This is an old revision of the document!
Brief Bio
Jakob Engel received his Bachelor degree in Computer Science in 2009 and his Master degree in December 2011 at the Technical University of Munich (Germany). He received the SIEMENS Award for the best Master's Thesis 2012 for his work on Autonomous Camera-Based Navigation of a Quadrocopter. Since September 2012 he is a full-time PhD Student in the Computer Vision Group at the TU Munich, headed by Prof. Daniel Cremers. His main research interests are visual SLAM (monocular, stereo and RGB-D), 3D reconstruction and vision-based navigation of (Nano-)Quadrotors. He received the EMVA Young Professional Award 2014 for his work on Semi-Dense Visual Odometry (LSD-SLAM). Since July 2016, he is a full-time researcher at Oculus Research.
Research Interests
- Direct Visual SLAM.
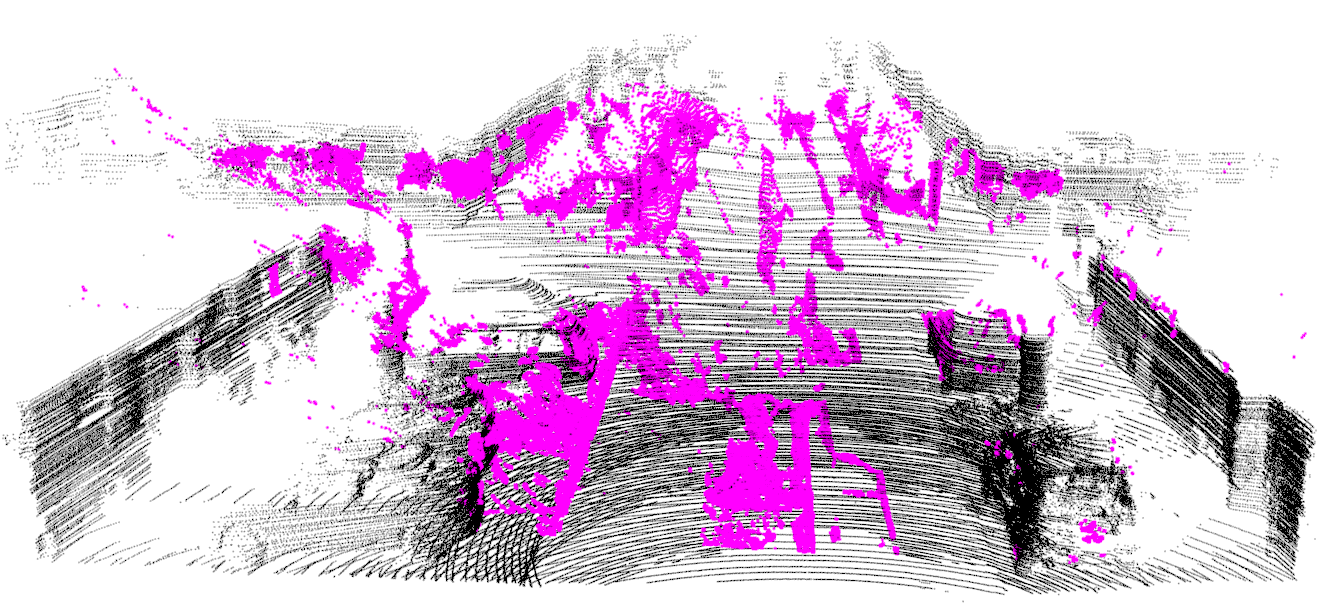
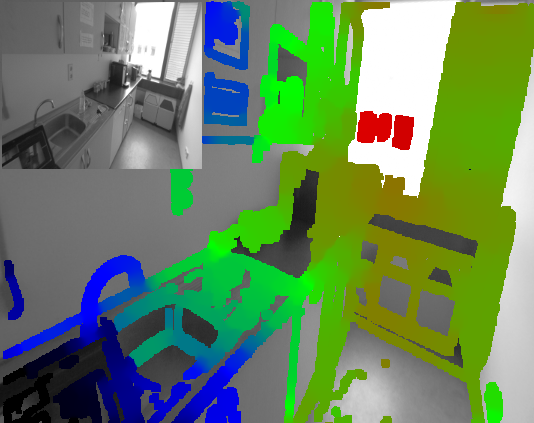
This video shows DSO: a novel direct and sparse monocular VO formulation we developed, and published as pre-print on arXiv in July 2016 (more details, code coming soon)
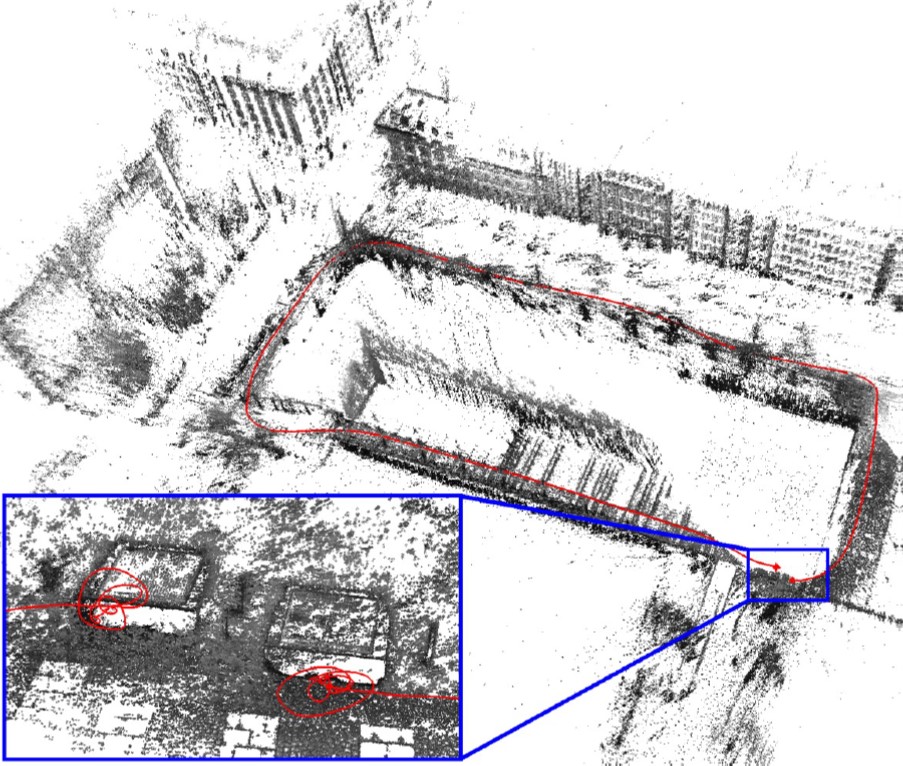
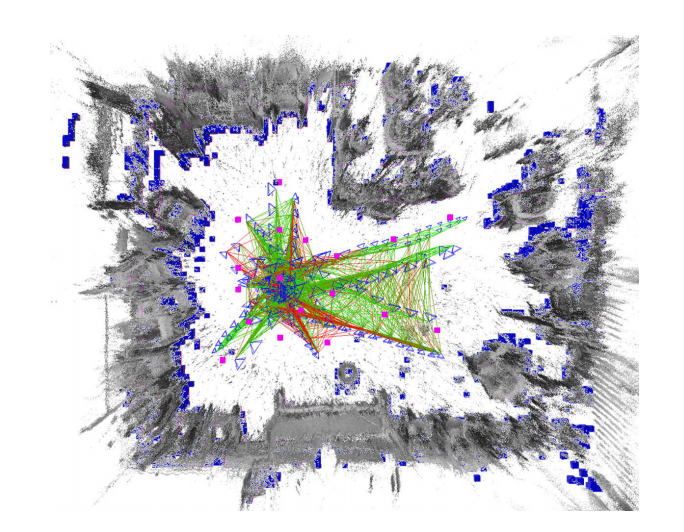
