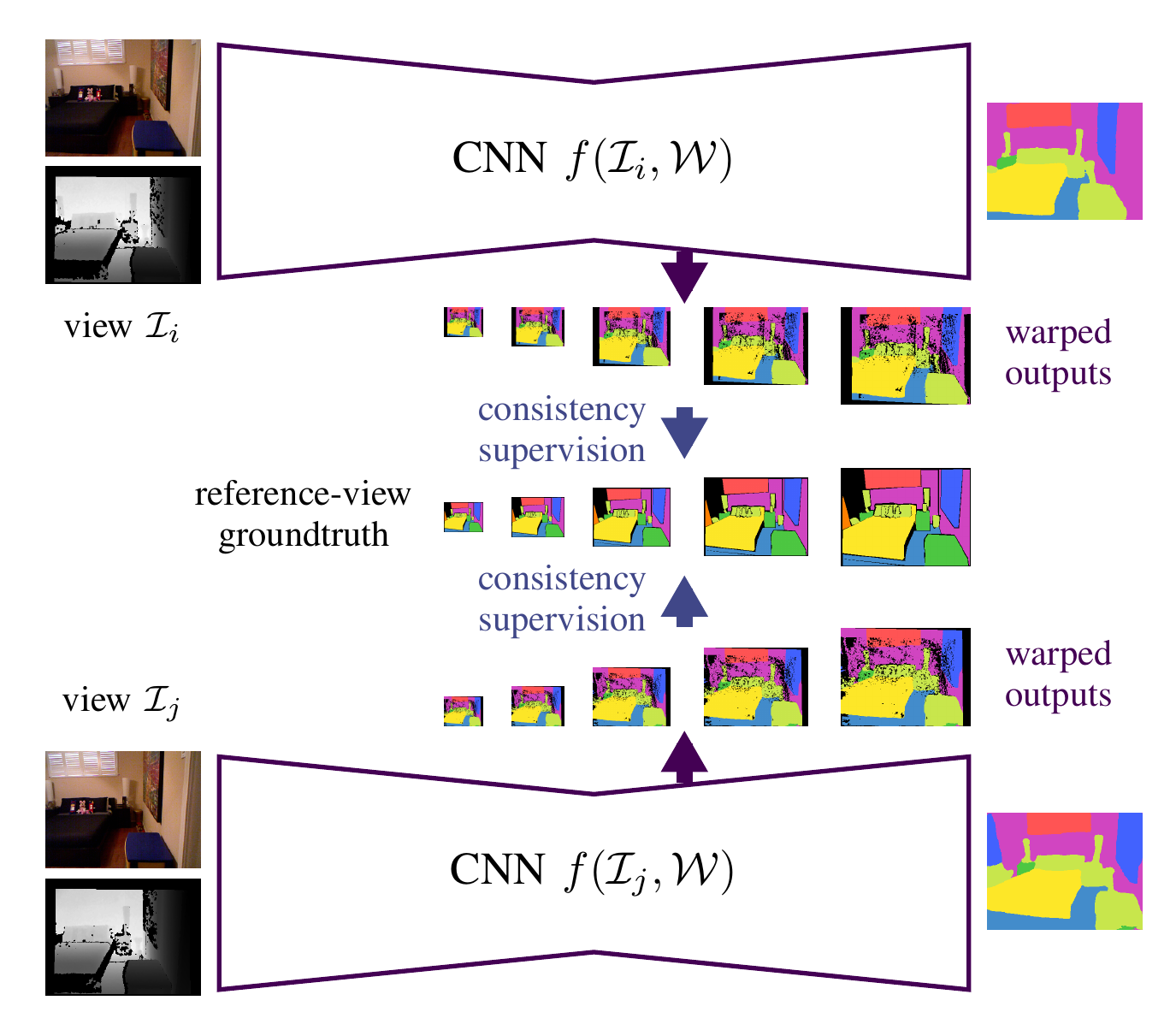
Multi-View Deep Learning for Consistent Semantic Mapping with RGB-D Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2017.
