I am fascinated by the immense progress and application potential of computer vision and robotics research. My motivation is to push the state-of-the-art by developing novel approaches and applying these methods to solve real-world problems. For example, our approach to autonomous quadrocopter flight enables a low-cost quadrocopter to follow its trajectory using a camera as its main sensor while taking a series of images. Our 3D reconstruction algorithm allows to scan persons in 3D and print the acquired model as a small figure. As I see a large potential for commercial applications of such methods, I recently co-founded the university spin-off FabliTec to bring this technology to market.
Click here to see the full list of my publications.
Find me on Google Scholar, Microsoft Academic Search, DBLP.
Export as PDF, XML, TEX or BIB
|
| Conference and Workshop Papers
|
| 2013
|
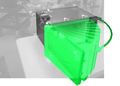
| [] | | CopyMe3D: Scanning and Printing Persons in 3D (J. Sturm, E. Bylow, F. Kahl and D. Cremers), In German Conference on Pattern Recognition (GCPR), 2013.
|
| [] |  | Graph-based bundle adjustment for INS-camera calibration (D. Bender, M. Schikora, J. Sturm and D. Cremers), In Unmanned Aerial Vehicle in Geomatics (UAV-g), 2013.
Best research paper award |
| [] |  | Real-Time Camera Tracking and 3D Reconstruction Using Signed Distance Functions (E. Bylow, J. Sturm, C. Kerl, F. Kahl and D. Cremers), In Robotics: Science and Systems Conference (RSS), 2013.
|
| [] |  | Robust Odometry Estimation for RGB-D Cameras (C. Kerl, J. Sturm and D. Cremers), In International Conference on Robotics and Automation (ICRA), 2013.
Best Vision Paper Award - Finalist |
| 2012
|
| [] |  | A Benchmark for the Evaluation of RGB-D SLAM Systems (J. Sturm, N. Engelhard, F. Endres, W. Burgard and D. Cremers), In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
|
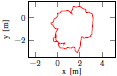
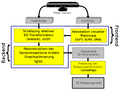
| [] |  | Camera-Based Navigation of a Low-Cost Quadrocopter (J. Engel, J. Sturm and D. Cremers), In Proc. of the International Conference on Intelligent Robot Systems (IROS), 2012.
|
| [] |  | An Evaluation of the RGB-D SLAM System (F. Endres, J. Hess, N. Engelhard, J. Sturm, D. Cremers and W. Burgard), In International Conference on Robotics and Automation (ICRA), 2012.
|
| 2009
|
| [] |  | Learning Kinematic Models for Articulated Objects (J. Sturm, V. Pradeep, C. Stachniss, C. Plagemann, K. Konolige and W. Burgard), In Proc. of the International Joint Conference on Artificial Intelligence (IJCAI), 2009.
|
| 2008
|
| [] |  | Adaptive Body Scheme Models for Robust Robotic Manipulation (J. Sturm, C. Plagemann and W. Burgard), In Robotics: Science and Systems Conference (RSS), 2008.
|
|
| PhD Thesis
|
| 2011
|
| [] |  | Approaches to Probabilistic Model Learning for Mobile Manipulation Robots (J. Sturm), PhD thesis, University of Freiburg, 2011.
Received the Artificial Intelligence Dissertation Award 2011 (ECCAI) and the Wolfgang-Genter-Award 2011 (University of Freiburg); Finalist at the Georges-Giralt-Award 2012 (EURON); Selected for the Best Paper Track at IJCAI 2013 |
|
| Other Publications
|
| 2012
|
| [] |  | Lecture Notes: Visual Navigation for Flying Robots (J. Sturm), Technische Universität München, Germany, 2012.
Distinguished with the TUM TeachInf Award for the best lecture in summer term 2012 |
Click here to see the full list of my publications.
Find me on Google Scholar, Microsoft Academic Search, DBLP.
Google+ page.