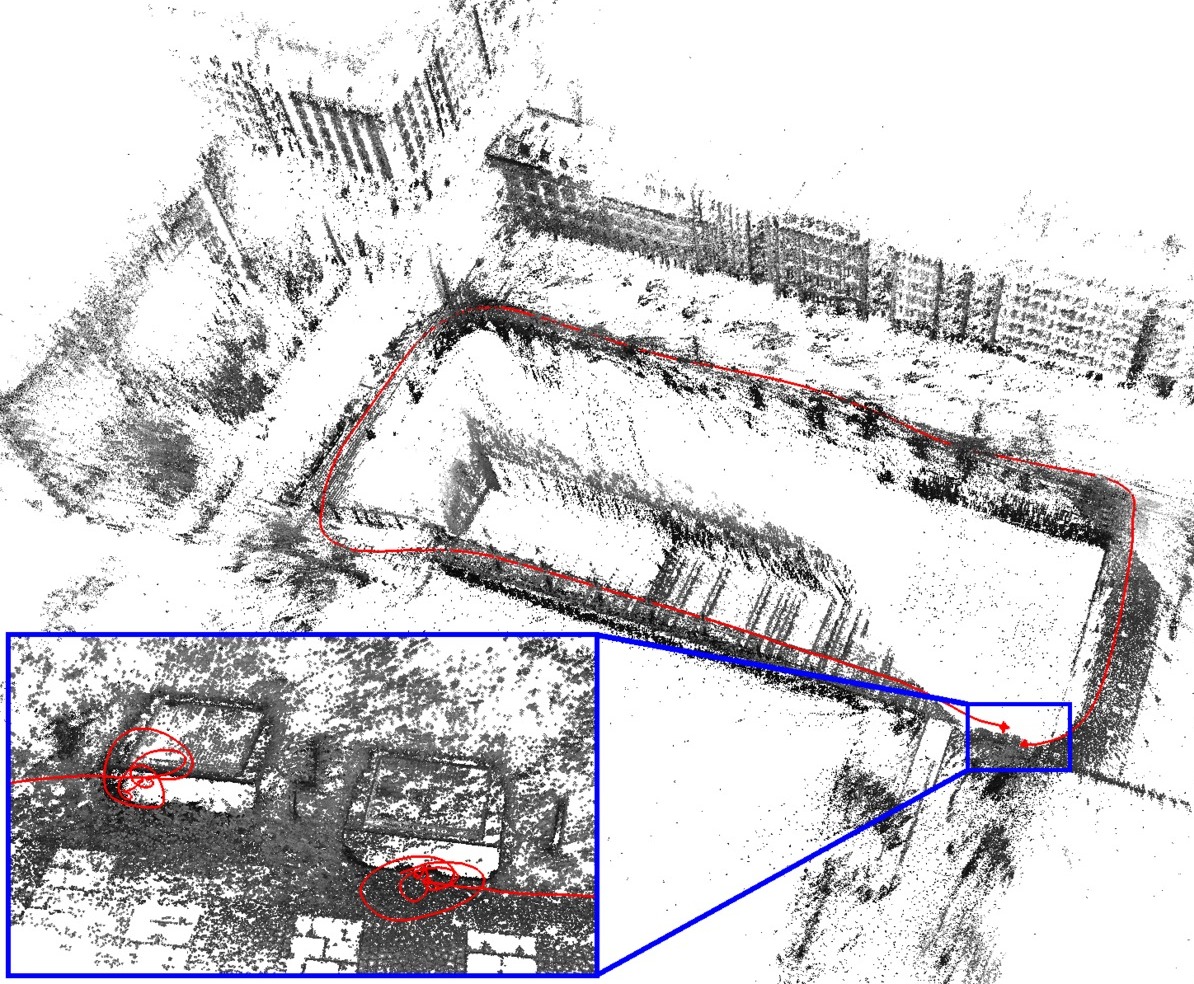
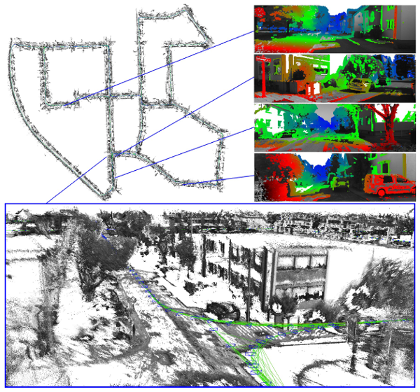
This video shows LSD-SLAM: a direct, large-scale monocular SLAM technique we developed, published at ECCV '14 (more details & code here):
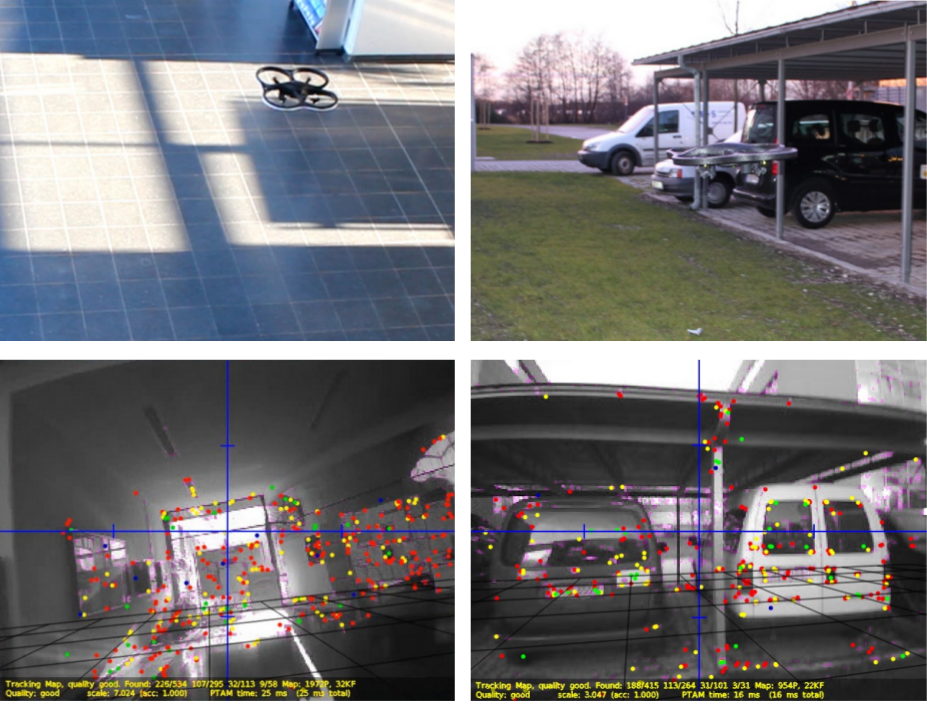
- Camera-based navigation of Quadrocopters, e.g. the Parrot AR.Drone: Check out this video demonstrating the result of my Master's Thesis (more details here):
Publications
Export as PDF, XML, TEX or BIB
Journal Articles
2018
[] 
Direct Sparse Odometry , In IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018.