[] 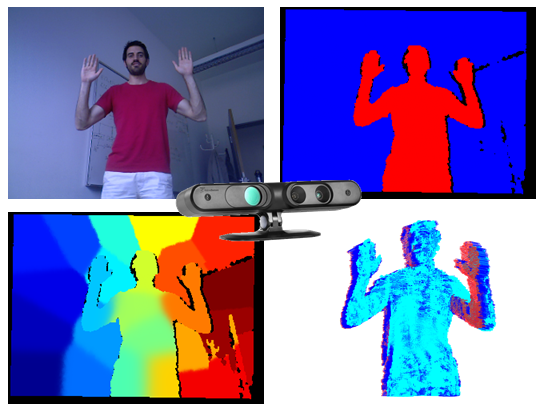
Fast Odometry and Scene Flow from RGB-D Cameras based on Geometric Clustering , In Proc. of the IEEE Int. Conf. on Robotics and Automation (ICRA), 2017. ([video])
2016
[] 
CPA-SLAM: Consistent Plane-Model Alignment for Direct RGB-D SLAM , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
Dense Continuous-Time Tracking and Mapping with Rolling Shutter RGB-D Cameras , In IEEE International Conference on Computer Vision (ICCV), 2015. ([video][supplementary][datasets])
2014
[] 
Towards Illumination-invariant 3D Reconstruction using ToF RGB-D Cameras , In International Conference on 3D Vision (3DV), 2014. ([supplementary])
2013
[] 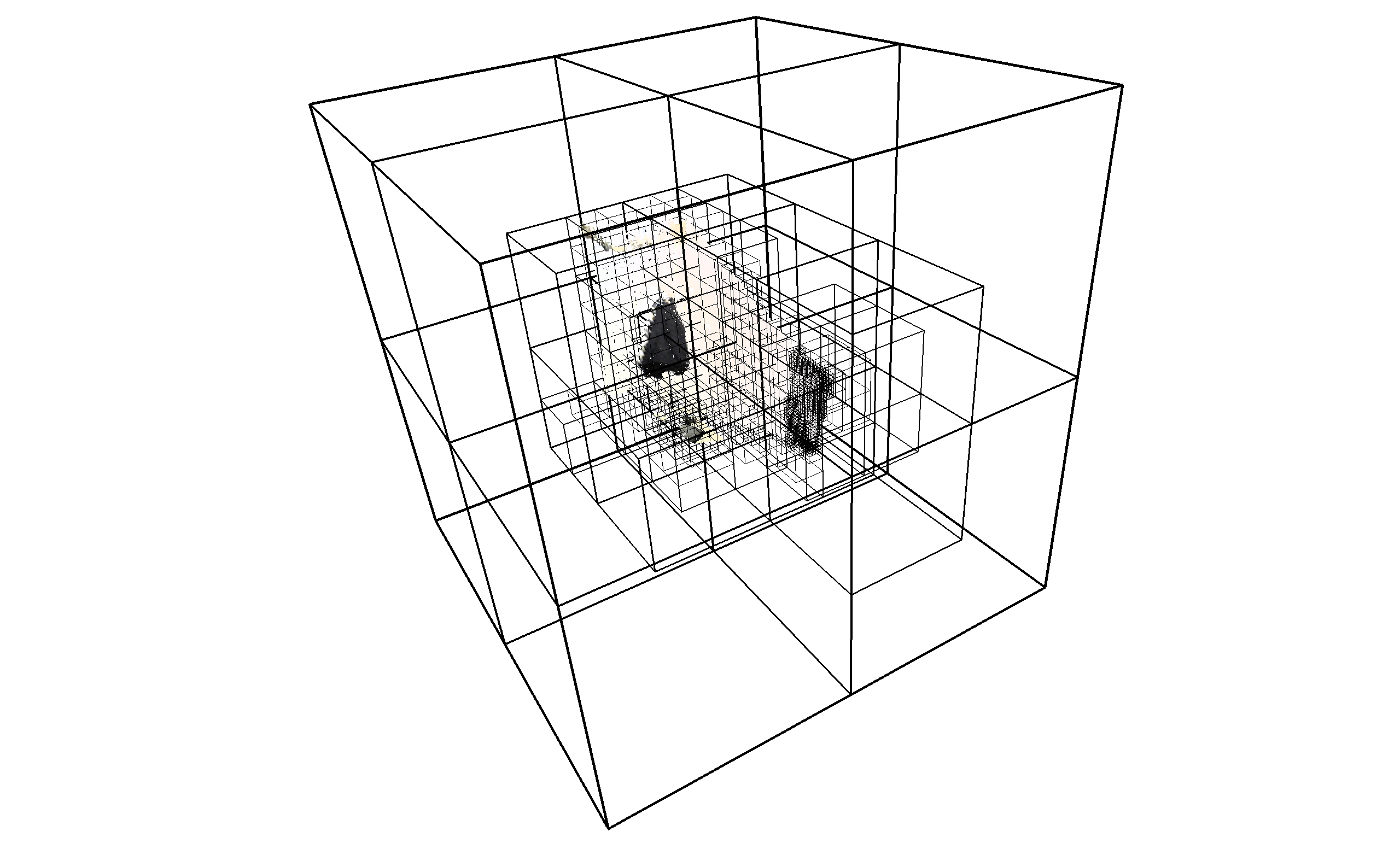
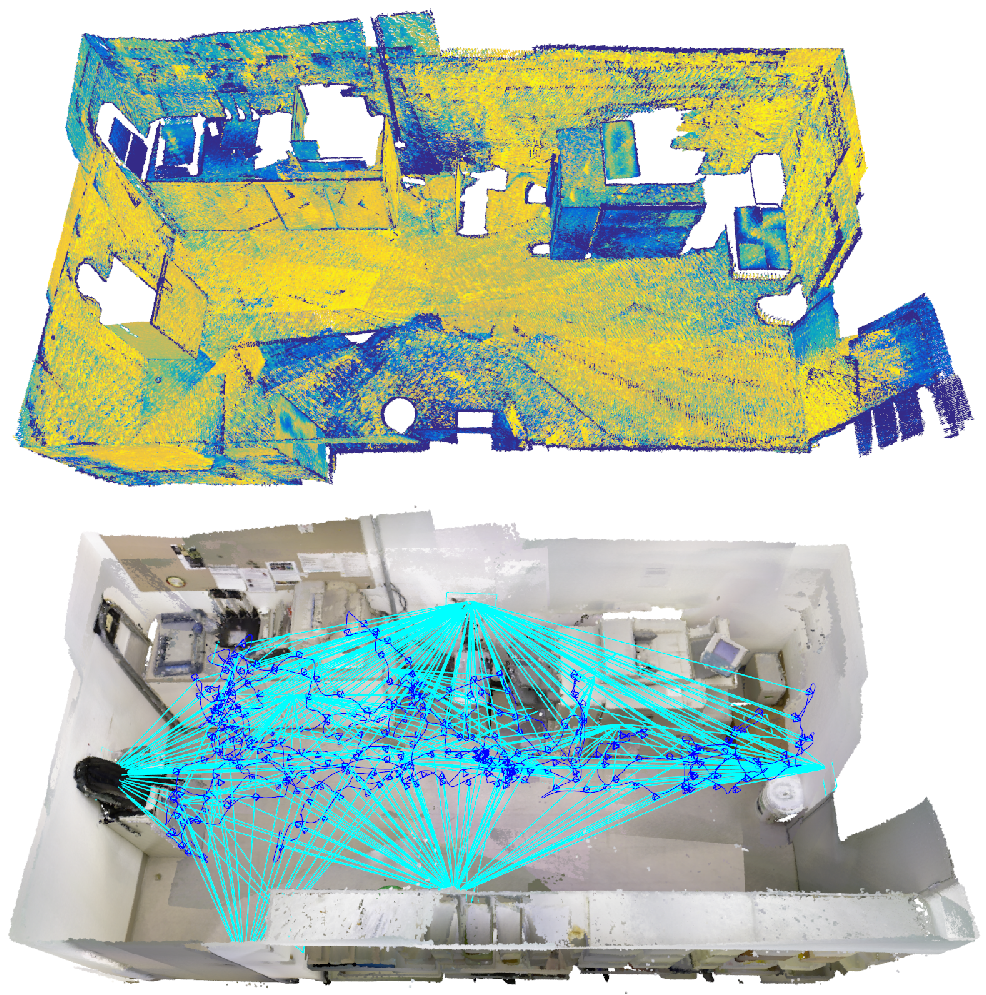
Large-Scale Multi-Resolution Surface Reconstruction from RGB-D Sequences , In IEEE International Conference on Computer Vision (ICCV), 2013.
[] 
Dense Visual SLAM for RGB-D Cameras , In Proc. of the Int. Conf. on Intelligent Robot Systems (IROS), 2013.
[] 
Direct Camera Pose Tracking and Mapping With Signed Distance Functions , In Demo Track of the RGB-D Workshop on Advanced Reasoning with Depth Cameras at the Robotics: Science and Systems Conference (RSS), 2013.
[] 
Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions , In Robotics: Science and Systems Conference (RSS), 2013.
[] 
Robust Odometry Estimation for RGB-D Cameras , In International Conference on Robotics and Automation (ICRA), 2013.
Best Vision Paper Award - Finalist
Other Publications
2012
[] 
Odometry from RGB-D Cameras for Autonomous Quadrocopters , Master's thesis, Technical University Munich, 2012.