2014
[] 
Scale-Aware Navigation of a Low-Cost Quadrocopter with a Monocular Camera , In Robotics and Autonomous Systems (RAS), volume 62, 2014.
Conference and Workshop Papers
2017
[] 
From Monocular SLAM to Autonomous Drone Exploration , In European Conference on Mobile Robots (ECMR), 2017. ([arXiv])
2016
[] 
Direct Sparse Odometry , In arXiv:1607.02565, 2016.
[] 
A Photometrically Calibrated Benchmark For Monocular Visual Odometry , In arXiv:1607.02555, 2016.
[] 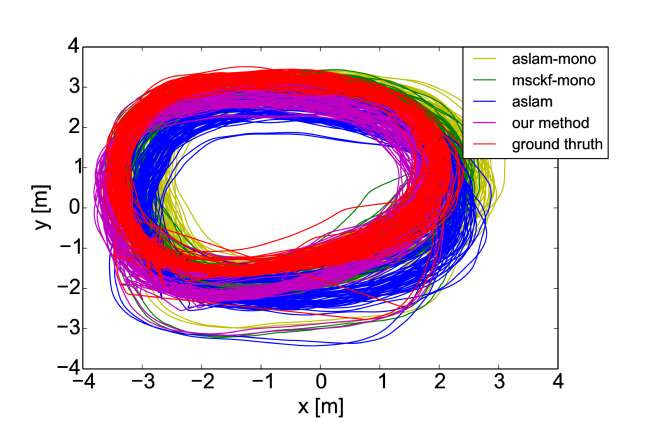
Direct Visual-Inertial Odometry with Stereo Cameras , In International Conference on Robotics and Automation (ICRA), 2016.
2015
[] 
Reconstructing Street-Scenes in Real-Time From a Driving Car , In Proc. of the Int. Conference on 3D Vision (3DV), 2015.
[] 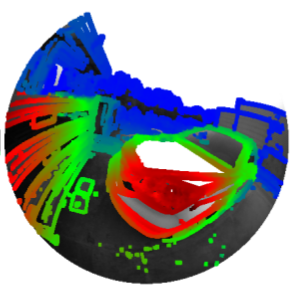
Large-Scale Direct SLAM for Omnidirectional Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
[] 
Large-Scale Direct SLAM with Stereo Cameras , In International Conference on Intelligent Robots and Systems (IROS), 2015.
2014
[] 
Visual-Inertial Navigation for a Camera-Equipped 25g Nano-Quadrotor , In IROS2014 Aerial Open Source Robotics Workshop, 2014.
[] 
Semi-Dense Visual Odometry for AR on a Smartphone , In International Symposium on Mixed and Augmented Reality, 2014.
Best Short Paper Award [] 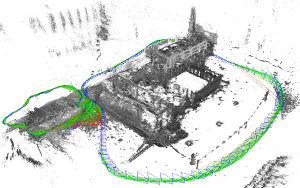
LSD-SLAM: Large-Scale Direct Monocular SLAM , In European Conference on Computer Vision (ECCV), 2014.
Oral Presentation
2013
[] 
Semi-Dense Visual Odometry for a Monocular Camera , In IEEE International Conference on Computer Vision (ICCV), 2013.
2012
[] 
Accurate Figure Flying with a Quadrocopter Using Onboard Visual and Inertial Sensing , In Proc. of the Workshop on Visual Control of Mobile Robots (ViCoMoR) at the IEEE/RJS International Conference on Intelligent Robot Systems (IROS), 2012.
[] 
Camera-Based Navigation of a Low-Cost Quadrocopter , In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
Other Publications
2011
[] 
Autonomous Camera-Based Navigation of a Quadrocopter , Master's thesis, Technical University Munich, 2011.
Distinguished with the SIEMENS award for best Master's Thesis 2012


